一种机器人自适应曲面打磨抛光工具
本发明所涉及是曲面零部件的打磨及抛光技术,具体涉及一种机器人自适应曲面打磨抛光工具。
背景技术:
1、对工件打磨在工厂应用中极为广泛,随着现代科学技术的飞速发展,利用工业机器人对工件打磨逐渐代替了传统人工打磨,机器人打磨可以保持恒力高效率。在对一些表面较大的曲面零部件,比如汽车引擎盖、飞机壳体、各种大型机器外壳等零部件进行作业如打磨时,由于传统打磨头只有单独的一个平面打磨头,其在打磨时与曲面间始终为一条线接触,进而其加工的面积仅为一条宽度很窄的面,这导致传统打磨头在加工较大表面曲面物体时,打磨头需要来回运动,其路径规划较长,打磨时间长效率低。为此,本专利提出一种由三个打磨头并联而形成的新型打磨头,其对曲面打磨有着较高的效率,且对曲面打磨精度有所提高,对曲面打磨速度大幅提高。
技术实现思路
1、为克服现有单打磨头打磨效率低、打磨精度差、对工件适应性差的缺点,本发明提供一种机器人自适应曲面打磨抛光工具,能够根据被加工曲面物体的曲率半径以及面积大小去合理调节三个打磨头相互位置及姿态,使打磨头可以更高效地对曲面进行打磨。
2、本发明的具体技术方案如下:一种机器人自适应曲面打磨抛光工具,包括圆柱形壳体1、聚散机构2、摆动机构3和两个以上的打磨盘4,聚散机构2、摆动机构3布置在壳体1内,每个打磨盘4均伸出壳体1的下端,每个打磨盘4的下端面为凸曲面,两个以上的打磨盘4沿着壳体1的同一圆周方向布置;
3、所述聚散机构2包括电机21、丝杠螺母副22、聚散导轨架23和副聚散导轨架24,所述丝杠螺母副22的丝杆221竖直布置,所述电机21固定安装,且电机21的输出轴通过联轴器211连接着丝杆221的下端,丝杠螺母副22的螺母座222下端设有连接盘25,且连接盘25和壳体1同轴布置;
4、聚散导轨架23和副聚散导轨架24依次水平布置在所述连接盘25的下方,且结构相同,均包括水平布置的聚散圆环和均匀布置在聚散圆环外圆周上的两个以上聚散滑轨,聚散圆环和连接盘25同轴布置,每个聚散滑轨沿着聚散圆环的径向水平布置,
5、聚散导轨架23固定安装,聚散导轨架23的每个聚散滑轨上滑动配合设有聚散滑块26,且每个聚散滑块26的一端铰接有上聚散连杆27,另一端铰接有下聚散连杆28,下聚散连杆28和打磨盘4一一对应,使得每个上聚散连杆27的上端和连接盘25对应铰接连接,每个下聚散连杆28的下端和打磨盘4的中部铰接;
6、所述摆动机构3包括两个以上竖直布置的摆动滑轨31、螺纹盖32和螺纹推杆架33,所述螺纹盖32同轴设于壳体1的上端,螺纹推杆架33包括上端套环和均匀设于套环圆周方向的两根以上的竖直推杆,螺纹盖32和套环螺纹配合,使得每根竖直推杆周向转动限位,并和副聚散导轨架24对应固定连接;
7、每个所述摆动滑轨31竖向布置,且摆动滑轨31和下聚散连杆28一一对应固定连接,每个摆动滑轨31上滑动配合设有摆动滑块34,摆动滑块34和副聚散导轨架24的聚散滑轨一一对应,且摆动滑块34通过副聚散滑块29滑动配合设于副聚散导轨架24的聚散滑轨上,
8、摆动滑块34和摆动连杆35一一对应,且摆动滑块34通过转轴36和摆动连杆35的上端铰接,摆动连杆35的下端和打磨盘4铰接;
9、使用时,启动电机21,通过丝杠螺母副22带动连接盘25上下移动,使得聚散滑块26在对应聚散滑轨上滑动,下聚散连杆28带动打磨盘4沿着壳体1的径向运动,实现两个以上的打磨盘4的聚散;旋转螺纹盖32,螺纹推杆架33带动副聚散导轨架24上下移动,使得副聚散滑块29带动摆动滑块34在摆动滑轨31上运动,实现每个打磨盘4的上下摆动。
10、进一步,所述连接盘25的外圆周上均匀铰接有3个上聚散连杆27,所述聚散导轨架23和副聚散导轨架24的聚散圆环外圆周上分别均匀且对应设有3个聚散滑轨;
11、包括3个打磨盘4,每个打磨盘4的中部铰接连接着对应的下聚散连杆28下端,每个打磨盘4靠近所述壳体1的中心轴一侧铰接连接着对应的摆动连杆35下端。
12、进一步,每个聚散滑轨的中部镂空,两侧分别开设有滑槽,每个聚散滑块26的两端分别开设有轴孔,聚散滑块26的中部两侧向外凸起,凸起和滑槽配合,使得聚散滑块26滑动配合位于对应的聚散滑轨上;
13、每个聚散滑块26的一端通过轴孔和销轴的配合铰接连接着对应上聚散连杆27的下端,每个聚散滑块26的另一端通过轴孔和销轴的配合铰接连接着对应下聚散连杆28的上端。
14、进一步,所述聚散导轨架23的聚散圆环直径小于副聚散导轨架24的聚散圆环直径,使得下聚散连杆28竖向穿过副聚散导轨架24的对应聚散滑轨的镂空部。
15、进一步,每个所述摆动滑轨31为直立的矩形块,且中部镂空、每侧分别开设有矩形孔;
16、每个所述摆动滑块34的中部固定插设有水平的转轴36,摆动滑块34滑动配合位于摆动滑轨31内,使得转轴36的两端伸出摆动滑轨31,并对应固定连接有副聚散滑块29,副聚散滑块29滑动配合位于副聚散导轨架24的对应聚散滑轨上。
17、进一步,所述壳体1内固定设有下支撑架13;
18、下支撑架13包括圆形安装板和两个以上的水平定位板,圆形安装板同轴布置在聚散导轨架23的聚散圆环和副聚散导轨架24的聚散圆环之间,每个水平定位板一端和圆形安装板的外圆周固定连接,另一端和壳体1固定连接;
19、每个竖直推杆为矩形立柱,水平定位板和竖直推杆一一对应布置,水平定位板上开设有矩形孔,竖直推杆通过矩形孔竖向贯穿对应水平定位板,使得每根竖直推杆周向转动限位,每根竖直推杆的下端通过倒u形卡块331和副聚散导轨架24的聚散圆环对应固定连接。
20、进一步,所述圆形安装板的下端和所述电机21的上端固定连接,圆形安装板的上端通过支板和聚散导轨架23的聚散圆环固定连接。
21、进一步,所述壳体1内固定设有上支撑架14,上支撑架14包括定位圆环和两个以上的定位连接板,定位圆环同轴布置在螺纹盖32和螺纹推杆架33的上端套环之间,每个定位连接板的一端和定位圆环固定连接,另一端和壳体1固定连接。
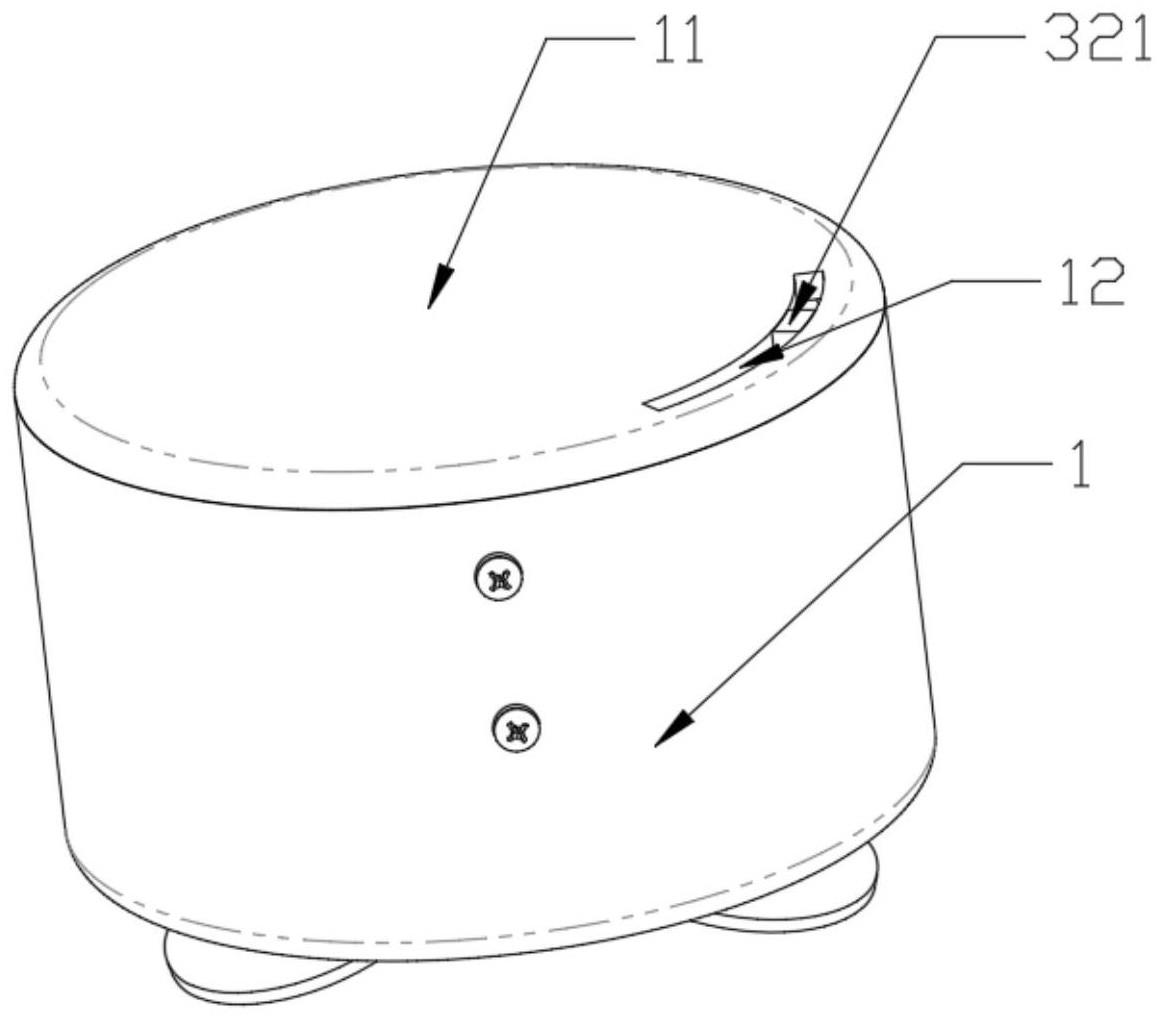
22、进一步,所述壳体1的上端盖11开设有弧形槽12,螺纹盖32的外圆周上设有l形调节板321,l形调节板321的竖直部通过弧形槽12穿出壳体1的上端,通过转动l形调节板321的竖直部,使得螺纹盖32旋转并带动螺纹推杆架33上下移动。
23、进一步,所述螺纹盖32包括圆形盖板,盖板的上端设有定位圆环,盖板的下端设有定位凸台,定位凸台的下端设有连接螺纹柱,定位圆环和所述壳体1的上端盖11的定位环槽配合,定位凸台和所述上支撑架14配合套设,使得连接螺纹柱和螺纹推杆架33的套环螺纹连接,实现螺纹盖32旋转并带动螺纹推杆架33上下移动。
24、本发明的有益技术效果如下:本发明的一种机器人自适应曲面打磨抛光工具,两个以上的打磨盘为并联关系,根据打磨接触点区域拟合出可以进行打磨的曲面的曲率半径范围,通过将打磨盘的聚散及摆动两种运动结合起来,可以自由且适当地调节打磨盘组拟合的打磨曲率半径,进而更合理地对凸出曲面以及凹陷曲面进行打磨或抛光作业,具体的将两个以上的打磨盘的中心所在圆的直径作为聚散度指标参数,将两个以上的打磨盘沿其中线到分布中心连线方向的摆动角度作为摆动幅度参数。
25、通过聚散机构及摆动机构,自由合理地调节聚散度和摆动幅度,可以根据待打磨工件凹凸状况以及曲率半径去更好地对其打磨,在加工曲面物体时,预先调节好打磨盘相对位姿,使每个打磨盘都与曲面工件有一个点接触,这样电机带动打磨抛光工具整体旋转,可以使打磨抛光工具加工的部位接触宽度为两个以上接触点所在圆的直径,使用本发明的打磨抛光工具实现高效率、高精度地对曲面进行打磨。
- 还没有人留言评论。精彩留言会获得点赞!