一种适用软体工件的机器人工作站的制作方法
本技术属于机器人,特别涉及一种适用软体工件的机器人工作站。
背景技术:
1、随着自动化、智能化产业的发展,传统行业进行改革创新已经是当代趋势。造型机是用于制造砂箱的压铸设备,它的主要功能是:将特制的散砂按照不同的模具通过压铸的方式形成砂箱。在成型的砂箱中的指定位置预先置入过滤片,以保证在后续产品的浇铸过程中不混入杂质。过滤片一般是泡沫陶瓷矩形片,具有脆性,容易掉渣的特性。对造型机的上模具吹气,吹气完成后将过滤片放置到模具的指定位置。吹气具有除尘、冷却等工艺效果,传统方式是通过人工完成吹气和放置过滤片,不仅耗时,而且效率非常低,人力成本高。因此,急需设计一种能实现自动吹气和过滤片上料的机器人工作站。
技术实现思路
1、针对上述问题,本实用新型的目的在于提供一种适用软体工件的机器人工作站。
2、为了实现上述目的,本实用新型采用以下技术方案:
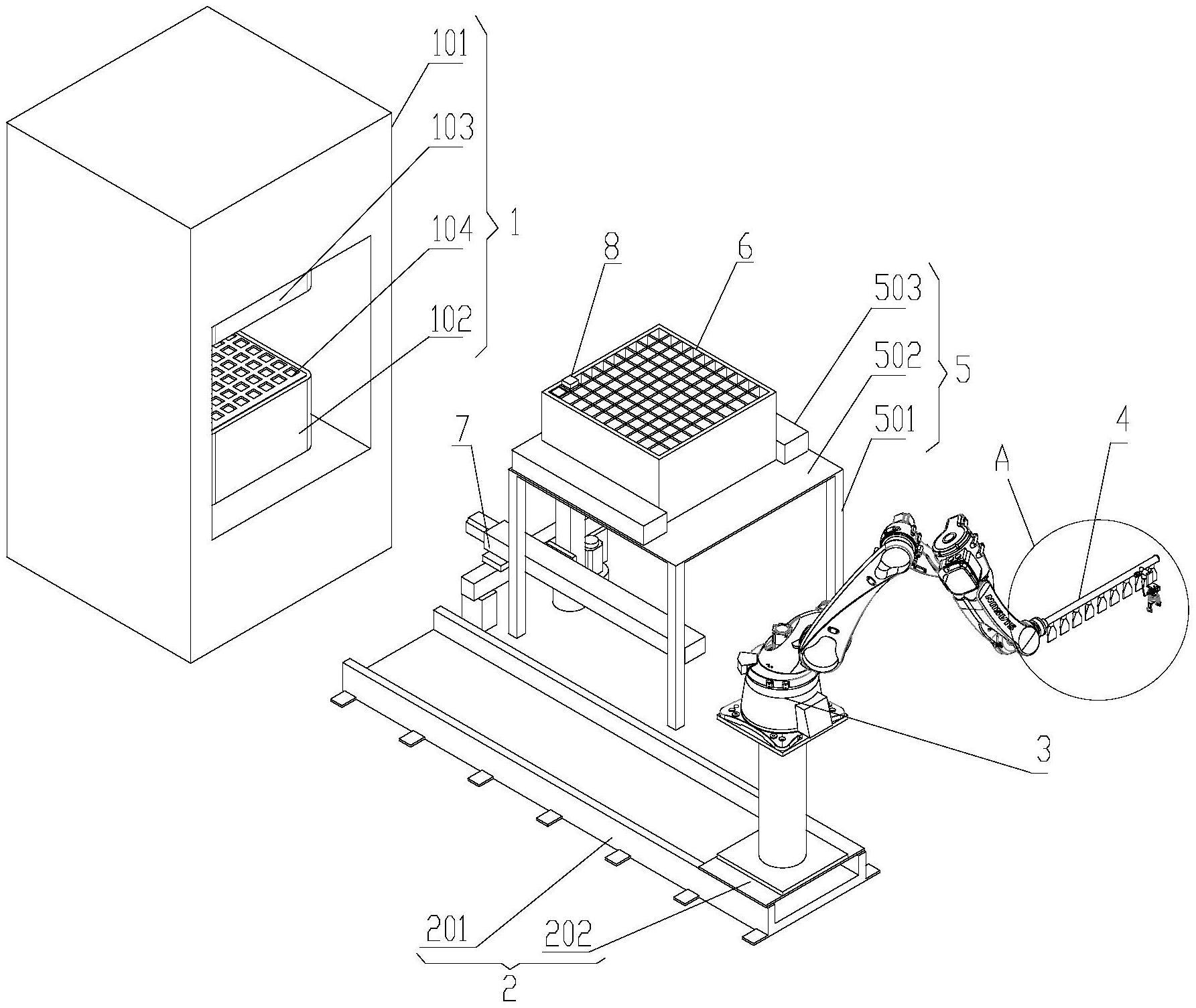
3、本实用新型提供一种适用软体工件的机器人工作站,其特征在于,包括机器人滑台、机器人、末端执行器、上料台、上料框及上料机构,其中上料台上放置上料框,上料框用于放置软体工件,机器人滑台设置于上料台的一侧,机器人设置于机器人滑台的上方,机器人的执行末端设置末端执行器,末端执行器用于吹气和抓取软体工件;上料机构设置于上料台的下方,上料机构用于在上料框的底部向上托举软体工件,使软体工件露于上料框的上方,方便末端执行器抓取。
4、在一种可能实现的方式中,所述末端执行器包括法兰、主管道、主喷嘴、副管道、副喷嘴、l型板及柔性夹爪,其中主管道的一端通过法兰与所述机器人的执行末端连接;主管道的侧壁上沿长度方向间隔设有多个主喷嘴,主管道的另一端垂直设有副管道,副管道的侧壁上设有副喷嘴,副管道的末端与l型板连接,柔性夹爪设置于l型板上。
5、在一种可能实现的方式中,所述副喷嘴与所述主喷嘴位于所述主管道的同一侧,且所述副喷嘴朝向所述柔性夹爪倾斜设置。
6、在一种可能实现的方式中,所述机器人滑台包括滑台体和滑板,其中滑台体为长方体结构,滑台体内设有直线模组,滑板与滑台体滑动连接,且与直线模组连接;所述机器人设置于滑板上。
7、在一种可能实现的方式中,所述上料台包括台面及设置于台面底部的四个支腿,其中台面的边缘设有定位条,定位条为一侧开口的方形结构,开口侧作为所述上料框进出口;台面的中心设有矩形孔,矩形孔的尺寸小于所述上料框的尺寸。
8、在一种可能实现的方式中,所述上料框上阵列有多个料腔,各料腔的底部设有用于所述上料机构穿过的圆孔。
9、在一种可能实现的方式中,所述上料机构包括下直线模组、上直线模组及伺服电缸,其中下直线模组的两端分别通过两个支柱支撑;上直线模组正交设置于下直线模组上,伺服电缸与上直线模组的输出端连接,伺服电缸的电缸杆沿竖直方向伸缩,电缸杆可插入所述上料框底部的圆孔内。
10、在一种可能实现的方式中,所述的适用软体工件的机器人工作站还包括造型机,所述机器人滑台和所述上料台均设置于造型机的前侧,所述软体工件为过滤片,所述机器人通过末端执行器对造型机的上、下模具吹气除尘及进行过滤片的上料。
11、本实用新型的优点及有益效果是:本实用新型提供的一种适用软体工件的机器人工作站,实现自动吹气和柔性抓取上料的过程,省时省力,工作效率高,提高了安全性。
12、本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
13、下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
技术特征:
1.一种适用软体工件的机器人工作站,其特征在于,包括机器人滑台(2)、机器人(3)、末端执行器(4)、上料台(5)、上料框(6)及上料机构(7),其中上料台(5)上放置上料框(6),上料框(6)用于放置软体工件,机器人滑台(2)设置于上料台(5)的一侧,机器人(3)设置于机器人滑台(2)的上方,机器人(3)的执行末端设置末端执行器(4),末端执行器(4)用于吹气和抓取软体工件;上料机构(7)设置于上料台(5)的下方,上料机构(7)用于在上料框(6)的底部向上托举软体工件,使软体工件露于上料框(6)的上方,方便末端执行器(4)抓取。
2.根据权利要求1所述的适用软体工件的机器人工作站,其特征在于,所述末端执行器(4)包括法兰(401)、主管道(402)、主喷嘴(403)、副管道(404)、副喷嘴(405)、l型板(406)及柔性夹爪(407),其中主管道(402)的一端通过法兰(401)与所述机器人(3)的执行末端连接;主管道(402)的侧壁上沿长度方向间隔设有多个主喷嘴(403),主管道(402)的另一端垂直设有副管道(404),副管道(404)的侧壁上设有副喷嘴(405),副管道(404)的末端与l型板(406)连接,柔性夹爪(407)设置于l型板(406)上。
3.根据权利要求2所述的适用软体工件的机器人工作站,其特征在于,所述副喷嘴(405)与所述主喷嘴(403)位于所述主管道(402)的同一侧,且所述副喷嘴(405)朝向所述柔性夹爪(407)倾斜设置。
4.根据权利要求1所述的适用软体工件的机器人工作站,其特征在于,所述机器人滑台(2)包括滑台体(201)和滑板(202),其中滑台体(201)为长方体结构,滑台体(201)内设有直线模组,滑板(202)与滑台体(201)滑动连接,且与直线模组连接;所述机器人(3)设置于滑板(202)上。
5.根据权利要求1所述的适用软体工件的机器人工作站,其特征在于,所述上料台(5)包括台面(502)及设置于台面(502)底部的四个支腿(501),其中台面(502)的边缘设有定位条(503),定位条(503)为一侧开口的方形结构,开口侧作为所述上料框(6)进出口;台面(502)的中心设有矩形孔(504),矩形孔(504)的尺寸小于所述上料框(6)的尺寸。
6.根据权利要求5所述的适用软体工件的机器人工作站,其特征在于,所述上料框(6)上阵列有多个料腔,各料腔的底部设有用于所述上料机构(7)穿过的圆孔(604)。
7.根据权利要求6所述的适用软体工件的机器人工作站,其特征在于,所述上料机构(7)包括下直线模组(702)、上直线模组(703)及伺服电缸(704),其中下直线模组(702)的两端分别通过两个支柱(701)支撑;上直线模组(703)正交设置于下直线模组(702)上,伺服电缸(704)与上直线模组(703)的输出端连接,伺服电缸(704)的电缸杆(705)沿竖直方向伸缩,电缸杆(705)可插入所述上料框(6)底部的圆孔(604)内。
8.根据权利要求1-7任一项所述的适用软体工件的机器人工作站,其特征在于,还包括造型机(1),所述机器人滑台(2)和所述上料台(5)均设置于造型机(1)的前侧,所述软体工件为过滤片(8),所述机器人(3)通过末端执行器(4)吹气除尘及进行过滤片(8)的上料。
技术总结
本技术属于机器人技术领域,特别涉及一种适用软体工件的机器人工作站。该机器人工作站包括机器人滑台、机器人、末端执行器、上料台、上料框及上料机构,其中上料台上放置上料框,上料框用于放置软体工件,机器人滑台设置于上料台的一侧,机器人设置于机器人滑台的上方,机器人的执行末端设置末端执行器,末端执行器用于吹气和抓取软体工件;上料机构设置于上料台的下方,上料机构用于在上料框的底部向上托举软体工件,使软体工件露于上料框的上方,方便末端执行器抓取。本技术实现自动吹气和柔性抓取上料的过程,省时省力,工作效率高,提高了安全性。
技术研发人员:钟钊,李峰亮,刘新宇,马英凯,朱维金
受保护的技术使用者:天津新松机器人自动化有限公司
技术研发日:20220722
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!