一种多步拉制的垂直拉制仪的制作方法
本发明涉及生物样本实验器材生产设备,特别涉及一种多步拉制的垂直拉制仪。
背景技术:
1、在膜片钳系统中,通常使用玻璃微电极与细胞膜封接对细胞内电信号进行测量,玻璃微电极自身的形状、尺寸等参数会直接影响电信号的测量。目前,常使用拉制仪对玻璃管进行拉制,通过温度、拉力等参数控制玻璃微电极的形状尺寸。由于拉伸步骤对玻璃微电极的质量影响极大,常常会对玻璃管进行多步拉制。
2、现有的拉制仪通常分为水平拉制仪和垂直拉制仪,水平拉制仪常使用金属丝或者铂金片对玻璃管进行加热,在玻璃管被加热至熔点后,在重力或者电磁力的作用下将玻璃管向相反方向同时拉伸,在拉长至适当位置时停止加热,并对玻璃管吹起冷却使其凝固。重复上述过程即可实现多步拉制,获得所需尺寸的玻璃微电极。水平拉制仪通过气泵或者外接气源控制吹气压力和吹气时间对玻璃管进行冷却,为了避免压缩空气中水分的影响,冷却前还需要对压缩空气进行干燥,因此水平拉制仪的结构通常较复杂、拉制过程中影响因素较多,导致生产的玻璃微电极质量不稳定。常见的垂直拉制仪通常使用电磁铁与活动挡块配合对拉制机构进行限位,在对玻璃管加热拉伸前,该挡块在电磁铁控制下移动到拉制机构下方,可以在拉伸进行到一定距离时挡住拉制机构,此时停止加热,加热机构可向下移动,使其相对于玻璃管大致上下居中,待玻璃管自然冷却后,该挡块在电磁铁控制下移开,实现两步拉制,这种垂直拉制仪的挡块只有挡住和移开两种状态,无法调整挡住时的拉制距离,最多只能完成两步拉制,无法满足玻璃微电极多种拉制需求。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种多步拉制的垂直拉制仪。
2、本发明的目的是通过以下技术方案来实现的:
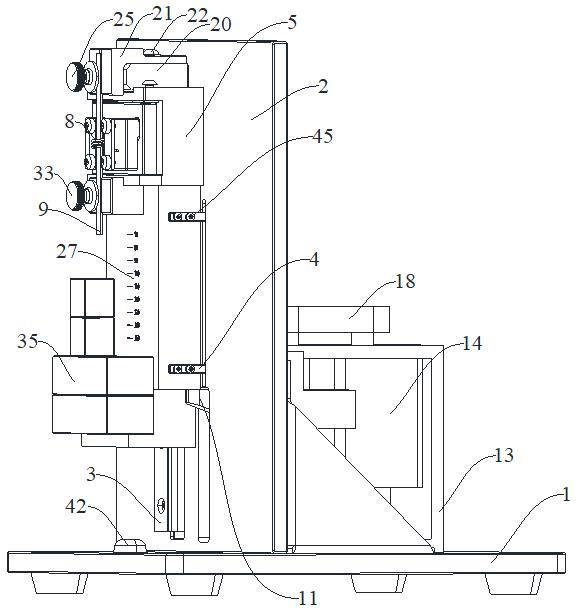
3、一种多步拉制的垂直拉制仪,包括:支撑组件,包括底板和垂直设置在所述底板上的背板,沿垂直于所述底板方向,所述背板上设置有导轨;夹具组件,包括设置在所述背板上的上夹具部件和下夹具部件,所述下夹具部件滑动设置在所述导轨上且位于所述上夹具部件的正下方,所述下夹具部件上设置有光耦遮挡片部件;加热组件,包括滑动设置在所述导轨上的加热底座、设置在所述加热底座背部且穿过所述背板的接线端子、穿过所述加热底座与所述接线端子连接的加热块和与所述加热块相连的螺旋加热丝,所述加热底座设置在所述上夹具部件与所述下夹具部件之间,玻璃管穿过所述螺旋加热丝固定在所述上夹具部件和所述下夹具部件之间;移动组件,包括设置在所述背板上的第一电机,所述第一电机的动子端与所述加热底座相连并驱动所述加热底座沿垂直于所述底板方向滑动;挡块移动组件,包括部分穿过所述背板且滑动设置在所述下夹具部件下方的活动挡块、与所述活动挡块连接的升降部件和光耦传感器部件,所述光耦传感器部件与所述光耦遮挡片部件感应接触;控制组件,包括微控制单元,所述微控制单元分别与所述第一电机、所述光耦传感器部件和所述升降部件连接。
4、进一步地,所述升降部件包括:固定座,固设在所述底板上;第二电机,设置在所述固定座内且与所述微控制单元连接,所述第二电机的转子端穿过所述固定座顶部设置有第一传动轮;丝杆,穿过所述活动挡块转动设置在所述固定座内,所述丝杆顶部穿过所述固定座顶部设置有第二传动轮,所述第一传动轮和所述第二传动轮上套设有传动链,所述第一传动轮通过所述传动链实现动力传递;导柱,设置在所述固定座内,所述导柱穿过所述活动挡块,所述活动挡块在所述丝杆的转动下沿所述导柱滑移。
5、进一步地,所述上夹具部件包括:第一安装座,设置在所述背板上;第一夹板,所述第一夹板通过第一螺钉设置在所述第一安装座上,所述第一夹板上设置有用于放置所述玻璃管的第一凹槽;第一压板,与第一手拧螺钉配合,将所述玻璃管固定在所述第一凹槽内,所述第一压板与所述第一夹板之间设置有第一弹簧。
6、进一步地,所述下夹具部件包括:下夹具底座,滑动设置在所述导轨上,所述光耦遮挡片部件设置在所述下夹具底座上;第二安装座,设置在所述下夹具底座上,所述第二安装座上设置有与所述第一凹槽相对应的第二凹槽;第二压板,与第二手拧螺钉配合,将所述玻璃管底部固定在所述第二凹槽内,所述第二压板与所述第二安装座之间设置有第二弹簧;砝码,设置为多个,所述砝码可拆卸地设置在所述下夹具底座上。
7、进一步地,所述光耦遮挡片部件包括设置在所述下夹具底座的第一光耦遮挡片和第二光耦遮挡片,所述光耦传感器部件包括设置在所述活动挡块的第一光耦传感器和设置在所述背板上的第二光耦传感器,所述第一光耦传感器与所述第一光耦遮挡片感应接触且与所述微控制单元通信连接,所述第二光耦传感器与所述第二光耦遮挡片感应接触且与所述微控制单元通信连接。
8、进一步地,所述加热组件还包括隔热板,所述隔热板套设在所述加热块外部且与所述加热块连接,所述隔热板通过第二螺钉设置在所述加热底座内,所述隔热板与所述加热底座之间设置有垫片。
9、进一步地,所述移动组件包括:电机安装座,固设在所述背板上且位于所述接线端子下方;传动块,滑动设置在所述背板上,所述传动块一端与所述第一电机的动子端连接,所述传动块的另一端与所述加热底座连接,所述第一电机的动子端带动所述传动块在所述背板内滑动。
10、进一步地,所述底板底部设置有脚垫,所述底板顶部设置有缓冲垫,所述缓冲垫设置在所述下夹具底座正下方。
11、进一步地,还包括用于监测所述螺旋加热丝位移变化的第一位移传感器和用于监测所述活动挡块位移变化的第二位移传感器,所述第一位移传感器和所述第二位移传感器分别与所述微控制单元连接。
12、进一步地,所述第一电机和所述第二电机上均安装有编码器。
13、本发明的有益效果是:
14、1)加热组件对玻璃管进行加热,并在下夹具部件拉力作用下被拉长,挡块移动组件通过限制下夹具部件的位置限定玻璃管的拉制长度,下夹具部件设置有光耦遮挡片,挡块移动组件上设置光耦传感器,每步拉制完成后,光耦遮挡片和光耦传感器感应中心重叠,微控制单元接收来自光耦传感器传递的信号后,向挡块移动组件和加热组件发送信号,加热组件和挡块移动组件向下移动,开启下一步拉制,实现玻璃管的多步拉制,满足对玻璃管微电极制作过程中不同的拉制需求。
15、2)挡块移动组件设置有与第二电机连接的第一传动轮和与丝杆连接的第二传动轮,第一传动轮和第二传动轮套设在传动链内,通过第二电机驱动丝杆旋转,活动挡块套设在丝杆外,导柱平行于丝杆穿过活动挡块,使活动挡块垂直于底板运动,保证活动挡块运动轨迹的精准性。
16、3)通过设置位移传感器,实时检测并向微控制单元反馈位置,从而控制第一电机和第二电机工作,实现闭环控制,与吹气冷却方案相比流程精简,减少玻璃管拉制过程中的不稳定因素,保证了拉制精度。
技术特征:
1.一种多步拉制的垂直拉制仪,其特征在于,包括:
2.根据权利要求1所述的一种多步拉制的垂直拉制仪,其特征在于,所述升降部件包括:
3.根据权利要求2所述的一种多步拉制的垂直拉制仪,其特征在于,所述上夹具部件包括:
4.根据权利要求3所述的一种多步拉制的垂直拉制仪,其特征在于,所述下夹具部件包括:
5.根据权利要求4所述的一种多步拉制的垂直拉制仪,其特征在于,所述光耦遮挡片部件包括设置在所述下夹具底座(27)的第一光耦遮挡片(4)和第二光耦遮挡片(45),所述光耦传感器部件包括设置在所述活动挡块(11)的第一光耦传感器(12)和设置在所述背板(2)上的第二光耦传感器(46),所述第一光耦传感器(12)与所述第一光耦遮挡片(4)感应接触且与所述微控制单元通信连接,所述第二光耦传感器(46)与所述第二光耦遮挡片(45)感应接触且与所述微控制单元通信连接。
6.根据权利要求2-5任一项所述的一种多步拉制的垂直拉制仪,其特征在于,所述加热组件还包括隔热板(36),所述隔热板(36)套设在所述加热块(7)外部且与所述加热块(7)连接,所述隔热板(36)通过第二螺钉(37)设置在所述加热底座(5)内,所述隔热板(36)与所述加热底座(5)之间设置有垫片(38)。
7.根据权利要求2-5任一项所述的一种多步拉制的垂直拉制仪,其特征在于,所述移动组件包括:
8.根据权利要求7所述的一种多步拉制的垂直拉制仪,其特征在于,所述底板(1)底部设置有脚垫(41),所述底板(1)顶部设置有缓冲垫(42),所述缓冲垫(42)设置在所述下夹具底座(27)正下方。
9.根据权利要求8所述的一种多步拉制的垂直拉制仪,其特征在于,还包括用于监测所述螺旋加热丝(8)位移变化的第一位移传感器(43)和用于监测所述活动挡块(11)位移变化的第二位移传感器(44),所述第一位移传感器(43)和所述第二位移传感器(44)分别与所述微控制单元连接。
10.根据权利要求8所述的一种多步拉制的垂直拉制仪,其特征在于,所述第一电机(10)和所述第二电机(14)上均安装有编码器。
技术总结
本发明公开了一种多步拉制的垂直拉制仪。包括支撑组件;用于固定玻璃管的夹具组件,夹具组件上设置光耦遮挡片;用于加热玻璃管的加热组件;用于驱动加热组件的移动组件和用于限制夹具组件的挡块移动组件。加热组件对玻璃管进行加热,并使玻璃管在下夹具部件拉力作用下被拉长,挡块移动组件通过限制下夹具部件的位置限定玻璃管的拉制长度,下夹具部件设置有光耦遮挡片,挡块移动组件上设置光耦传感器,每步拉制完成后,光耦遮挡片和光耦传感器感应中心重叠,通过微控制单元向挡块移动组件和加热组件发送信号,加热组件和挡块移动组件向下移动,开启下一步拉制,实现玻璃管的多步拉制,满足对玻璃管微电极制作过程中不同的拉制需求。
技术研发人员:杨洋,杨波,李鹏,黄武
受保护的技术使用者:成都泰盟软件有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!