一种用于整体叶盘机器人抛光的末端执行器
本发明属于机器人加工,具体涉及一种用于整体叶盘机器人抛光的末端执行器。
背景技术:
1、叶盘是发动机、燃气轮机、压气机等设备中直接参与能量转换的关键零部件,加工后的表面质量要求很高,整体叶盘是把叶片和轮盘设计成一个整体,采用整体加工方式制造而成的,无需榫头和榫槽。整体叶盘的轮缘径向高度及厚度都有很大程度上的减小,减重效果明显,并且消除了分体结构榫齿根部缝隙中气体的逸流损失,避免了叶片和轮盘装配不当造成的微动磨损、裂纹以及锁片损坏带来的故障,从而有利于提高工作效率,可靠性得以进一步提升。
2、然而,整体叶盘的加工过程较为困难且要求更高,整体叶盘的磨抛加工是指去除叶盘表面铣削加工的纹路使其表面光滑,整体叶盘待磨抛的部位有叶片进排气边、叶片内外弧面、叶根转角和轮盘型面流道。由于磨抛部位多,并且各个部位加工方式不同,目前,整体叶盘磨抛多由人工磨抛完成,劳动强度大,粉尘污染严重,人力成本较高,一个中型尺寸整体叶盘大约需要3天~4天的打磨时间,另外手工磨抛加工受人工师傅的经验影响,加工一致性较差。相应地,本领域存在着发展一种效率较高的整体叶盘的机器人智能磨抛方法的技术需求。
3、由于抛光组件是加装在工业机器人机械臂上,抛光时产生的数据无法及时反馈到电脑上,使得整体叶盘的加工精度无法得到有效的提升。并且由于抛光面的不平整导致抛光时会产生振动,当振动得不到抑制时,将会对抛光件外表面造成损伤。
技术实现思路
1、本发明的目的在于提供一种用于整体叶盘机器人抛光的末端执行器。
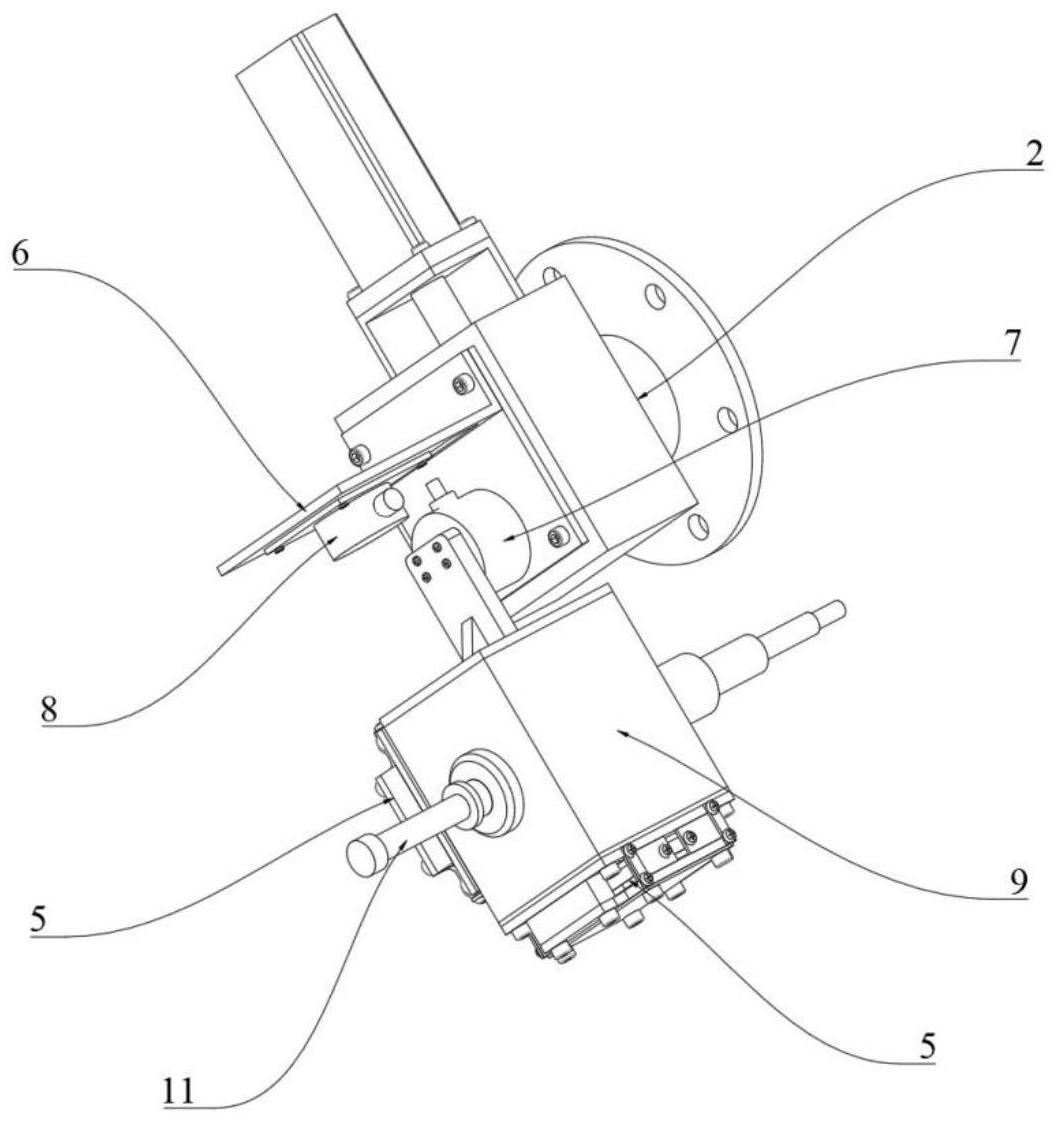
2、本发明一种用于整体叶盘机器人抛光的末端执行器,包括定位台、传感器组件、抛光组件和振动抑制组件;所述的传感器组件包括三轴力传感器;抛光组件与定位台之间通过三轴力传感器连接;振动抑制组件安装在抛光组件上;
3、所述振动抑制组件包括抑制底座、永磁铁、铜板和钢板;抑制底座内设置有空腔;铜板和钢板均安装在空腔中;钢板与铜板能够相对运动;钢板上固定有永磁铁;钢板与抑制底座的内侧壁之间均设置有弹性件。
4、作为优选,所述的抑制底座内设有两块铜板;两块铜板对称固定于空腔内壁;两块铜板的相对侧面之间存在空隙形成活动腔;所述钢板设置在活动腔内。
5、作为优选,所述钢板的两侧面分别朝向两块铜板,且均固定有永磁铁。
6、作为优选,钢板两侧面上的永磁铁数量相等,且位置分别对应。
7、作为优选,该用于整体叶盘机器人抛光的末端执行器安装在工业机器人的末端安装部;所述的传感器组件和抛光组件设置在定位台背离工业机器人的一侧。
8、作为优选,所述传感器组件还包括固定板件和测距传感器,所述测距传感器固定在固定板件上,且朝向抛光组件。
9、作为优选,所述弹性件采用弹簧,将钢板运动的动能转换为弹性势能。
10、作为优选,所述的钢板的两端均设置有弹簧;弹簧的一端抵住钢板的端部;弹簧的另一端抵住抑制底座的内侧壁。
11、作为优选,所述的振动抑制组件有多个;各振动抑制组件安装在定位台的不同侧面上;作为优选,所述的永磁铁与铜板的间距为0.5mm~1mm。
12、本发明具有的有益效果是:
13、1、本发明通过设置振动抑制组件,通过将抛光时产生的振动能量,由永磁铁的运动,磁场的变化切割,从而转换为热能消耗,以此来抑制抛光组件的振动幅度,提高加工的精确度。
14、2、本发明通过设置传感器组件,将三轴力传感器与抛光组件位置的限定,以及接收抛光组件所传递振动力的大小,由测距传感器测得抛光组件的空间位置,便于对抛光组件位置及时做出调整,避免对抛光件加工精度产生影响。
技术特征:
1.一种用于整体叶盘机器人抛光的末端执行器,其特征在于:包括定位台(2)、传感器组件、抛光组件(4)和振动抑制组件(5);所述的传感器组件包括三轴力传感器(7);抛光组件(4)与定位台(2)之间通过三轴力传感器(7)连接;振动抑制组件(5)安装在抛光组件(4)上;
2.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述的抑制底座(12)内设有两块铜板(10);两块铜板(10)对称固定于空腔内壁;两块铜板(10)的相对侧面之间存在空隙形成活动腔;所述钢板(3)设置在活动腔内。
3.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述钢板(3)的两侧面分别朝向两块铜板(10),且均固定有永磁铁(13)。
4.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述钢板(3)两侧面上的永磁铁(13)数量相等,且位置分别对应。
5.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:安装在工业机器人的末端安装部;所述的传感器组件和抛光组件(4)设置在定位台(2)背离工业机器人的一侧。
6.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述传感器组件还包括固定板件(6)和测距传感器(8),所述测距传感器(8)固定在固定板件(6)上,且朝向抛光组件(4)。
7.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述弹性件采用弹簧(1),将钢板(3)运动的动能转换为弹性势能。
8.根据权利要求7所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述的钢板(3)的两端均设置有弹簧(1);弹簧(1)的一端抵住钢板(3)的端部;弹簧(1)的另一端抵住抑制底座(12)的内侧壁。
9.根据权利要求1所述的一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述的振动抑制组件(5)有多个;各振动抑制组件(5)安装在定位台(2)的不同侧面上。
10.根据权利要求3所述一种用于整体叶盘机器人抛光的末端执行器,其特征在于:所述的永磁铁(13)与铜板(10)的间距为0.5mm~1mm。
技术总结
本发明公开了一种用于整体叶盘机器人抛光的末端执行器,其包括定位台、传感器组件、抛光组件和振动抑制组件;所述的传感器组件包括三轴力传感器;抛光组件与定位台之间通过三轴力传感器连接;振动抑制组件安装在抛光组件上;所述振动抑制组件包括抑制底座、永磁铁、铜板和钢板;抑制底座内设置有空腔;铜板和钢板均安装在空腔中;钢板与铜板能够相对运动;钢板上固定有永磁铁;钢板与抑制底座的内侧壁之间均设置有弹性件,本发明解决了工业机器人抛光时产生的数据无法及时反馈到电脑上,使得整体叶盘的加工精度无法得到有效的提升。
技术研发人员:刘海山,李明范,孟爱华,倪敬,郑军强
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!