一种智能抛光装置和方法与流程
本发明涉及基于抛光机,尤其涉及一种智能抛光装置和方法。
背景技术:
1、在抛光过程中,表面粗糙度是指加工表面所具有的较小间距和微小峰谷不平度,划痕是工件在加工过程中由于磨粒压入工件过深产生的表面缺陷。表面粗糙度和划痕是抛光样品表面质量评价主要考虑的因素。
2、传统抛光技术的改进一般在磨粒材料、抛光速度控制、抛光力大小控制等方面进行技术优化,以达到对被抛光材料粗糙度的精确控制。现代制造业的发展对表面精密加工提出了更高的要求。作为制造业的重要工艺手段——抛光工艺在较大程度上影响产品的使用性能。
3、化学机械抛光技术几乎是迄今唯一可以提供全局平面化的表面精加工技术,可广泛用于集成电路芯片、计算机硬磁盘、微型机械系统(mems)、光学玻璃等表面的平整化等。磁流变抛光利用磁流变液良好的动力学和温度特性,能够获得质量很高的光学表面,易于实现计算机控制,能够得到比较复杂的面形,且去除效率高。气囊抛光技术采用内置电机驱动抛光头旋转,控制头部的柔性气囊气压,其抛光工具工作面的柔性可根据被抛光曲面的曲率和粗糙度进行气压调控,工具气囊所支撑的柔性抛光工作面可与被抛光曲面形成较大面积的仿形接触,保证较大接触面和良好的接触吻合度。激光抛光技术作为一种非接触式抛光技术,可解决传统抛光技术带来微小刮痕、难以对微器件进行加工的弊端。
4、根据不同抛光技术的抛光机制,抛光样品的粗糙度控制可以通过固态、液态的抛光介质的粒度大小、电流以及磁流的大小、抛光垫的压力大小、激光的强弱等进行控制。其中较为常用的一般通过控制抛光时间来控制样品粗糙度,例如,可设置某种磨粒材料使用的抛光时长,待器件工作至某个时间点即停止抛光。由于抛光过程中,使用同种抛光磨粒材料,达到一定抛光时长后,该样品粗糙度便再难下降,因此该种方法不能精确判断样品抛光粗糙度的时变特性,存在抛光时间长、难以控制最优抛光停止时间的弊端。且不同抛光样品的抛光特性不同,最优抛光时长也不同。
5、在研磨机、研具、磨料和研磨液均选定的条件下,研磨速度、研磨压力和研磨液流量为超精密研磨和抛光加工过程中可以控制的主要工艺参数,是保证加工质量和加工效率的关键,这三个因素可作为实时优化和智能控制的主要对象。然而,当压力增大到一定值时,由于磨粒破碎及研磨接触面积增加,实际接触点的接触压力不成正比增加,研磨效率提高并不明显。同样,在精加工阶段,过大的流量同样会造成对表面精度的破坏。因此,基于粗糙度监测的抛光机制,能精确控制研磨、抛光时间,对优化研磨、抛光效果有关键作用。
6、目前的技术中,样品的抛光形状、粗糙度等目前已经实现了控制,然而目前的技术较多采用基于显微、放大功能的人工监测方式来获得某个时间点的样品抛光粗糙度,较少关注不同研磨机制下抛光过程中样品粗糙度的动态变化过程。
7、采用显微镜等方法进行抛光样品粗糙度观测的方法一方面需要对不同样品进行焦距调整,一方面无法获取样品表面精确的平整度数据。目前缺少一种在抛光过程中实现实时粗糙度实时测算以及监控的装置及方法。
8、再者,传统抛光设备在抛光过程中,无法有效对材料粗糙度实时监控,抛光效率和抛光粗糙度的精确性较低。因此,本发明提出的智能抛光装置和方法可实现对抛光样品实时的粗糙度测算以及监控。
技术实现思路
1、为克服上述的技术问题,本发明提供了一种智能抛光装置、方法及系统,可同时获取样品表面粗糙度的分布数据以及划痕的数量和位置,获得粗糙度分布数据及划痕的根本方法是获得抛光样品表面的深浅程度及其分布。
2、本发明解决技术问题的一种技术方案是提供一种智能抛光装置,包括:样品抛光台用于放置样品,且可带动样品旋转;
3、可旋转光源探测器阵列包括光源和探测器,其中光源用于产生不同方向的光照射样品进行扫描,探测器用于接收反射回来的光信号;
4、控制器分别与探测器和显示器电连接,控制器用于接收探测器反馈信息,并计算样品粗糙度,显示屏用于显示控制器的计算结果;
5、上工作盘可活动于样品抛光台的上方,用于对样品进行抛光打磨。
6、如图1所示,上工作盘1导入抛光液,对样品进行打磨抛光处理,样品台2用于放置样品,并控制样品的转速;可旋转光源探测器阵列3产生不同方向的光,对样品进行扫描并接收反射光信息,显示屏及控制器4用于计算样品粗糙度并进行存储、显示,抛光机箱体5内置电源、控制器核心部件,对装置进行控制;旋转轴6用于带动上工作盘1;光源发出的光功率p与探测器接收的最低功率pmin之间的关系为:p ≥ k*pmin,k为大于1的系数;根据探测器的灵敏度和不同样品的反射率的变化情况,光源发出的功率p应满足探测器所需最低功率pmin的要求,以提高探测接收的信噪比。样品的旋转速度应与探测器获取调制光波的响应时间匹配,实时获得精确的粗糙度扫描结果;探测器响应时间为s0,样品的转速mt为r/s,则样品在2次扫描间隔时间内的旋转线长l为l=ms0;l的大小可取决于系统设定的粗糙度扫描的精度,转速m固定的情况下,l越小,扫描精度越高。
7、本发明解决技术问题的另一种技术方案:提供一种智能抛光方法,具体包括:
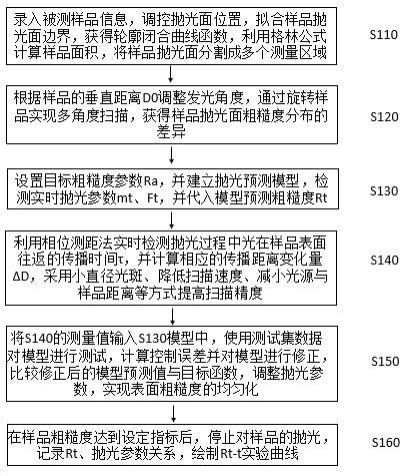
8、s110初始化:初始化设备,将抛光样品放置于样品抛光台,录入被测样品信息,调控样品的抛光面在样品抛光台的平面位置,拟合样品的抛光面边界,获得轮廓闭合曲线函数 f(x,y)=0;定义轮廓闭合曲线函数 f(x,y) 在抛光面边界范围 r 内;利用格林公式计算样品的面积 s为:,将样品抛光面分割成b个测量区域;
9、在上述公式中,s代表样品的面积,r为样品抛光面的边界范围,和分别代表样品抛光面在x方向和y方向上的导数,dxdy代表面积元素在x和y方向上的变化量。
10、s120获取样品粗糙度分布情况:可旋转光源探测器阵列根据样品实际垂直距离d0调整发光角度;发射的光与样品表面入射角设为α,通过旋转样品实现多角度扫描,获得样品的抛光面粗糙度分布的差异;收集抛光数据:样品转速mt、抛光力ft,可旋转光源探测器阵列转速n与样品粗糙度r数据;将收集的抛光数据随机分为两部分:80%为训练集,20%为测试集;
11、在本技术的一些实施例中,基于前述方案,所述多个光源以及探测器组成的可旋转光源探测器阵列可在一个方向上进行粗糙度扫描;之后移动光源并记录探测器检测到的样品表面高度变化,获得另一个方向上的粗糙度扫描结果;之后旋转样品至新位置,获得抛光面区域范围内的连续扫描结果,以及样品表面粗糙度分布图案;
12、s130 建立模型:设置目标粗糙度,在同一抛光液和样品条件下,检测抛光参数抛光时间t、实时转速mt和抛光力ft,输出变量为预测粗糙度ra;使用训练集数据,将收集数据分为训练集和测试集,在训练集构建多项式回归模型:rt(t) = ω1*a1*mt + ω2*a2*ft +ω3*a3*mt^2 + ω4*a4*ft^2 + ω5*a5*mt*ft,其中ω1-ω5为变量权重,a1-a5为模型系数;将线性回归模型映射到高维特征空间,通过核函数转化为非线性模型;构建神经网络结构,输入层为抛光参数,输出层为预测粗糙度rt,设计隐藏层节点数;将非线性回归模型作为子模块接入,通过误差反向传播算法训练网络模型调节权重参数,在测试集上评估模型预测性能,得到预测模型;检测实时抛光参数,并代入模型预测粗糙度rt;
13、在本技术的一些实施例中,基于前述方案,所述建立模型,包括:设置目标粗糙度参数ra;ra表示加工表面微小峰谷的算术平均值,其计算公式为:ra = (1/lz)∑|a| 其中,lz为取样长度,a为各取样位置的表面高度值;通过可旋转光源探测器阵列扫描,获取各位置a值,计算不同局部区域的ra;计算所有ra的平均值,作为样品整体的目标粗糙度ra;建立抛光预测模型:rt(t) = ω1*a1*mt + ω2*a2*ft + ω3*a3*mt^2 + ω4*a4*ft^2 + ω5*a5*mt*ft,其中ω1-ω5为变量权重,a1-a5为模型系数;检测实时抛光参数mt、ft,并代入模型预测粗糙度rt;
14、s140自动监测:利用相位测距法实时检测抛光过程中光在样品表面往返的传播时间,并计算相应的传播距离变化量δd;设定阈值δd_th表示允许的最大传播距离变化量;监测的时间间隔设定为0.1-1秒,如果测得δd>δd_th,则说明样品表面粗糙度超出允许范围,则暂停当前抛光过程;采用光斑直径10-100μm,提高监测精度;在样品表面扫描采集b个测量区域的测量数据;将b个小区域采集的数据进行整合,计算实时检测样品表面的粗糙度rt’;
15、在本技术的一些实施例中,基于前述方案,所述自动监测,包括:使用相位测距法可以获得测试距离公式: l = (nλ+δφ/2π)/2nkf,其中λ为光在真空中的传播速度,n为大气折射率,f为光的调制频率,δφ为相位差,k为仪器常数;根据测试距离l计算传播距离变化量δd;设置允许变化阈值δd_th,设置允许变化阈值δd_th,比较δd与δd_th的大小关系;如果δd大于δd_th,则暂停当前抛光,进入反馈调节阶段,保证粗糙度控制在范围内;当δd小于等于δd_th时,完成抛光过程;采用小直径光斑d、降低扫描速度v、并减小光源与样品距离l0,以提高扫描精度;保证相邻光斑的非相干性: l0 ≥ d^2/λ;设置扫描步长l1:l1 = λ/2na,其中na为数值孔径。
16、s150修正模型并抛光:使用测试集数据对模型进行测试,将rt’与模型预测值rt进行比较,计算控制误差e = rt' - rt;如果控制误差e超出允许范围,则暂停当前抛光过程;对模型进行修正:rt'' = rt + kp*e + ki*∫e dt,kp和ki是控制算法中的比例和积分增益参数,dt是时间间隔,rt''是修正后的模型预测值,比较rt''与rt(t),调整抛光参数;比较rt''与目标函数rt(t),调整mt或ft,直到达到模型预测值rt''与目标值rt(t)之差小于预设阈值ε为止;如果局部区域ra偏差过大,则需要调整抛光力ft的分布,实现样品表面粗糙度的均匀化;
17、s160数据处理和报告生成:在样品粗糙度达到设定指标后,停止对样品的抛光,记录rt、抛光参数关系,绘制rt-t实验曲线。
18、本发明的有益效果:
19、采用可旋转的光源-探测器阵列实现多角度扫描和调制光波匹配,应用相位测距法进行实时监测,实现了抛光过程的闭环控制;
20、通过机器学习建立精确的预测模型,实现抛光参数的主动优化。
- 还没有人留言评论。精彩留言会获得点赞!