一种行星齿轮机构变速电动机/飞轮混合动力传动装置
1.本发明公开一种行星齿轮机构变速电动机/飞轮混合动力传动装置,涉及一种以行星机构变速并将电动机与飞轮储能进行动力混合驱动的传动装置,属于汽车动力装置的技术领域。
技术背景
2.研究表明,城市工况下车辆因制动消耗的能量占总驱动能量的50%。这不仅浪费能源,也产生环境问题。制动能量回收是指将车辆制动时消耗的能量转换成可用能量,并将其存储在介质中,待使用时可迅速将能量释放。在几种典型的储能方式中,电化学储能由于高能量密度、低价格及成熟的技术被广泛使用,但频繁充放电使其寿命缩短,且对电化学储能器性能要求较高;飞轮储能的高效率、高瞬时功率、快速响应及长循环寿命等优点,使其成为最具发展前途的短时储能技术之一。综合上述两种储能方式的优点,本发明通过双转子电机实现了汽车动能与飞轮动能的转换,降低了电池的充放电频率及深度,提高了电池的使用寿命。
技术实现要素:
3.本发明的目的在于实现一种行星齿轮机构变速电动机/飞轮混合动力传动装置,可实现汽车纯电机驱动、动力耦合、制动能量回收及停车充电,降低了电池的充放电频率及深度,提高了电池的使用寿命。
4.为了实现上述发明目的,本发明采用了如下技术方案:
5.本发明所述的飞轮储能混合动力系统它包括电机、离合器、变速器、两个定比齿轮副、双转子电机、控制电路、电池、储能飞轮、电子控制单元、电机控制器、主减速器、差速器、半轴及驱动车轮;双转子电机包括三个端口,两个机械端口(内转子轴、外转子轴),一个电气端口(滑环),若机械端口(内转子轴)固定,双转子电机的工作原理与永磁同步电机类似。
6.本发明采用技术方案的工作原理是:
7.1..纯电机驱动模式
8.纯电机驱动是指汽车的驱动力只来源于电动机输出动力。按照驾驶员意图,分别控制传动系统中行星机构的相应离合器和制动器实现两个挡位。
9.根据行星机构中传动部件的运动关系公式,即
10.n
s
+an
r-(1+α)n
c
=0
ꢀꢀ
(1)
11.式中:n
s-太阳轮转速;
12.n
r-齿圈转速;
13.n
c-行星架转速;
14.α-齿圈与太阳轮齿数比。
15.不同挡位的动力传动过程如下:
16.(1)低速挡。电动机输出轴与太阳轮相连,行星架作为输出,对行星机构中的齿圈
进行制动,即n
s
≠0,n
r
=0;所以,由公式(1)可知,低挡位的传动比为:
[0017][0018]
行星机构的行星架转速为:
[0019][0020]
低挡位的动力传递路线为:电动机通过离合器驱动行星机构的太阳轮使行星齿轮旋转并带动行星架转动输出动力;行星架驱动主减速器输入齿轮,带动差速器并通过半轴驱动车轮转动。
[0021]
由公式(3)可知,在低速挡时,行星机构变速输出动力的行星架转速n
c
比输入动力的太阳轮转速n
s
低,减速传动比为(1+α)大于1;因此,与高挡位相比,在相同的电动机转速条件下车辆运行的速度低。
[0022]
(2)高速挡。电动机输出轴与太阳轮相连,行星架作为输出,行星机构中的齿圈与行星架通过离合器结合,即n
c
=n
r
;所以,由公式(1)可知,高挡位的传动比为:
[0023][0024]
行星机构的行星架转速为:
[0025]
n
c
=n
s
ꢀꢀ
(5)
[0026]
高挡位的动力传递路线为:电动机通过离合器驱动行星机构的太阳轮使行星齿轮旋转并带动行星架转动输出动力;行星架驱动主减速器输入齿轮,带动差速器并通过半轴驱动车轮转动。
[0027]
由公式(5)可知,在高速挡时,行星机构齿圈与行星架相连,减速传动比为1,因此,在相同的电动机转速条件下车辆运行的速度高。
[0028]
(3)倒车挡。只要改变电动机转动方向,既可以在低速或高速挡位下实现车辆的倒车行驶。
[0029]
2..动力耦合模式
[0030]
行星机构具有三个转动自由度,当其中的两个转动自由度确定后,其余一个自由度的转动状态也就确定。因此,可利用行星机构的这个特性进行电机和飞轮能量耦合输出动力。
[0031]
根据行星机构能量输入输出的功率平衡方程:
[0032]
p
s
+p
r
+p
c
=0
ꢀꢀ
(6)
[0033]
式中:p
s-太阳轮的输入功率;
[0034]
p
r-齿圈的输入功率;
[0035]
p
c-行星架的输出功率。
[0036]
即将太阳轮和齿圈作为动力混合的两个输入端,行星架作为动力混合后的输出端,则有
[0037]
m
s
n
s
+m
r
n
r
=-m
c
n
c
ꢀꢀ
(7)
[0038]
式中:m
s-太阳轮的输入转矩;
[0039]
m
r-齿圈的输入转矩;
[0040]
m
c-行星架的输出转矩。
[0041]
根据公式(1)和公式(7),由行星架输出的转速和扭矩分别为:
[0042][0043][0044]
其中,式(9)中的负号表示输入扭矩与输出扭矩的作用方向相反;太阳轮(n
s
)的动力来至于电动机,齿圈(n
r
)的动力来至于储能飞轮。
[0045]
当电机直接驱动与太阳轮联接的离合器,电机的动力传递到太阳轮,使行星机构中一个自由度的太阳轮获得动力输入;与此同时,在变速器中与齿圈联接的离合器分离、齿圈制动器松开及飞轮离合器结合的条件下,储能飞轮通过双转子电机、两级齿轮副将动力直接传到齿圈上,使行星机构另一个自由度的齿圈获得动力输入。因此,行星机构将太阳轮的动力输入和齿圈的动力输入耦合后由行星架输出动力。
[0046]
3.能量回收模式
[0047]
利用飞轮将机械能进行快速存储的蓄能特性,使飞轮储能装置作为车辆的动力源之一。在主动力装置功率较小的情况下,这种车辆辅助动力通过与主动力混合输出的控制方式,可以使车辆的起步加速动力性能得到有效的提升。
[0048]
汽车减速时,变速器中离合器结合、齿圈制动器断开,机械能经差速器、主减速器、行星架、齿圈、双转子电机及两级齿轮副后储存在飞轮中。两级齿轮副均具有增速效果,以提高飞轮储能量;飞轮能量输出时可以实现减速增扭,满足汽车行驶要求。
[0049]
4..停车充电模式
[0050]
若停车后飞轮还在转动,即飞轮还有剩余能量时,使双转子电机处于发电机工作状态,由飞轮存储的能量驱动双转子电机运转,将能量储存在动力电池中。
[0051]
在动力耦合及能量回收模式中,通过双转子电机实现了汽车动能与飞轮动能的转换,且电池转换的能量远小于动能转换过程中的总能量,为定量说明该特性,定义内、外转子轴转速为n
ir
、n
or
,转差转速、转差功率为δn、δp,电机的额定转速、额定功率、额定扭矩为n
n
、 p
n
、t
n
。双转子电机中转速、转矩及功率满足以下关系:
[0052]
δn=n
ir-n
or
ꢀꢀ
(10)
[0053][0054]
假设n
ir
=in
n
,n
or
=(i+1)n
n
,此时内转子轴输出功率为:
[0055][0056]
外转子轴输出功率为:
[0057][0058]
转差功率为:
[0059]
δp=|p
ir-p
or
|=p
n
ꢀꢀ
(14)
[0060]
转差转速为:
[0061]
δ
n
=|n
ir-n
or
|=in
n
ꢀꢀ
(15)
[0062]
由(14)(15)可知,在双转子电机的额定转速、额定功率、额定转矩一定的前提下,
其机械端口可传递的功率远大于其额定功率,且不受额定功率的影响,双转子电机与电池间只需完成转差功率的转换。
[0063]
本发明的优点:该系统中储能飞轮以机械能形式回收部分制动动能,实现能量回收;飞轮增扭后与发动机动力耦合,提高汽车瞬时加速度;停车时旋转的飞轮可以为电池充电。在上述能量转换过程中,通过双转子电机实现了汽车动能与飞轮动能的转换,降低了电池的充放电频率及深度,提高了电池的使用寿命。
附图说明
[0064]
图1为本发明的基本结构示意图;
[0065]
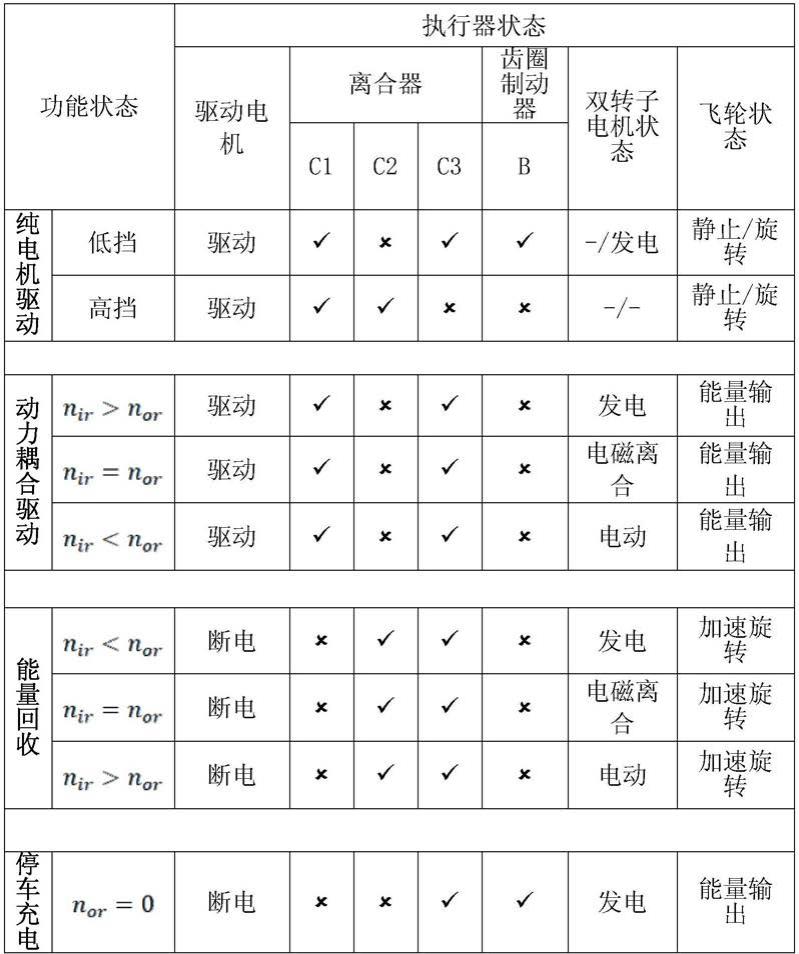
表1为本发明传动关系分析;
[0066]
图2为本发明所述的飞轮储能混合动力系统处于工作模式一时的示意图;
[0067]
图3为本发明所述的飞轮储能混合动力系统处于工作模式二时的示意图;
[0068]
图4为本发明所述的飞轮储能混合动力系统处于工作模式三时的示意图。
[0069]
图5为本发明所述的飞轮储能混合动力系统处于工作模式四时的示意图。
具体实施方式
[0070]
下面结合附图和实施例对本发明作进一步详细的说明,但本发明的具体实施方式不限于此。
[0071]
实施实例:下面结合图2至图5及表1说明本实施方式,本发明所述的飞轮储能混合动力系统它包括驱动电机(1)、离合器、变速器、两个定比齿轮副、双转子电机(16)、控制电路(17)、电池(20)、储能飞轮(21)、电子控制单元(23)、电机控制器(22)、主减速器(10)、差速器(11)、半轴(12)及驱动车轮(13);
[0072]
所述的双转子电机(16)包括三个端口,两个机械端口(16-1、16-2),一个电气端口(16-3),其中16-1为外转子轴,16-2为内转子轴,16-3为滑环。若机械端口16-2固定,所述双转子电机的工作原理与永磁同步电机类似;
[0073]
所述的变速器为两挡变速器,包括太阳轮(4)、行星齿轮(5)、齿圈(6)、齿圈制动器 (7),行星架(8)、离合器c2(9),齿圈与行星齿轮内啮合,且与齿轮(14)外啮合,太阳轮作为输入轴与离合器c1(2)相连,行星架作为输出与主减速器(10)相连;
[0074]
驱动电机(1)输出轴通过离合器(2)与变速器输入轴相连,变速器通过行星齿轮架(5) 将动力传递给主减速器(10)、差速器(11)、半轴(12)及驱动车轮(13);
[0075]
变速器齿圈(6)通过齿轮(14)与离合器(6)主动部分相连,从动部分与双转子电机 (16)的外转子轴(16-1)相连,双转子电机的内转子轴(16-2)通过齿轮副(18/19)与储能飞轮(21)相连;
[0076]
电子控制单元ecu(23)与电机控制器(22)、电池(20)及双转子电机控制电路(17) 电气连接,并可根据汽车各传感器的输入信号控制执行器工作;
[0077]
所述的离合器(2、9、15)可以为电磁式离合器或摩擦式离合器;
[0078]
所述的齿轮副(6/14、18/19)为圆柱斜齿轮;
[0079]
所述主动力传递系统及所述飞轮储能系统并联,在整车控下可实现汽车纯电机驱动、动力耦合、制动能量回收及停车充电模式下面对飞轮储能混合动力系统的工作模式进
行说明。该系统中不同工作模式是通过离合器c1、c2、c3及制动器b的切换来实现的。为了使各个工作模式的表现形式更加清晰,在每个工作模式示意图中主要画出了机械部件的连接及能量传递路线。在各个工作模式示意图中,离合器结合用红色阴影表示,分离则去除阴影;齿圈制动带起作用用黑色阴影表示。
[0080]
1.纯电机驱动模式传动路线
[0081]
(1)低速挡位:如图2(a)所示,离合器c1(2)、c3(15)结合,离合器c2(9)分离,齿圈制动带b(7)起作用。电机1经离合器2驱动与其联接为一体的太阳轮轴、安装在太阳轮轴上的太阳轮4一同转动;齿圈制动,太阳轮4与行星轮5啮合传动,驱动行星架8 转动,与行星架8联接为一体的主减速器主动齿轮10带动差速器11,半轴12驱动车轮13 转动,此时变速器的变速比为(1+α)。
[0082]
若飞轮处于旋转状态,飞轮21带动齿轮副19/18转动,驱动齿轮轴18联接在一起的双转子电机16内转子轴16-2,外转子轴16-1被齿圈制动带制动,此时双转子电机16处于发电模式,飞轮21的机械能经电机16转化为电能以化学能形式储存在动力电池20中。
[0083]
(2)高速挡位:如图2(b)所示,离合器c1(2)、c2(9)结合,离合器c3(15)分离,齿圈制动带b(7)不起作用。电机1经离合器2驱动与其联接为一体的太阳轮轴、安装在太阳轮轴上的太阳轮4一同转动;离合器c2使齿圈与行星架联接,太阳轮4与行星轮5啮合传动,驱动行星架8转动,与行星架8联接为一体的主减速器主动齿轮10带动差速器11,半轴12驱动车轮13转动,此时变速器的变速比为1。
[0084]
(3)倒挡:电动机反转,既可以在低速或高速挡位下实现车辆的倒车行驶,此处不再赘述。
[0085]
2.动力耦合模式传动路线
[0086]
如图3所示,离合器c1(2)、c3(15)结合,离合器c2(9)断开,齿圈制动带b(7) 不起作用。电机1经离合器2驱动与其联接为一体的太阳轮轴、安装在太阳轮轴上的太阳轮 4一同转动,作为行星机构的一个自由度(太阳轮)的动力输入;储能飞轮与齿轮19联接,经齿轮副(19/18)减速后将动力传递到双转子电机16的内转子轴16-2,此时若n
ir
>n
or
(图 3a所示),一部分机械能通过双转子电机滑环16-3、控制电路17转化为电能储存在动力电池20中,另一部分机械能通过双转子电机的外转子轴16-1传递到离合器c3(16)的主动部分,带动离合器c3从动部分旋转,并驱动与c3从动部分联接的齿轮14转动,使行星机构另一个自由度的齿圈获得动力输入。行星机构将太阳轮的动力和齿圈的动力耦合后带动行星架8转动,与行星架8联接为一体的主减速器主动齿轮10带动差速器11,半轴12驱动车轮13转动。
[0087]
若n
ir
=n
or
(图3b所示),则储能飞轮的机械能均由外转子轴16-1传递到离合器c3(15) 的主动部分,双转子电机处于电磁离合模式;若n
ir
<n
or
(图3c所示),则电池将化学能转化为电能,双转子电机处于电动模式,电池20驱动外转子轴16-1转动。在上述能量转换过程中,通过双转子电机实现了飞轮动能与汽车动能的转换,且电池转换的能量远小于该过程中转换的总能量。
[0088]
3.制动能量回收模式传动路线
[0089]
如图4所示,离合器c1(2)断开,离合器c2(9)、c3(15)结合,齿圈制动带b(7) 不起作用。汽车减速时,旋转的驱动车轮13带动半轴12、差速器11转动,将动力传递到主减速器主动齿轮10,与主减速器主动齿轮10联接为一体的行星架8同速转动,行星架8带动齿圈6及
与齿圈6外啮合的齿轮14转动,驱动与齿轮轴14联接为一体的双转子电机16外转子轴16-1,此时若n
ir
<n
or
(图4a所示),一部分机械能通过双转子电机滑环16-3、控制电路17转化为电能储存在动力电池20中,另一部分机械能通过双转子电机的内转子轴16-2 传递到齿轮副19/18,增速后将能量储存在飞轮21中。
[0090]
若n
ir
=n
or
(图4b所示),则储能飞轮的机械能均由内转子轴16-2传递到齿轮副19/18;若n
ir
>n
or
(图4c所示),则电池将化学能转化为电能,双转子电机处于电动模式,电池20 驱动内转子轴16-2转动。在上述能量转换过程中,通过双转子电机实现了汽车动能与飞轮动能的转换,且电池转换的能量远小于动能转换过程中的总能量。
[0091]
4.停车充电模式传递路线
[0092]
如图5所示,离合器c1(2)、c2(9)断开,离合器c3(15)结合,齿圈制动带b(7) 起作用。若停车后飞轮21还在转动,即飞轮21还有剩余能量时,飞轮21带动齿轮副19/18 转动,驱动齿轮轴18联接在一起的双转子电机16内转子轴16-2,外转子轴16-1被齿圈制动带制动,此时双转子电机16处于发电模式,飞轮21的机械能经电机16转化为电能以化学能形式储存在动力电池20中。表1传动关系分析
结合或起作用—√ 断开—
×ꢀ
无能量输出—
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1