基于五轴协作机器人的打磨装置的制作方法
本技术涉及机器人,尤其涉及一种基于五轴协作机器人的打磨装置。
背景技术:
1、打磨是汽车零件、五金塑料、厨卫洁具、家具家电、消费品等制造行业中的重要环节,传统人工操作存在效率低、质量不稳定等问题。为了提高生产过程的自动化、智能化和数字化程度,采用协作机器人进行打磨可有效提升打磨质量和效率。目前,打磨机器人工作站大多采用六轴垂直串联协作机器人,自由度多、灵活性高、速度慢,可进行空间任意位置和姿态的打磨作业但成本较高,同时由于六轴协作机器人通常采用3个驱动关节串联组成腕部结构,导致末端体积大、重量大、惯量大、速度慢等缺陷;也有部分采用龙门型或水平关节型三轴机器人,自由度少、灵活性差、速度快、成本低,但仅适用单个方向打磨作业。另外,在打磨过程中还存在工件多个表面的打磨力度不均匀、恒定,导致打磨效果不理想。
技术实现思路
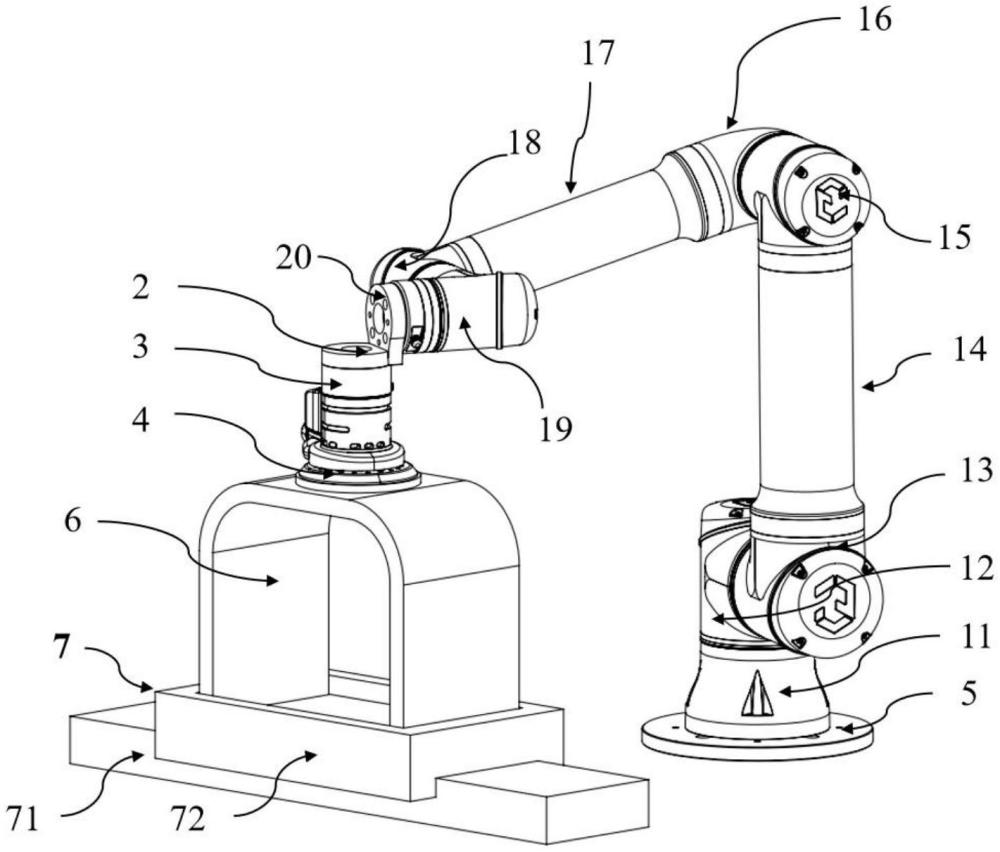
1、为了解决上述问题,本实用新型提供了一种基于五轴协作机器人的打磨装置,包括:协作机器人,所述协作机器人包括依次连接设置的基座、第一旋转关节、第二旋转关节、第一连杆、第三旋转关节、转接头、第二连杆、第四旋转关节、第五旋转关节;所述第五旋转关节的输出法兰端连接有工具法兰;打磨机构,所述打磨机构通过连接结构与所述工具法兰的输出法兰端连接;六维力传感器,所述六维力传感器配置于所述打磨机构上方,与所述工具法兰的输出法兰端连接,用于测量协作机器人末端与工件打磨面的各向接触力进行打磨。
2、本实用新型提供的基于五轴协作机器人的打磨装置,相较于通常使用的六轴协作机器人减少了一个腕部关节,既降低了机器人成本,也使其腕部结构简单紧凑、整体刚度提高,同时能够进行空间任意位置和姿态的打磨作业。同时,该模块化打磨装置能够连续进行工件多个表面的恒力打磨连续作业。
技术特征:
1.一种基于五轴协作机器人的打磨装置,其特征在于,包括:
2.根据权利要求1所述的打磨装置,其特征在于,所述打磨机构的转轴与所述协作机器人的第五旋转关节的转轴垂直设置。
3.根据权利要求1所述的打磨装置,其特征在于,所述基座下方设有基座固定板,用于将协作机器人固定在工作台上。
4.根据权利要求3所述的打磨装置,其特征在于,所述工作台上还设有工件输送装置,用于输送所述工件进行打磨。
5.根据权利要求4所述的打磨装置,其特征在于,所述工件输送装置包括固定滑轨,所述固定滑轨上设有滑动块,所述滑动块与所述工件固定连接。
6.根据权利要求1所述的打磨装置,其特征在于,还包括与工作台固定连接的支架,所述支架上固定连接有状态显示屏,用于显示工作站的状态信息和操作界面。
7.根据权利要求6所述的打磨装置,其特征在于,所述支架上还固定连接有定位视觉采集装置。
8.根据权利要求3所述的打磨装置,其特征在于,所述工作台底部设有若干个万向轮。
技术总结
本技术公开了一种基于五轴协作机器人的打磨装置,包括:协作机器人,所述协作机器人包括依次连接设置的基座、第一旋转关节、第二旋转关节、第一连杆、第三旋转关节、转接头、第二连杆、第四旋转关节、第五旋转关节;所述第五旋转关节的输出法兰端连接有工具法兰;打磨机构,所述打磨机构通过连接结构与所述工具法兰的输出法兰端连接;六维力传感器,所述六维力传感器配置于所述打磨机构上方,与所述工具法兰的输出法兰端连接,用于测量协作机器人末端与工件打磨面的各向接触力进行打磨。
技术研发人员:孟峰立,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20230731
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!