一种六轴打磨机器人的制作方法
本发明涉及打磨机,具体为一种六轴打磨机器人。
背景技术:
1、六轴机械手具有高度的灵活性和可编程性,可以用于精密加工任务,如切割、打磨、钻孔和焊接等,六轴打磨机器人带动打磨器,从铸件四周以及任意角度的位置进行自动化打磨作业工艺,六轴机器人由基座轴、肩关节轴、肘关节轴、腕关节1轴、腕关节2轴和腕关节3轴组成,基座轴的旋转运动使机器人能够在水平平面上进行旋转,肩关节轴的旋转运动使机器人能够在垂直平面上进行旋转,肘关节轴的旋转运动使机器人能够在垂直平面上进行弯曲,腕关节1轴的旋转运动使机器人能够在水平平面上进行旋转,腕关节2轴的旋转运动使机器人能够在垂直平面上进行旋转,腕关节3轴的旋转运动使机器人能够在水平平面上进行旋转,通过这六个轴的组合运动,六轴机器人能够实现多角度打磨操作,使其具备了在三维空间内灵活运动和操作的能力;
2、但是,在打磨过程中,打磨轮工作时产生的碎屑飞溅至轴缝隙中,碎屑与润滑油结合后凝固,则会影响轴转动,若直接在打磨轮侧边固定保护盖,保护盖容易与工件发生抵触从而影响打磨操作,为此,我们提出一种六轴打磨机器人。
技术实现思路
1、本发明的目的在于提供一种六轴打磨机器人,以解决上述背景技术中提出的打磨轮工作时产生的碎屑飞溅至轴缝隙中,碎屑与润滑油结合后凝固,则会影响轴转动,若直接在打磨轮侧边固定保护盖,保护盖容易与工件发生抵触从而影响打磨操作的问题。
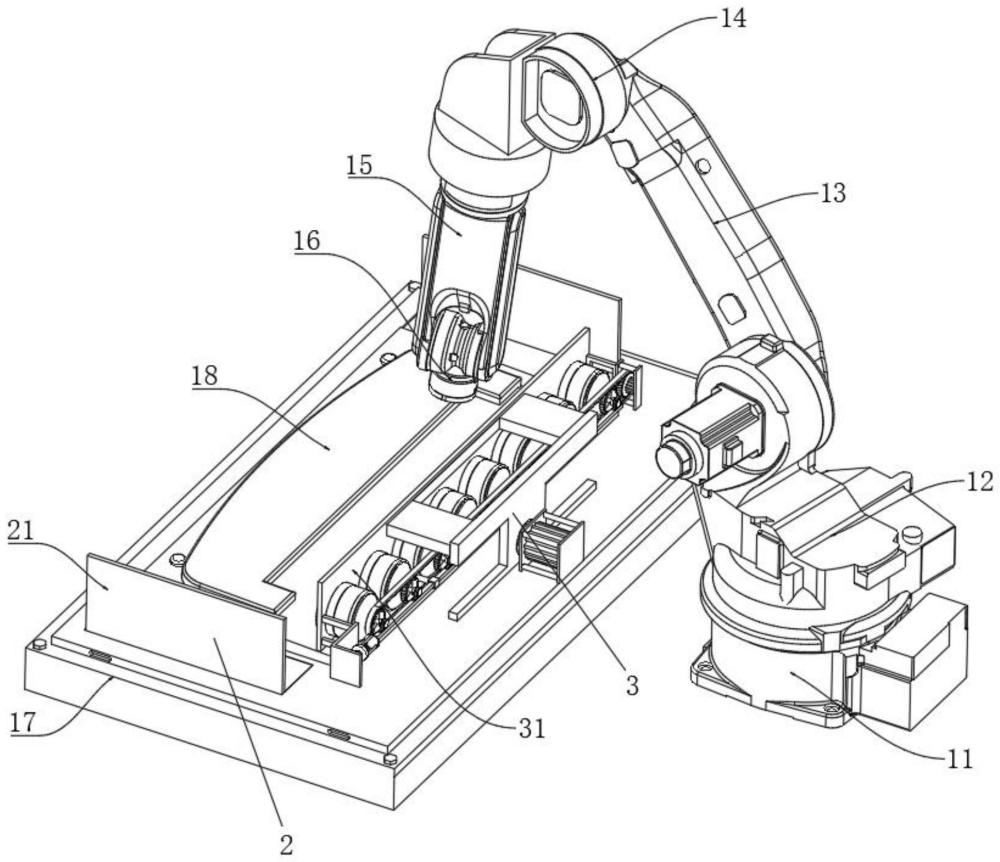
2、为实现上述目的,本发明提供如下技术方案:一种六轴打磨机器人,包括:基座轴,基座轴的顶部依次连接有肩关节轴、肘关节轴、腕关节轴一、腕关节轴二以及打磨器,打磨器的底部设置有夹持座,且夹持座的表面放置有工件;
3、还包括:防护组件一,防护组件一设置在工件的两侧,打磨器工作时,控制器同步控制防护组件一工作,通过防护组件一对打磨空间两侧的碎屑进行遮挡;
4、防护组件二,防护组件二设置在夹持座的顶部,腕关节轴一转动时,控制器同步控制防护组件二工作,通过防护组件二跟随打磨器同步移动,使得防护组件二贴近打磨器并对碎屑进行遮挡,避免碎屑飞溅至轴间隙中;
5、吸屑组件,吸屑组件设置在防护组件二内部,通过吸屑组件吸取碎屑以及高温并进行旋转收集,吸屑组件通过传动组件进行驱动;
6、磁吸组件,磁吸组件设置在吸屑组件的内部,通过磁吸组件的磁性配合吸屑组件利于碎屑的吸附收集,磁吸组件通过驱动组件进行驱动。
7、其中,防护组件一包括设置在工件两侧的护板一,且护板一底部靠近工件的一侧固定有挡板,挡板靠近工件的一端插设在夹持座的内部,护板一的底部螺纹连接有螺杆一,螺杆一的一端与夹持座内壁活动连接,螺杆一的另一端与电机一的输出轴固定连接,电机一的端面固定在夹持座的内壁。
8、其中,防护组件二包括贴合在夹持座表面的护板二,且护板二靠近基座轴的一侧固定有连接架一,连接架一的表面与气缸的伸缩杆固定连接,气缸的底部固定在夹持座的表面。
9、其中,吸屑组件包括固定在护板二内部的固定架一,且固定架一的内部设置有扇叶,扇叶远离工件的一侧固定有收屑罩,且收屑罩的端面通过转环连接有集屑罩,集屑罩远离工件一端的外壁固定有齿轮一。
10、其中,收屑罩的内部开设有收屑口,转环的内部开设有出屑口。
11、其中,传动组件包括活动连接在转环外壁的固定架二,且固定架二的底部开设有出屑孔,固定架二靠近工件的一侧固定在固定架一的表面。
12、其中,齿轮一的外壁啮合有齿条皮带,且齿条皮带内壁的一端啮合有齿轮二,齿轮二的端面与电机二的输出轴固定连接,电机二远离齿轮二一侧的端面固定在支撑架一表面,齿轮二远离电机二的一端与支撑架一表面活动连接,支撑架一的表面通过连接架二与护板二固定。
13、其中,磁吸组件包括插设在扇叶内部的转杆,且转杆的底部固定有磁性棒,转杆靠近基座轴的一侧固定有转块,且转块的外壁固定有齿轮三,齿轮三的底部啮合有齿条板,齿条板固定在移动杆的表面,移动杆外壁的两侧套设有支撑架二,且支撑架二的侧边通过支杆一固定在护板二的表面。
14、其中,驱动组件包括固定在移动杆端面的连接块,连接块远离移动杆的一端通过连杆固定有螺套,且螺套的内部螺纹连接有螺杆二,螺杆二的端面与电机三的输出轴固定连接,电机三的端面固定在支撑架三的表面,支撑架三的表面通过支杆二固定在护板二的表面。
15、本发明至少具备以下有益效果:
16、控制器控制防护组件一运转,使得防护组件一对工件两侧进行遮挡保护,腕关节轴一转动,通过控制器同步控制防护组件二跟随打磨器移动,使得防护组件二贴近打磨器移动,利于对打磨碎屑进行阻挡,控制器同步控制传动组件工作,通过传动组件带动吸屑组件运转,通过吸屑组件带动空气流动吸附打磨产生的碎屑,并通过腔室对碎屑进行收集,同时,通过磁吸组件的磁性吸取,增大吸屑组件的吸附力度,便于碎屑的收集。
技术特征:
1.一种六轴打磨机器人,包括:基座轴(11),所述基座轴(11)的顶部依次连接有肩关节轴(12)、肘关节轴(13)、腕关节轴一(14)、腕关节轴二(15)以及打磨器(16),所述打磨器(16)的底部设置有夹持座(17),且夹持座(17)的表面放置有工件(18);
2.根据权利要求1所述的六轴打磨机器人,其特征在于:所述防护组件一(2)包括设置在工件(18)两侧的护板一(21),且护板一(21)底部靠近工件(18)的一侧固定有挡板(22),所述挡板(22)靠近工件(18)的一端插设在夹持座(17)的内部,所述护板一(21)的底部螺纹连接有螺杆一(23),所述螺杆一(23)的一端与夹持座(17)内壁活动连接,所述螺杆一(23)的另一端与电机一(24)的输出轴固定连接,所述电机一(24)的端面固定在夹持座(17)的内壁。
3.根据权利要求1所述的六轴打磨机器人,其特征在于:所述防护组件二(3)包括贴合在夹持座(17)表面的护板二(31),且护板二(31)靠近基座轴(11)的一侧固定有连接架一(32),所述连接架一(32)的表面与气缸(33)的伸缩杆固定连接,所述气缸(33)的底部固定在夹持座(17)的表面。
4.根据权利要求1所述的六轴打磨机器人,其特征在于:所述吸屑组件(4)包括固定在护板二(31)内部的固定架一(41),且固定架一(41)的内部设置有扇叶(42),所述扇叶(42)远离工件(18)的一侧固定有收屑罩(43),且收屑罩(43)的端面通过转环(44)连接有集屑罩(46),所述集屑罩(46)远离工件(18)一端的外壁固定有齿轮一(47)。
5.根据权利要求4所述的六轴打磨机器人,其特征在于:所述收屑罩(43)的内部开设有收屑口(45),所述转环(44)的内部开设有出屑口(48)。
6.根据权利要求1所述的六轴打磨机器人,其特征在于:所述传动组件(5)包括活动连接在转环(44)外壁的固定架二(51),且固定架二(51)的底部开设有出屑孔(49),所述固定架二(51)靠近工件(18)的一侧固定在固定架一(41)的表面。
7.根据权利要求4所述的六轴打磨机器人,其特征在于:所述齿轮一(47)的外壁啮合有齿条皮带(52),且齿条皮带(52)内壁的一端啮合有齿轮二(53),所述齿轮二(53)的端面与电机二(54)的输出轴固定连接,所述电机二(54)远离齿轮二(53)一侧的端面固定在支撑架一(55)表面,所述齿轮二(53)远离电机二(54)的一端与支撑架一(55)表面活动连接,所述支撑架一(55)的表面通过连接架二(56)与护板二(31)固定。
8.根据权利要求1所述的六轴打磨机器人,其特征在于:所述磁吸组件(6)包括插设在扇叶(42)内部的转杆(61),且转杆(61)的底部固定有磁性棒(62),所述转杆(61)靠近基座轴(11)的一侧固定有转块(63),且转块(63)的外壁固定有齿轮三(64),所述齿轮三(64)的底部啮合有齿条板(65),所述齿条板(65)固定在移动杆(66)的表面,所述移动杆(66)外壁的两侧套设有支撑架二(67),且支撑架二(67)的侧边通过支杆一固定在护板二(31)的表面。
9.根据权利要求1所述的六轴打磨机器人,其特征在于:所述驱动组件(7)包括固定在移动杆(66)端面的连接块(71),所述连接块(71)远离移动杆(66)的一端通过连杆(72)固定有螺套(73),且螺套(73)的内部螺纹连接有螺杆二(74),所述螺杆二(74)的端面与电机三(75)的输出轴固定连接,所述电机三(75)的端面固定在支撑架三(76)的表面,所述支撑架三(76)的表面通过支杆二固定在护板二(31)的表面。
技术总结
本发明涉及打磨机技术领域,具体公开了一种六轴打磨机器人,包括:基座轴,基座轴的顶部依次连接有肩关节轴、肘关节轴、腕关节轴一、腕关节轴二以及打磨器,打磨器的底部设置有夹持座,且夹持座的表面放置有工件;还包括:防护组件一,防护组件一设置在工件的两侧,打磨器工作时,控制器同步控制防护组件一工作,通过防护组件一对打磨空间两侧的碎屑进行遮挡;防护组件二,防护组件二设置在夹持座的顶部,腕关节轴一转动时,控制器同步控制防护组件二工作,使得防护组件二贴近打磨器,防护组件一和防护组件二对工件打磨产生的碎屑进行遮挡保护,同时,通过吸屑组件和磁吸组件的磁性吸取,增大吸附力度,便于碎屑的收集。
技术研发人员:杨龙,邹品德
受保护的技术使用者:深圳市智力机器科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!