一种机台真空机械手臂的位移侦测装置的制作方法
本技术涉及半导体机台,尤其涉及一种机台真空机械手臂的位移侦测装置。
背景技术:
1、化学气相沉积(chemical vapor deposition,简称cvd),cvd是一种用来产生纯度高、性能好的固态材料的化学技术,典型的cvd制程是将晶圆暴露在一种或多种不同的前驱物下,在一定工艺温度下,在基底表面发生化学反应或/及化学分解来产生欲沉积的薄膜。反应过程中通常也会伴随地产生不同的副产品,但大多会会随着气流被带着,而不会留在反应腔中。对于任何一种cvd产品,晶圆(wafer)的传输技术都是十分关键的技术之一。现有技术中通常使用真空机械手臂转运待加工晶圆,例如机械手将晶圆从进片腔传送至反应腔中,成膜结束后,再将晶圆从反应腔传送至出片腔,然而在真空机械手臂从进出片腔内抓取、移动晶圆过程中,机械手臂在竖直方向容易发生偏移,然而微小的偏移也会导致真空手臂划伤晶圆,从而最终导致晶圆报废或破碎。
2、因此,现有技术中需要一种机台真空机械手臂的位移侦测装置。
技术实现思路
1、有鉴于此,本实用新型实施例的目的在于提出一种机台真空机械手臂的位移侦测装置,在机械手臂抓取晶圆移动的过程中自动监测其在竖直方向的位置,并配备有报警装置,实现对真空机械手臂的位移监测,防止晶圆被划伤。
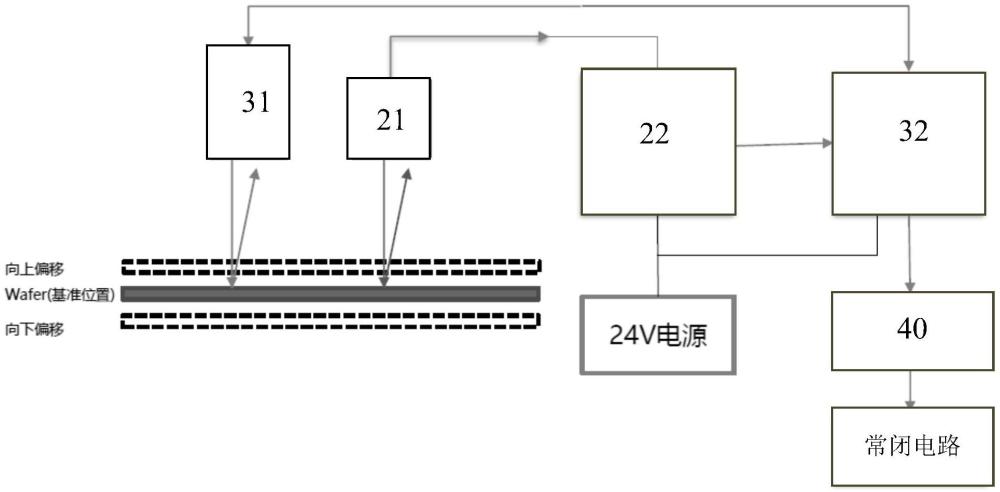
2、基于上述目的,本实用新型实施例的提供了一种机台真空机械手臂的位移侦测装置,包括:
3、电池模块;
4、晶圆侦测模块,晶圆侦测模块包括电连接的第一激光器和第一控制器,第一激光器设置在机台的进出片腔的顶部,向晶圆放置平面连续发射激光;
5、位置侦测模块,位置侦测模块包括电连接的第二激光器和第二控制器,第二控制器与第一控制器通信连接以获取晶圆位置信号,第二激光器设置在机台的进出片腔顶部,第二控制器基于晶圆位置信号触发第二激光器工作,第二激光器工作时向晶圆放置平面发射激光以量测晶圆在竖直方向的实时位移;
6、警报模块,警报模块配置于设置位移阈值,响应于实时位移超出位移阈值进行报警。
7、在一些实施方式中,还包括:显示模块,显示模块与第一控制器、第二控制器以及警报模块连接以显示侦测信息。
8、在一些实施方式中,侦测信息包括:晶圆是否到达进出片腔内的指定位置、位移阈值、以及晶圆在竖直方向的实时位移。
9、在一些实施方式中,警报模块通过常闭电路与机台连接,响应于实时位移超出位移阈值进行报警,并将常闭电路调整为断开状态以自动停止真空机械手臂操作。
10、在一些实施方式中,位移阈值设定为在竖直方向上与晶圆基准位置偏移±1mm。
11、在一些实施方式中,警报模块配置有蜂鸣器。
12、在一些实施方式中,电池模块为24v电池。
13、在一些实施方式中,在进出片腔的顶部,第一激光器设置在靠近晶圆首次进片的位置,第二激光器设置在靠近真空机械手臂的位置。
14、本实用新型至少具有以下有益技术效果:
15、本实用新型提供了一种真空机械手臂的位移侦测装置,通过晶圆侦测模块获取晶圆位置并通知位置侦测模块,通过位置侦测模块实现对机械手臂抓取晶圆并移动过程中的位移自动监控,位置侦测模块的激光器被触发后向晶圆平面发射激光以量测激光器与晶圆之间的竖直距离,当侦测到竖直距离有变化,即相比于基准位置产生位置,则通过警报模块实时警报提醒技术人员检查机台,本装置实现了对真空机械手臂在竖直方向位移的监测,有效避免晶圆损伤。
技术特征:
1.一种机台真空机械手臂的位移侦测装置,其特征在于,包括:
2.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,还包括:显示模块,所述显示模块与所述第一控制器、第二控制器以及警报模块连接以显示侦测信息。
3.根据权利要求2所述的机台真空机械手臂的位移侦测装置,其特征在于,所述侦测信息包括:晶圆是否到达进出片腔内的指定位置、位移阈值、以及晶圆在竖直方向的实时位移。
4.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,所述警报模块通过常闭电路与机台连接,响应于所述实时位移超出所述位移阈值进行报警,并将常闭电路调整为断开状态以自动停止真空机械手臂操作。
5.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,所述位移阈值设定为在竖直方向上与晶圆基准位置偏移±1mm。
6.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,所述警报模块配置有蜂鸣器。
7.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,所述电池模块为24v电池。
8.根据权利要求1所述的机台真空机械手臂的位移侦测装置,其特征在于,在所述进出片腔的顶部,所述第一激光器设置在靠近晶圆首次进片的位置,所述第二激光器设置在靠近真空机械手臂的位置。
技术总结
本技术公开了一种机台真空机械手臂的位移侦测装置,包括电池模块、晶圆侦测模块、位置侦测模块以及警报模块,晶圆侦测模块包括电连接的第一激光器和第一控制器,第一激光器设置在机台的进出片腔的顶部,向晶圆放置平面连续发射激光;位置侦测模块包括电连接的第二激光器和第二控制器,第二控制器与第一控制器通信连接以获取晶圆位置信号,第二激光器设置在机台的进出片腔顶部,第二控制器基于晶圆位置信号触发第二激光器工作,第二激光器工作时向晶圆放置平面发射激光以量测晶圆在竖直方向的实时位移。本装置通过侦测模块对晶圆移动过程进行自动监测,进一步实现了对真空机械手臂的位移监测,防止晶圆被划伤。
技术研发人员:陈保栋,张耀林,陈露,袁彬
受保护的技术使用者:和舰芯片制造(苏州)股份有限公司
技术研发日:20231008
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!