一种徽章用抛光装置的制作方法
1.本实用新型涉及徽章加工技术领域,尤其涉及一种徽章用抛光装置。
背景技术:
2.徽章,简言之,就是佩戴在身上用来表示身份、职业、荣誉的标志。目前徽章的制作工艺中心必须对徽章进行抛光以满足徽章的工艺要求。
3.传统的方法,是人拿着徽章,对准抛光机的磨轮抛光,在抛光时存在以下问题:1、加工效率低,徽章打磨不一致,产生的粉尘危害人体,人工成本高;2、徽章抛光涉及到圆弧曲面,而磨轮很难满足圆弧曲面的打磨要求,同时磨轮质量大、振动大、噪音大,对机床刚度和强度要求较高,磨轮上磨粒分布随机,磨削性能差、精度低;3、传统的打磨机不方便更换磨轮,磨轮拆换速度较慢。
技术实现要素:
4.为了克服上述背景技术中存在的不足,本实用新型的目的在于提供一种徽章用抛光装置,设置的六轴机器人节省了人力,提高了抛光效率,设置的抛光带在对徽章进行抛光时,精度更高,同时抛光带方便更换,省时省力,有效解决了上述背景技术中提出的问题。
5.为实现上述目的,本实用新型技术解决方案如下:
6.一种徽章用抛光装置,包括底座,其特征在于:还包括设置在底座上的砂轮装置、输送装置、密闭罩壳、升降机构、六轴机器人,所述升降机构连接砂轮装置,所述砂轮装置、六轴机器人设置密闭罩壳内,所述六轴机器人的臂端上设置有末端执行器,所述密闭罩壳上设置有取料口和抽风口,所述输送装置上传动有托盘,托盘用于放置徽章,所述砂轮装置包括安装座、抛光带、传动轮组件、电机,所述电机动力输出轴连接传动轮组件,传动轮组件连接抛光带。
7.优选地,所述六轴机器人采用市售的abb1600机器人,所述六轴机器人固定安装在底座上。所述六轴机器人由旋转轴、下臂轴、上臂轴、手腕旋转轴、手腕摆动轴和手腕回转轴等6个关节构造,6个关节的合成实现6个自由度动作。
8.优选地,所述末端执行器为吸盘。所述吸盘可根据徽章的材料选择电磁吸盘或者真空吸盘。
9.优选地,所述传动轮组件包括主动轮、从动轮、第一传动轮、第二传动轮、第三传动轮,所述第一传动轮、第二传动轮、第三传动轮设置在安装座上并形成三角排列,所述第一传动轮、第二传动轮、第三传动轮外壁共同套接有抛光带,所述电机连接主动轮,所述第一传动轮同轴连接有从动轮,所述主动轮与从动轮之间通过皮带传动。
10.优选地,所述安装座与第三传动轮之间设置有快拆连接件,所述快拆连接件包括连接座、连接板、连接轴,所述连接座与安装座可拆卸式连接,所述连接座为u型,所述连接座侧边与连接板可拆卸式连接,所述连接板上设置有滑槽,所述连接轴插接在滑槽内,所述滑槽上端、连接轴上端设置有相匹配的固定孔。
11.优选地,所述安装座内固定安装有第二电动推杆,所述第二电动推杆动力输出轴连接有连接座。
12.优选地,所述升降机构包括支撑座、第一电动推杆、升降板、导轨,所述支撑座与底座可拆卸式连接,所述支撑座设置有竖直的安装板,所述第一电动推杆、导轨分别安装在安装板的两侧,所述安装板上设置有穿槽,所述穿槽内滑动连接有连接块,所述连接块一端连接有第一电动推杆动力输出轴,所述连接块另一端连接有升降板,所述升降板上设置有滑块,所述滑块与导轨铰接。
13.优选地,所述输送装置采用倍速链。
14.本实用新型有益效果如下:
15.1、使用六轴机器人替代人工,节省了人工成本,同时加工效率更高。
16.2、设置的抛光带相较于打磨轮,抛光带可以满足圆弧曲面的打磨要求,同时抛光带质量低、振动小、噪音小、抛光精度更高。
17.3、抛光带与安装座之间设置有快拆连接件,当抛光带断裂或损坏时,拆换十分方便。
18.本实用新型操作简单,功能实用,十分值得推广。
附图说明
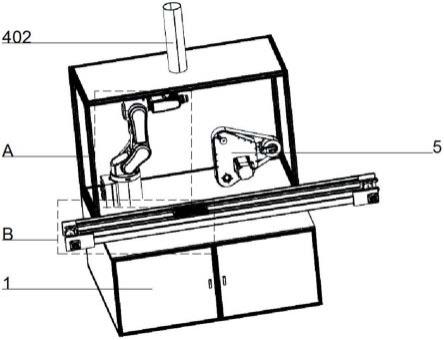
19.图1为本实用新型内部结构示意图。
20.图2为本实用新型外部结构示意图。
21.图3为本实用新型a区放大示意图。
22.图4为本实用新型b区放大示意图。
23.图5为本实用新型砂轮装置主视面分解示意图。
24.图6为本实用新型砂轮装置后视面分解示意图。
25.图7为本实用新型砂轮装置内部分解示意图。
26.图8为本实用新型c区放大示意图。
27.1、底座,2、六轴机器人,21、旋转轴,22、下臂轴,23、上臂轴,24、手腕旋转轴,25、手腕摆动轴,26、手腕回转轴,3、吸盘,4、密闭罩壳,401、取料口,402、抽风口,5、砂轮装置,51、安装座,52、抛光带,53、电机,54、传动轮组件,541、主动轮,542、从动轮,543、第一传动轮,544、第二传动轮,545、第三传动轮,546、皮带,6、升降机构,61、支撑座,62、第一电动推杆,63、升降板,631、滑块,64、导轨,65、安装板,651、穿槽,66、连接块,8、快拆连接件,81、连接座,82、连接板,821、滑槽,83、连接轴,84、固定孔,10、输送装置,11、托盘,12、第二电动推杆。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
29.在本实用新型中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机
械连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
30.请参阅图1至图7,一种徽章用抛光装置,包括底座1,其特征在于:还包括设置在底座1上的砂轮装置5、输送装置10、密闭罩壳4、升降机构6、六轴机器人2,所述升降机构6连接砂轮装置5,所述砂轮装置5、六轴机器人2设置密闭罩壳4内,所述六轴机器人2的臂端上设置有末端执行器,所述密闭罩壳4上设置有取料口401和抽风口402,所述输送装置10上传动有托盘11,托盘11用于放置徽章,所述砂轮装置5包括安装座51、抛光带52、传动轮组件54、电机53,所述电机53动力输出轴连接传动轮组件54,传动轮组件54连接抛光带52。
31.请参阅图1,所述抽风口402上方可连接抽风机等装置,抛光时产生的粉尘,可通过抽风机抽出并排到粉尘收集设备中。
32.请参阅图3,在本实施例中,所述六轴机器人2采用市售的abb1600机器人,所述六轴机器人2固定安装在底座1上。所述六轴机器人2是最典型的机器人构型,所述六轴机器人2由旋转轴21、下臂轴22、上臂轴23、手腕旋转轴2421、手腕摆动轴25和手腕回转轴26等6个关节构造,6个关节的合成实现6个自由度动作,使六轴协作机器人具有高灵活性、超大负载、高定位精度等众多优点。在本实施例中,所述旋转轴21与底座1连接,承载着整个六轴机器人2的重量和机器人左右水平的大幅度摆动;所述下臂轴22与旋转轴21连接,下臂轴22主要是控制六轴机器人2前后摆动、伸缩;所述上臂轴23与下臂轴22连接,上臂轴23用于控制六轴机器人2前后摆动,不过摆动幅度比第二轴要小很多;所述手腕旋转轴2421与上臂轴23连接,所述手腕旋转轴2421轴用于控制上臂部分180
°
自由旋转,相当于人的小臂;所述手腕摆动轴25与手腕旋转轴2421连接,当你差不多调好位置后,精准定位到徽章上,就要用到手腕摆动轴25,相当于人手腕部分;所述手腕回转轴26一端与手腕摆动轴25连接,另一端与末端执行器连接,当手腕摆动轴25定位到徽章上之后,需要一些微小的改动,就需要用到第手腕回转轴26,手腕回转轴26相当于可以水平360
°
旋转的一个转盘了,可以更精确定位到徽章。
33.请参阅图3,在本实施例中,所述末端执行器为吸盘3。所述吸盘3可根据徽章的材料选择电磁吸盘3或者真空吸盘3。当吸盘3选择电磁吸盘3时,电磁吸盘3内部设置有线圈,外部设置有导磁面板,内部线圈得通电后,导磁面板产生磁力,将接触在面板表面的徽章紧紧吸住,内部线圈断电后,导磁面板磁力消失实现退磁,徽章与导磁面板分离。当吸盘3选择真空吸盘3时,本装置需要额外配备气泵,真空吸盘3通过其自身的接管与真空设备(气泵等)相连接,然后与徽章接触,开启真空设备抽吸空气,使吸盘3内的空气被吸出,产生负气压,这样就可以把徽章吸牢固,进而实现移动徽章,当徽章抛光完成后,六轴机器人2把徽章放回到托盘11内,就可以再次打开真空设备,进行真空吸盘3内的充气,这样真空吸盘3内的气压就会升高,徽章就可以脱离真空吸盘3的吸附了。在本实施例中,吸盘3选择电磁吸盘3。因为电磁吸盘和真空吸盘皆为现有技术,并且选择情况视徽章材料而定,故在附图中不再提供吸盘3相关结构及连接方式的详细附图。
34.请参阅图5、图7,在本实施例中,所述传动轮组件54包括主动轮541、从动轮542、第一传动轮543、第二传动轮544、第三传动轮545,所述第一传动轮543、第二传动轮544、第三传动轮545设置在安装座51上并形成三角排列,所述第一传动轮543、第二传动轮544、第三传动轮545外壁共同套接有抛光带52,所述电机53连接主动轮541,所述第一传动轮543同轴
连接有从动轮542,所述主动轮541与从动轮542之间通过皮带546传动。使用原理:启动电机53,电机53转动带动主动轮541转动,主动轮541通过皮带546带动从动轮542转动,所述从动轮542转动带动第一传动轮543转动,第一传动轮543通过抛光带52带动第二传动轮544、第三传动轮545同步转动,同时抛光带52也实现转动。本技术中使用抛光带52对徽章进行抛光,满足了徽章圆弧曲面的打磨要求,同时抛光带52质量低、振动小、噪音小、抛光精度更高。
35.请参阅图7,在本实施例中,所述安装座51与第三传动轮545之间设置有快拆连接件8,所述快拆连接件8包括连接座81、连接板82、连接轴83,所述连接座81与安装座51可拆卸式连接,所述连接座81为u型,所述连接座81侧边与连接板82可拆卸式连接,所述连接板82上设置有滑槽821,所述连接轴83插接在滑槽821内,所述滑槽821上端、连接轴83上端设置有相匹配的固定孔84。所述连接座81侧边和连接板82上设置有相匹配的螺纹孔,可通过螺栓将连接板82固定在连接座81侧边上。固定孔84的位置要满足,当滑槽821的固定孔84与连接轴83的固定孔84对齐时,抛光带52正好紧贴在第一传动轮543、第二传动轮544、第三传动轮545上,使得传动轮转动时,可带动抛光带转动,同时第三传动轮545两侧设置有限位板,用于防止抛光带52跑偏。
36.请参阅图7,在本实施例中,所述安装座51内固定安装有第二电动推杆12,所述第二电动推杆12动力输出轴连接有连接座。启动第二电动推杆12,第二电动推杆12可带动快拆连接件和第一传动轮543向前移动或者向后倒退。
37.抛光带52快速拆装原理:
38.请参阅5至图7,首先,先对第一传动轮543、连接板82,进行安装,过程如下:将第一传动轮543放置于u型的连接座81之间,然后将一个连接板82通过螺栓安装在连接座81侧边,连接板82连接时,第一传动轮543的连接轴83要插进连接板82的滑槽821内,然后再将另一个连接板82通过螺栓安装在连接座81的另一边,第一传动轮543的连接轴83同时插进该连接座81的滑槽821内。接着沿滑槽821移动第一传动轮543,直至滑槽821的固定孔84与连接轴83的固定孔84对齐时,停止移动第一传动轮543,然后通过螺栓穿过固定孔84将连接板82与连接轴83固定。第一传动轮543、连接板82安装完成后,除非第一传动轮543、连接板82损坏,否则可以永久使用。而每次单独更换抛光带52时,不需要再次对第一传动轮543、连接板82进行安装。
39.安装抛光带52时:启动第二电动推杆12,第二电动推杆12带动快拆连接件8和第一传动轮543向后倒退,然后将抛光带52套接在第一传动轮543、第二传动轮544、第三传动轮545上,最后,再次启动第二电动推杆12,第二电动推杆12带动快拆连接件8和第一传动轮543向前移动,直至抛光带52紧贴在第一传动轮543、第二传动轮544、第三传动轮545上时,停止推动,此时传动轮转动可带动抛光带52传动。
40.抛光带52拆卸过程:启动第二电动推杆12,第二电动推杆12带动快拆连接件8和第一传动轮543向后倒退,抛光带52渐渐与第三传动轮545分离,当抛光带52与第三传动轮545完全分离时,即可取下抛光带52。
41.由上可知,拆卸和安装抛光带52只需要启动第二电动推杆12,通过第二电动推杆12带动快拆连接件8和第一传动轮543向前移动或者向后倒退,即可非常方便的安装和拆卸抛光带52。
42.请参阅图8,在本实施例中,所述升降机构6包括支撑座61、第一电动推杆66、升降板63、导轨64,所述支撑座61与底座1可拆卸式连接,所述支撑座61设置有竖直的安装板65,所述第一电动推杆66、导轨64分别安装在安装板65的两侧,所述安装板65上设置有穿槽651,所述穿槽651内滑动连接有连接块66,所述连接块66一端连接有第一电动推杆66动力输出轴,所述连接块66另一端连接有升降板63,所述升降板63上设置有滑块631,所述滑块631与导轨64铰接。所述导轨64和滑块631主要起到限位作用,防止砂轮装置5向左或向右偏移,使得与其连接的连接块66与穿槽651发生摩擦碰撞,增大连接块66移动的阻力。
43.使用原理:上移砂轮装置5过程:启动第一电动推杆66,第一电动推杆66推动连接块66上移,连接块66上移带动升降板63沿着导轨64上移,升降板63上移带动砂轮装置5整体上移。下移砂轮装置5过程:启动第一电动推杆66,第一电动推杆66带动连接块66下移,连接块66下移带动升降板63沿着导轨64下移,升降板63下移带动砂轮装置5整体下移。
44.请参阅图4,在本实施例中,所述输送装置10采用倍速链。所述倍速链为现有技术,其具体结构不在阐述。所述托盘11为与倍速链相匹配的现有装置,倍速链移动可带动托盘11移动。
45.徽章抛光过程如下:
46.1、启动输送装置10,输送装置10输送托盘11。
47.2、当输送装置10带动托盘11把徽章输送到取料口401处时,六轴机器人2带动吸盘3从密闭罩壳4的取料口401处伸出,吸盘3吸取徽章,然后六轴机器人2带动徽章从取料口401回退到密闭罩壳4内,六轴机器人2带动徽章靠近抛光带52。
48.3、启动电机53,电机53转动带动主动轮541转动,主动轮541通过皮带546带动从动轮542转动,所述从动轮542转动带动第一传动轮543转动,第一传动轮543通过抛光带52带动第二传动轮544、第三传动轮545同步转动,同时抛光带52也实现转动。此时,抛光带52对徽章进行打磨。
49.4、抛光完成后,六轴机器人2把徽章送回托盘11处,然后吸盘3解除对徽章的吸力,六轴机器人2最后回缩到密闭罩壳4内,至此,一个徽章的抛光过程完成。
50.综上所述,本实用新型达到了预期效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1