一种智能机器人零部件生产加工用预处理设备及使用方法与流程
本发明涉及机器人加工,具体涉及一种智能机器人零部件生产加工用预处理设备。
背景技术:
1、机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。机器人可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率质量,服务人类生活,扩大延伸人的活动及能力范围。
2、随着智能时代的发展,智能机器人开始应用与各种行业,在机器人零部件中机械手臂在生产中,由于其形状多为圆筒状,在对其打磨时通常从外部进行固定,而在对外部进行固定时往往会遮盖住机械手臂,从而会导致打磨不完整,往往还需要进行二次打磨操作,极其费时费力,故而提出一种智能机器人零部件生产加工用预处理设备来解决上述所提出的问题。
3、为了解决上述问题,本发明中提出了一种智能机器人零部件生产加工用预处理设备。
技术实现思路
1、本发明的目的在于克服现有技术中不便于对圆筒状零部件进行固定的问题,提供一种智能机器人零部件生产加工用预处理设备,以解决上述技术问题。
2、为了实现本发明的目的,本发明所采用的技术方案为:
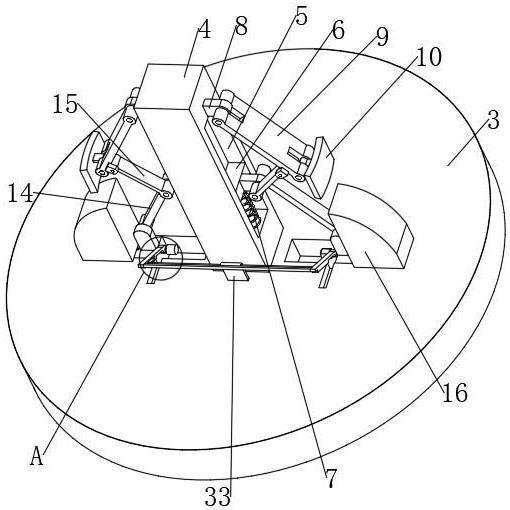
3、一种智能机器人零部件生产加工用预处理设备,包括底座,所述底座顶部设置有圆盘,圆盘顶部固定连接有定位杆,定位杆两侧均开设有导向槽,导向槽内滑动连接有导向块,导向块和导向槽底部内壁之间固定连接有同一个导向弹簧,圆盘顶部开设有两个呈两侧对称的第一滑槽,第一滑槽内滑动连接有第一滑块,第一滑块顶部固定连接有第二耳块,第二耳块和导向块之间转动连接有同一个第二连杆,定位杆两侧顶部均固定连接有第一耳块,第一耳块外侧转动连接有第一连杆,第一连杆外侧转动连接有弧形的压板,导向块和第一连杆之间转动连接有同一个第三连杆,第一滑块顶部设置有受力块,受力块外侧面为一弧面,受力块连接有调节机构,底座上设置有打磨机构。
4、优选地,所述底座顶部开设有安装槽,安装槽底部内壁固定连接有电机,电机输出轴和圆盘之间固定连接。
5、优选地,所述安装槽圆周内壁开设有环槽,环槽内滑动连接有圆环,圆环和圆盘之间固定连接。
6、优选地,所述打磨机构包括固定杆,固定杆固定连接于底座的顶部,固定杆一侧贯穿设置有活动杆,活动杆靠近圆盘的一侧固定连接有打磨板,活动杆另一侧固定连接有把手,活动杆连接有压紧机构。
7、优选地,所述压紧机构包括定向板,定向板固定连接于固定杆远离圆盘的一侧,定向板顶部开设有定向槽,定向槽内滑动连接有定向块,定向块和定向槽侧壁之间固定连接有同一个定向弹簧,定向块顶部固定连接有立柱,立柱和活动杆之间固定连接。
8、优选地,所述调节机构包括第二滑块,第一滑块顶部开设有第二滑槽,第二滑块滑动连接于第二滑槽内,第一滑块内侧转动连接有螺杆,螺杆和第二滑块螺纹连接,第二滑块和受力块之间固定连接。
9、优选地,所述螺杆上套设固定有螺母,底座上设置有助调机构。
10、优选地,所述助调机构包括第三耳块,第三耳块固定连接于底座的顶部,第三耳块上转动连接有连接轴,连接轴两侧均设置有扳手,两个扳手相对的一面均开设有导槽,导槽内滑动连接有导块,导块和连接轴之间固定连接,两个扳手之间固定连接有同一个握杆。
11、优选地,所述活动杆后端插接有插杆,插杆后端固定连接有收集箱,收集箱进料口处设置有凹陷部,凹陷部呈八字形。
12、将圆筒形零部件直接从定位杆的上方插入,当零部件的底部和两个导向块接触时,由于导向块的外侧面为弧面,导向块即可受到零部件的挤压力,导向块跟随第一滑块一起顺着第一滑槽向内移动,继而通过第二连杆推动导向块顺着导向槽向上移动,继而通过第三连杆推动第一连杆向上转动,即可通过压板对圆筒形零部件的内壁进行挤压,从而对其进行有效固定,从而避免对打磨形成遮挡,且压板截面为弧形,即可和零部件的内壁贴合紧密,从而提高对零部件的固定效果。
13、固定完毕后,启动电机,电机输出轴带动圆盘以及零部件转动,即可通过打磨板对零部件的外壁进行打磨,同时设置有定向弹簧,在定向弹簧的弹力作用下,使得活动杆和打磨板的整体保持和零部件的外壁贴紧,即可当打磨板使用后出现损耗时,仍保持和零部件处于贴紧状态,从而提高打磨板的使用周期,降低成本。
14、设置有调节机构,即可握住握杆进行移动,使得扳手套在螺母上,继而转动握杆,即可带动两个扳手同时转动,继而带动螺母和螺杆同时转动,在螺纹配合下,使得第二滑块和受力块一起,顺着第二滑槽进行移动,从而调节两个受力块之间的距离,从而可适用于对不同尺寸的圆柱形零部件进行固定,从而提高该设备的适用性。
15、设置有收集箱,即可当零部件转动进行打磨时,打磨产生的碎屑被甩向收集箱的进料口位置,继而进入到收集箱内进行收集,且收集箱和活动杆之间插接,即可便于将收集箱取下,对碎屑进行清理,收集箱的进料口处设置有凹陷部,凹陷部呈八字形,即可便于碎屑进入收集箱内,同时防止碎屑溢出。
技术特征:
1.一种智能机器人零部件生产加工用预处理设备,包括底座(1),其特征在于,所述底座(1)顶部设置有圆盘(3),圆盘(3)顶部固定连接有定位杆(4),定位杆(4)两侧均开设有导向槽(5),导向槽(5)内滑动连接有导向块(6),导向块(6)和导向槽(5)底部内壁之间固定连接有同一个导向弹簧(7),圆盘(3)顶部开设有两个呈两侧对称的第一滑槽(11),第一滑槽(11)内滑动连接有第一滑块(12),第一滑块(12)顶部固定连接有第二耳块(13),第二耳块(13)和导向块(6)之间转动连接有同一个第二连杆(14),定位杆(4)两侧顶部均固定连接有第一耳块(8),第一耳块(8)外侧转动连接有第一连杆(9),第一连杆(9)外侧转动连接有弧形的压板(10),导向块(6)和第一连杆(9)之间转动连接有同一个第三连杆(15),第一滑块(12)顶部设置有受力块(16),受力块(16)外侧面为一弧面,受力块(16)连接有调节机构,底座(1)上设置有打磨机构。
2.如权利要求1所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述底座(1)顶部开设有安装槽(2),安装槽(2)底部内壁固定连接有电机(17),电机(17)输出轴和圆盘(3)之间固定连接。
3.如权利要求2所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述安装槽(2)圆周内壁开设有环槽(18),环槽(18)内滑动连接有圆环(19),圆环(19)和圆盘(3)之间固定连接。
4.如权利要求1所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述打磨机构包括固定杆(20),固定杆(20)固定连接于底座(1)的顶部,固定杆(20)一侧贯穿设置有活动杆(21),活动杆(21)靠近圆盘(3)的一侧固定连接有打磨板(22),活动杆(21)另一侧固定连接有把手(23),活动杆(21)连接有压紧机构。
5.如权利要求4所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述压紧机构包括定向板(24),定向板(24)固定连接于固定杆(20)远离圆盘(3)的一侧,定向板(24)顶部开设有定向槽(25),定向槽(25)内滑动连接有定向块(26),定向块(26)和定向槽(25)侧壁之间固定连接有同一个定向弹簧(28),定向块(26)顶部固定连接有立柱(27),立柱(27)和活动杆(21)之间固定连接。
6.如权利要求1所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述调节机构包括第二滑块(30),第一滑块(12)顶部开设有第二滑槽(29),第二滑块(30)滑动连接于第二滑槽(29)内,第一滑块(12)内侧转动连接有螺杆(31),螺杆(31)和第二滑块(30)螺纹连接,第二滑块(30)和受力块(16)之间固定连接。
7.如权利要求6所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述螺杆(31)上套设固定有螺母(32),底座(1)上设置有助调机构。
8.如权利要求7所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述助调机构包括第三耳块(33),第三耳块(33)固定连接于底座(1)的顶部,第三耳块(33)上转动连接有连接轴(34),连接轴(34)两侧均设置有扳手(35),两个扳手(35)相对的一面均开设有导槽(36),导槽(36)内滑动连接有导块(37),导块(37)和连接轴(34)之间固定连接,两个扳手(35)之间固定连接有同一个握杆(38)。
9.如权利要求4所述的一种智能机器人零部件生产加工用预处理设备,其特征在于:所述活动杆(21)后端插接有插杆(40),插杆(40)后端固定连接有收集箱(39),收集箱(39)进料口处设置有凹陷部(41),凹陷部(41)呈八字形。
10.一种如权利要求1-9中任意一项所述的一种智能机器人零部件生产加工用预处理设备的工作方法,其特征在于:将圆筒形零部件直接从定位杆(4)的上方插入,当零部件的底部和两个导向块(6)接触时,由于导向块(6)的外侧面为弧面,导向块(6)即可受到零部件的挤压力,导向块(6)跟随第一滑块(12)一起顺着第一滑槽(11)向内移动,继而通过第二连杆(14)推动导向块(6)顺着导向槽(5)向上移动,继而通过第三连杆(15)推动第一连杆(9)向上转动,即可通过压板(10)对圆筒形零部件的内壁进行挤压,从而对其进行有效固定,从而避免对打磨形成遮挡,且压板(10)截面为弧形,即可和零部件的内壁贴合紧密,从而提高对零部件的固定效果,进一步的,固定完毕后,启动电机(17),电机(17)输出轴带动圆盘(3)以及零部件转动,即可通过打磨板(22)对零部件的外壁进行打磨,同时设置有定向弹簧(28),在定向弹簧(28)的弹力作用下,使得活动杆(21)和打磨板(22)的整体保持和零部件的外壁贴紧,即可当打磨板(22)使用后出现损耗时,仍保持和零部件处于贴紧状态,从而提高打磨板(22)的使用周期,降低成本,进一步的,设置有调节机构,即可握住握杆(38)进行移动,使得扳手(35)套在螺母(32)上,继而转动握杆(38),即可带动两个扳手(35)同时转动,继而带动螺母(32)和螺杆(31)同时转动,在螺纹配合下,使得第二滑块(30)和受力块(16)一起,顺着第二滑槽(29)进行移动,从而调节两个受力块(16)之间的距离,从而可适用于对不同尺寸的圆柱形零部件进行固定,从而提高该设备的适用性,进一步的,设置有收集箱(39),即可当零部件转动进行打磨时,打磨产生的碎屑被甩向收集箱(39)的进料口位置,继而进入到收集箱(39)内进行收集,且收集箱(39)和活动杆(21)之间插接,即可便于将收集箱(39)取下,对碎屑进行清理,收集箱(39)的进料口处设置有凹陷部(41),凹陷部(41)呈八字形,即可便于碎屑进入收集箱(39)内,同时防止碎屑溢出。
技术总结
本发明涉及一种智能机器人零部件生产加工用预处理设备,包括底座,所述底座顶部设置有圆盘,圆盘顶部固定连接有定位杆,定位杆两侧均开设有导向槽,导向槽内滑动连接有导向块,导向块和导向槽底部内壁之间固定连接有导向弹簧,圆盘顶部开设有两个呈两侧对称的第一滑槽,第一滑槽内滑动连接有第一滑块,第一滑块顶部固定连接有第二耳块,第二耳块和导向块之间转动连接有第二连杆,定位杆两侧顶部均固定连接有第一耳块,第一耳块外侧转动连接有第一连杆,第一连杆外侧转动连接有压板,导向块和第一连杆之间转动连接有第三连杆,第一滑块顶部设置有受力块;本发明利用零部件向下插入的动作,即可驱使压板对其内壁进行固定。
技术研发人员:穆青景
受保护的技术使用者:穆青景
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!