用于在盲点中观察的系统和过程的制作方法
用于在盲点中观察的系统和过程
1.相关申请的交叉引用
2.本申请是2018年7月19日提交的16/040359的部分继续申请,并且也是2018年8月12日提交的16/101474的部分继续申请。这些申请是2015年12月12日提交的14/898129(以下简称('129申请)的部分继续申请。'129申请是2015年12月11日提交的国际申请序列号pct/us15/65255的国家阶段申请。'129申请和国际申请pct/us15/65255要求包括2014年12月12日提交的序列号62/091346和2015年6月17日提交的序列号62/181170的两个临时申请的优先权,其中所有上述申请的公开内容通过引用整体并入本文。
技术领域
3.一个实施例涉及一种用于观察盲点的显示和视频系统,其配置为扩大汽车、机动车辆、飞机或轮船的操作者的观察区域。
背景技术:
4.有时,观察者会遇到盲点且看不见周围障碍物,从而限制了车辆操作所需的可见性。因此,需要为使用者提供附加观察区域,以使人们可以在盲点中观看。
技术实现要素:
5.在一实施例中,公开了一种观察系统,其联接至诸如具有框架的机动车辆、飞机或轮船的装置,该框架具有车顶、至少一个支撑件和车身,至少一个支撑件将车顶支撑在车身上方。该系统可以包括第一组相机、联接到支撑件的至少一个屏幕。另外,第一组相机还联接到至少一个支撑件,并且其中所述至少一个屏幕与第一组相机通信,其中所述至少一个屏幕显示由第一组相机呈现的图像。
附图说明
6.根据结合附图考虑的以下详细描述,本发明的其他目的和特征将变得显而易见。然而,应当理解,附图仅被设计为说明性的,而不是对本发明的限制的定义。
7.在附图中,多个视图中的相似附图标记表示相似的元件:
8.图1a是一实施例的侧视图;
9.图1b是图1a所示实施例的顶视图;
10.图1c示出了图1a所示实施例的相反侧视图;
11.图2a是另一实施例的侧剖视图;
12.图2b是图2a所示实施例的侧视图;
13.图2c是图2a所示实施例的前视图;
14.图3a是图1a或图2a的实施例的汽车的前视图;
15.图3b是另一实施例的内部前视图;
16.图4a是图1a或图2a的实施例的汽车的内部视图;
17.图4b是汽车内部的另一视图;
18.图5是联接到后视镜的实施例的视图;
19.图6是联接到后视镜的实施例的另一视图;
20.图7是图5的实施例的侧视图;
21.图8是带有相机的侧视镜的视图;
22.图9是带有相机的侧视镜的侧视图;
23.图10a是带有相机的侧视镜的前透视图;
24.图10b是镜子的侧剖视图;
25.图11是带有臂的屏幕的侧视图;
26.图12是图11的屏幕的前透视图;
27.图13是图11的屏幕的侧视图;
28.图14是图11的屏幕的后视图;
29.图15是图11的装置的一部分的侧视图;
30.图16a是图15的可调节连接的侧视图;
31.图16b是图15的可调节连接的一部分的侧面透视图;
32.图16c是图15的可调节连接的一部分的侧视图;
33.图16d是图16a的可调节连接器的侧视图;
34.图16e示出了图16a的可调节连接器的端视图;
35.图16f示出了图16a所示的实施例的侧面透视图;
36.图17以透视图示出了可调节连接器的侧视图;
37.图18a是屏幕的后视图;
38.图18b是屏幕的袖带式连接的前视图;
39.图19是与机动车辆及下文所述的屏幕一起使用的相机的侧面分解视图;
40.图20是安装有屏幕的汽车内部的视图;
41.图21是内部安装有屏幕的汽车的侧视图;
42.图22是内部安装有屏幕的汽车内部的另一视图;
43.图23a是另一实施例的侧内部图;
44.图23b是另一实施例的侧内部图;
45.图23c是另一实施例的侧内部图;
46.图23d是另一实施例的侧内部图;
47.图24a是飞机或轮船的座舱的视图;
48.图24b是飞机或轮船的座舱的侧视图;
49.图25是公开了屏幕和相机组合的新实施例的视图;
50.图26示出了屏幕和相机组合的侧面分解视图;
51.图27示出了屏幕和相机组合的后透视图;
52.图28以分解图示出了屏幕和相机组合的后透视图;
53.图29示出了屏幕的后视图;
54.图30示出了屏幕和相机组合的侧面剖视图;
55.图31示出了具有内部布线的屏幕和相机组合的侧面剖视图;
56.图32示出了具有用于单个屏幕的多个相机的屏幕和相机组合的侧视图;
57.图33是在汽车的侧视镜上安装有多个相机的相机和镜子组合的前视图;
58.图34是可放置在汽车支撑件的侧面或镜子上的适配器的侧视图;
59.图35示出了侧面支撑件,允许相机具有可插入其中的可调节角度支座;
60.图36示出了屏幕和多相机安装;
61.图37是用于屏幕和相机组合的电子部件的示意性框图;
62.图38是与服务器等中央设备进行通信的电子部件的示意性框图;
63.图39a是从车辆内部观察的另一实施例的视图;
64.图39b是图39a的投影仪的视图;
65.图39c是图39a的另一投影仪的视图;
66.图40a是具有图39a的实施例的车辆的前视图;
67.图40b是图39a的投影仪的前视图;
68.图40c是投影仪的另一实施例;
69.图41a是具有其他实施例的车辆内部的视图;
70.图41b是与图41a相关的显示系统的视图;
71.图42a是具有图41a的系统的车辆的视图;
72.图42b是图41b的显示系统的视图;
73.图42c是具有另一实施例的车辆的内部的视图;
74.图43a是具有另一实施例的车辆的内部的视图;
75.图43b是图43a的显示系统的视图;
76.图44a是从图43a的实施例的车辆外部观察的视图;
77.图44b是图43b的显示系统的后视图;
78.图45是从具有另一实施例的车辆内部观察的视图;
79.图46是从图45的实施例的车辆外部观察的视图;
80.图47是从另一实施例的车辆内部观察的视图;
81.图48是从图47的实施例的车辆的外部观察的视图;
82.图49是从另一实施例的车辆内部观察的视图;
83.图50是从图49的实施例的车辆外部观察的视图;
84.图51是可以与图50的实施例一起使用的实施例的视图;
85.图52是图51所示的显示器的后视图;
86.图53a是具有另一实施例的车辆的内部的视图
87.图53b是图53a的显示部件的视图;
88.图54a是图53a和53b所示的实施例的视图;
89.图54b是图53a、53b和54a所示的部件的视图;
90.图55是可以与以上实施例中的任何一个一起使用的部件的电子网络的视图;
91.图56a是相机系统的框图;
92.图56b是透镜系统的视图;
93.图57是用于识别物体的流程图;
94.图58a是另一实施例的视图;
95.图58b是屏幕的俯视图;
96.图58c是图58a的实施例的汽车的俯视图;
97.图59是汽车的另一实施例的俯视图;
98.图60是图59的汽车的另一视图;
99.图61是用于侧视镜上的相机的清洁系统的侧视图;
100.图62是用于相机透镜或盖的清洁系统的侧面剖视图;
101.图63是用于相机的清洁系统的特写视图;
102.图64是具有清洁系统的侧视镜的内部视图;
103.图65是其中设置有加热场的盖的视图;
104.图66是具有特定的前灯和侧灯组合的汽车的俯视图;
105.图67是前灯和侧灯组合的特写视图;
106.图68是另一实施例的另一视图;
107.图69是图68的实施例的另一视图;
108.图70是图68的实施例的另一视图;
109.图71是图68的实施例的另一视图;
110.图72是另一实施例的另一视图;
111.图73是图72的实施例的另一视图;
112.图74是另一实施例;
113.图75是图74的实施例的另一视图;
114.图76是另一实施例的侧视图;
115.图77a是另一实施例的侧视图,示出了安装有头枕的监视器;
116.图77b是部件之间的电子连接的视图;
117.图78是用于汽车的相机的可视范围的视图;
118.图79a是另一实施例的侧视图,示出了安装有可调节头枕的监视器;
119.图79b是图79a的实施例的前透视图;
120.图79c是图79a所示的实施例的俯视透视图;
121.图80是另一实施例的侧视图;
122.图81是图80的实施例的透视图;
123.图82是图80的实施例的透视图,但安装在柱子上更高;
124.图83是图80的实施例的侧视图,且安装在柱子上更高;
125.图84是图80的实施例的另一侧视图,其安装在圆柱上更高;以及
126.图85是另一实施例的侧视透视图。
具体实施方式
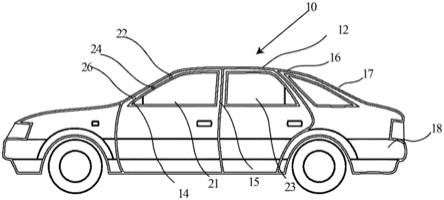
127.图1a是一实施例的侧视图。该实施例10示出了具有框架的汽车12,该框架包括车身18、车顶16以及支撑件14和15。支撑件14和15将车顶支撑在车身上方。诸如前挡风玻璃19之类的窗户位于支撑件14.1和14.2之间。支撑件14包括支撑件14.1和14.2。支撑件15包括支撑件15.1和15.2。还有后支撑件17,其也可用于将车顶16支撑在车身18上。侧窗21和23也散布在车顶16和车身18之间。
128.图1b是图1a所示实施例的顶视图。在该视图中,具有挡风玻璃19和后挡风玻璃25。还示出了车顶16的顶部。另外,示出了带有支撑件14.1和14.2的汽车的两侧,每个支撑件具有多个相机,比如至少一个相机。例如,在第一侧支撑件14.1中有三个相机22、24和26。此外,还有附加支撑件14.2,其也具有附加相机32、34和36。还有一条虚线30.1,其将汽车一分为二,其中在该视图中,汽车的前端在该线的左侧,而汽车的后端在该线的右侧。支撑件14.1和14.2位于汽车的前端。
129.图1c示出了与图1a相反的一侧,示出了相机32、34、36以及支撑件15.2。因此,在支撑件14.1和14.2的每一侧可以分别有至少一个相机,但在该实施例中有至少三个相机。因为在每一侧有多个相机,所以这些相机中的每一个都提供了附加深度感知,因为这些相机位于距汽车前部的不同高度和不同深度处。这些相机22、24、26和32、34和36位于汽车12的前挡风玻璃之间。
130.图2a示出了汽车的侧视图,其中该设计示出了另一实施例11,其示出了屏幕40,屏幕40示出了汽车内部的图像或视图。该视图还示出了联接至支撑件14的相机22、24和26。该视图是示出了车辆内部的剖开侧视图。该屏幕的位置在汽车中部于汽车前座和后座之间的支撑框架上。屏幕或显示器40使用诸如图2a所示的支撑结构联接到框架部分。
131.图2b是图2a所示实施例的侧视图。该视图示出了外部视图。该外部视图示出了附加相机52、54和56,它们联接到支撑件15.1,而如图所示,屏幕或显示器40联接到支撑件15.2。相机52、54和56与相关的屏幕通信,比如在相关支撑件(比如支撑件15.1)上示出的屏幕40。因此,屏幕恰好位于相机的内部。该视图还示出了图2b上的平分线30.2,其基本水平延伸并形成将汽车一分为二的平分线,从而在平分线的下方示出了下半部,而在平分线的上方示出了上半部。因此,相机及相关显示器示出在汽车的上半部。例如,相机22、24和26及相关显示器示出在汽车的顶部前部中,以覆盖汽车的顶部前部观察区域中的盲点。
132.图2c示出了实施例11的汽车的前视图,其示出了支撑件14.1上的相机22、24和26,而相机32、34和36位于支撑件14.2上。该视图示出了平分线30.3,其将汽车一分为二并在基本水平的平面中延伸。因此,在该线30.3上方是汽车的上半部,而在该线下方是汽车的下半部。
133.图3a是图1a或图2a的实施例的汽车的内部视图。在该视图中,其示出了位于支撑件14.1(参见图1b)的内表面上的视频屏幕62或屏幕220(参见图22)。该屏幕与相关的相机22、24和26以及位于汽车该侧的侧视镜上的相机120通信。屏幕64或220联接至支撑件14.2。屏幕64与相机32、34和36以及在汽车该侧的侧视镜上的相机120相关。在该视图中,示出了虚线65.1和65.2。虚线65.1以竖直线在中间将汽车一分为二,从这个角度看,将汽车分为右半部和左半部。因此,屏幕62和64沿着支撑件14.1和14.2定位在汽车的右半部和左半部上并总体或基本在汽车的上半部且与挡风玻璃19相邻。
134.图3b示出了具有壳体80的至少一个屏幕62或220的前内部视图。还具有至少一个第一调节机构81、用于将屏幕拧紧和固定在适当位置的旋转螺钉82。旋转螺钉82将壳体部分83固定在球窝接头87周围。球窝接头87联接到轴88。轴88联接到板84。板84通过螺钉联接到内部框架86。因此,在该实施例中,屏幕系统联接至框架14.1的内部部分86,从而该可调节部分使屏幕62在运动上可调节。这种可调节的全向系统还类似于图11
‑
13所示。
135.图4a是图1a或图2a的实施例的汽车的内部视图。该视图示出了与相应的相机22、
24和26或相机32、34和36相关的屏幕62和64。屏幕62和64类似于屏幕220,并且联接到与支撑件14.1和14.2相邻的汽车。该视图还示出了总体在汽车上半部的位于平分线65.1两侧的屏幕。
136.图4b示出了图1a或图2a的实施例的汽车的内部视图。在该视图中,具有平分线65.1以及平分线65.2。平分线65.1是基本竖直的,而平分线65.2是基本水平的。在平分线65.1的两侧是屏幕,比如屏幕72或74,它们可以位于框架14.1和14.2的内部,并用于显示来自相机的图像。这些图像甚至可以是由多个相机(比如相机22、24、26、32、34、36或者相机100或120)创建的三维图像,这些相机可用于呈现具有深度的图像,也可用于向使用者提供判断行人或汽车可以位于距汽车的距离的能力。
137.图5是安装在后视镜上的相机的侧面透视图。例如,具有相机系统100,其包括相机主体102和透镜部分104,相机主体102联接至支架,比如支撑支架106。支架106联接至安装主体108。主体108联接至后视镜110。安装主体108可以联接至挡风玻璃。以这种方式,包括相机主体102的相机100可以定位在后视镜110的前面,使得使用者具有该后视镜的盲点可记录性和可见性。图6和7也示出了替代视图。
138.图8是侧视镜122的前视图,侧视镜122包括相机120。电缆比如电缆或线254(参见图19)可沿着臂119被进给到汽车12的车身中。然后将电缆联接到车辆的电气系统以及屏幕比如屏幕62、64、72、74、220或249中。
139.图9示出了该相机120的侧面分解视图。相机比如相机120可以放置在任何区域中。例如,侧视镜122包括配置为容纳安装凸缘121的安装表面。该相机120可定位成使得其角度和定向是可调节的。透镜主体123联接到安装凸缘121。透镜盖126配置为覆盖透镜主体123。透镜盖126包括透镜凸缘125和透镜盖部分127。透镜盖126配置为覆盖相机并保护它不受环境影响。
140.图10a示出了侧视镜的替代视图。例如,侧视镜122包括相机120,其中侧视镜122联接至臂119,臂119联接至汽车车身18。电缆或线可以通过汽车的电气和通信系统从车身18通过臂119进给到相机120。
141.图10b示出了用于侧视镜122的相机系统的侧面剖视图。该视图示出了内壳120.2,其设置在外壳12.1的内部。内壳120.2在外壳120.1内旋转。具有联接到透镜部分120.3的相机主体120.4。驱动马达120.5联接到相机主体120.4。轮子120.7和120.8联接到驱动马达120.5,并用于选择性地将视角或迎角即相机透镜120.3的方向驱动到特定方向。驱动马达120.5由电缆120.6驱动。电缆120.6由汽车内的电池或电气系统供电。
142.图11是屏幕系统200的侧面透视图。屏幕系统200包括前屏幕202、联接到前屏幕202的屏幕主体204。与屏幕主体204联接的是支架,比如包括至少螺钉调节器213的支撑支架。螺钉调节器213配置为拧入屏幕主体204的后端。屏幕主体204配置为保持屏幕的电子部件。
143.螺钉调节器213包括带螺纹的螺钉端211.1。可调节安装臂203联接到螺钉调节器213。可调节安装臂203包括可调节部分219,其包括夹具主体部分206、夹具臂208.1、第一端211和第二端217。第二端217朝向臂210和212延伸。可旋转t形连接218联接在臂210、212与第二端217之间。可旋转t形连接218包括螺钉或联接件207和209。臂210通过螺钉或联接件207联接到可旋转t形连接218。臂212通过螺钉或联接件209联接到可旋转t形连接218。可旋
转t形连接218可通过螺钉比如t形夹具螺钉218.1选择性地固定。该屏幕系统可以代替本文提到的任何屏幕系统使用,以使这些臂可以缠绕在支撑件14.1或14.2或者15.1或15.1周围。然后可以将屏幕选择性地联接到相机,比如本文提及的任何一个相机,比如相机22、24、26、32、34、36、52、54、56、100、120、250、390、580。
144.臂210包括多个不同部分,其中每个部分通过铰链联接在一起。例如,具有通过中间铰链部分210.2彼此联接的铰链凸缘210.1和210.3。这些铰链允许灵活的可旋转多维臂,然后可以将其缠绕在汽车的柱子、立柱或任何其他车身支撑部分上。另外,臂212包括具有凸缘的铰链连接器212.1和212.3以及铰链部分212.2。开口216位于臂212的端部。另外,开口210位于臂210的端部。开口216和214配置为缠绕在并联接到运动车辆的立柱或车身部分上,比如飞机、轮船、机动车辆或任何其他设备。这些开口允许将螺钉拧入汽车的柱子或车身中。
145.图12示出了该装置的直立视图,示出了屏幕200的前视图以及配置成容纳紧固件的开口216.1和216.2。另外,开口214可以插入在开口216.1和216.2之间以将端部系在一起。
146.图13示出了可调节部分219。可调节部分219包括主体215,其包括第一主体部215.1和第二主体部215.2。另外,还具有夹具主体部分206和夹具臂208。图14示出了该可调节部分219的侧面透视图。图15也示出了侧面透视图。
147.图16a
‑
16f示出了可调节主体部分219,其包括夹具208和夹具臂208.1。当夹具208以预定方式旋转时,它将夹具臂208.1驱动到夹具主体部分206中。图16b至16e示出了可调节部分219的不同视图,其中移除了第一主体部215.1和第二主体部215.2。如这些视图中所示,在夹具座237内定位有多个球窝接头236和238。当夹具臂208.1被驱动到夹具座237中时,它对球窝接头238和/或236施加压力,其中一个分别位于第一主体部215.1和第二主体部215.2内。这会将球窝接头夹紧在固定位置。本质上,因为具有可在球座237内移动的两个球窝接头,所以创建了多维易于可调节装置,其允许将屏幕定位在几乎任何角度和几乎任何位置。该全向双球窝接头系统类似于图3b所示的系统。
148.图17还以基本透明的视图示出了该可调节部分219的视图。该视图示出了联接至t形连接218的臂210和212。图18a公开了联接到可调节部分219的臂210和212,其中它们通过夹具208选择性地固定就位。另外,如该视图所示,还具有屏幕主体222和屏幕显示器224。当然,该视图是屏幕显示器224的后视图。
149.图18b是用于屏幕的框架型附件的视图。该袖带式附件包括主体部分246,其由任何合适的材料比如金属或塑料形成。主体可被制造成使得其至少部分或基本是柔性的,使得其可被扩大,然后选择性地围绕半圆形或圆形柱子卡扣,比如汽车或飞机座舱中的支撑件或框架,比如支撑件14.1、14.2、15.1或15.2。主体部分246联接到具有附接元件242和244的凸缘242和244。附接元件或凸缘242和244包括以下中的至少一个:螺钉、紧固件、钩环紧固件、夹子等。屏幕249联接到主体部分246。另外,相机248设置在屏幕249的相对侧。该主体部分246通过包括纵向轴线的第一轴线240.1被一分为二。纵向轴线240.1将该主体部分一分为二,使得屏幕249定位在基本中央区域中。另外,该主体部分基本是c形的或圆形的,以使其可以围绕竖直柱子或立柱安装。轴线240.2是横向轴线,并且也将主体部分246一分为二。在至少一个实施例中,主体部分246的延伸部比沿横向轴线的延伸部长。屏幕249可以代
替本文提及的任何其他屏幕使用,并且可以与本文提及的任何其他相机组合使用。当由柔性材料制成的主体部分246卡扣在柱子或立柱上时,凸缘241和243将主体部分保持就位。
150.图19是相机系统250的分解视图。相机系统250可以选择性地联接到屏幕显示器220。例如,在该视图中,具有透镜前部258,其联接到第二透镜部分257,第二透镜部分257联接到焦距调节器256。焦距调节器256配置为旋转以选择性地使相机聚焦。此外,还具有第一透镜部分255。第一透镜部分255位于透镜座251中。透镜座251联接到相机主体252。电缆254联接到相机主体的后端。简而言之,该相机系统250包括多级透镜部分255和257。另外,通过焦距调节器256,可以以多种不同方式选择性地聚焦相机。可以将该相机定位在汽车内部于后视镜上或在汽车外部于支撑件上或侧视镜上。电缆254可延伸穿过侧视镜的臂。如上所述,以连接到汽车的系统部件中且连接到屏幕,比如屏幕220。
151.图20示出了汽车的内部。例如,具有柱子14.1和14.2。屏幕220沿着柱子14.1、14.2定位。屏幕220或屏幕62或64可以联接到相机系统250。可替代地,屏幕可以联接到图8所示的相机120。
152.图21示出了汽车的内部,其示出了位于柱子14.1内部的屏幕220。
153.图22示出了沿着柱子14.2定位的屏幕220。图22还示出了屏幕220a,其也可以用于显示相机的场之一。也可以使用其他屏幕220b或220c。可替代地,投影仪220d可以坐落在仪表板上,并且还将相机的视图图像投影到挡风玻璃19上。
154.图23a示出了另一实施例的内部视图。在该视图中,具有屏幕或屏幕单元220,其具有屏幕面220.1。臂272和相机头270联接到屏幕面。相机头270的内部是电子地联接到屏幕单元220的相机。另外,锚固件260联接到屏幕单元主体220.2,锚固件260配置为将屏幕锚固到汽车比如挡风玻璃19上。锚固件260包括吸头,其可以通过吸力粘附到挡风玻璃19上。
155.臂262以及臂272都可以通过使用足够的力以类似手风琴的方式弯曲和调节,但否则是基本刚性的。
156.图23b是另一实施例的内部视图,其还公开了锚固件260、臂262、相机头270和相机臂272。然而,在该实施例中,具有调节主体280,其包括设置主体280内部的球窝接头284。还具有锁282,其可以包括螺丝锁,当松开时,它允许球窝接头284中的球移动和调节。当锁282被拧紧时,它将球在球窝接头中锁定就位。
157.图23c示出了另一实施例,其包括图23b的特征,而且还包括以下附加特征:立柱290和安装板292。安装板292配置为安装到支撑件比如支撑件14.1上。
158.图23d示出了另一实施例,其示出了安装板295,安装板295与安装板292的不同之处在于安装板295配置为具有多个螺钉,比如四个螺钉。在该视图中,示出了三个螺钉296、297和298。安装板比如安装板292或295配置为将屏幕半永久地安装至汽车。
159.锚固件285和260配置为也以非破坏性方式将屏幕和相机安装到汽车上。在图23a所示的实施例中,通过锚固件260只有一个安装点。在图23b所示的实施例中,具有由锚固件260和280表示的两个安装点。这两个安装点允许将屏幕安装系统压缩装配在挡风玻璃19和仪表板之间。实施例23c和23d允许三个安装点,从而允许来自三个不同角度的压缩,并在安装屏幕时提供进一步的安全性。因此,通过这些实施例,可以以安全可靠的方式将屏幕安装到汽车上。
160.图24a是用于轮船或飞机的座舱的视图。在该视图中,座舱设计370包括挡风玻璃
379以及分别安装在支撑件386和388上的屏幕或显示器382和384。另外,具有座舱仪表板的前面板,其具有方向盘以及多个屏幕372、374、376、378、394和396。这些屏幕372、374、378、394和396可以显示与相机相关的信息。在该视图中,具有平分线380.1,其将座舱基本沿纵向分为两半。因此,在平分线的两侧,具有联接到这些支撑件386和388的屏幕或显示器382和384。另外,这些显示器382和384位于座舱的上半部,如由从横向将座舱分为两部分的平分线380.2所示。
161.图24b是具有图24a所示的座舱的平面391的外部的视图。在该视图中,具有带有挡风玻璃379的主体397。平面的主体被虚线391.2横向地一分为二。该视图示出了相机390沿支撑件386位于平面的上半部。另一相对的相机位于另一支撑件388上。尽管平分线391.2沿基本水平轴线将平面一分为二,但平分线391.1竖直延伸并始于机舱的开始区域处,该机舱朝向飞机的前端定位。在该实施方式中,所有屏幕都具有诸如图11
‑
17所示的调节机构。
162.图25公开了另一新实施例500,其包括屏幕组件510、相机组件580以及将相机组件580与屏幕组件510连接的通道570。屏幕组件510至少包括屏幕主体或壳体512以及屏幕511本身。屏幕511容纳在屏幕主体512内。屏幕511后面是图36所示的电子部件。电缆520可以通过此处未示出的端口联接到屏幕组件510。
163.因此,利用这种设计,相机组件580可以位于支撑件比如支撑件14.1、14.2、15.1、15.2的一侧,而屏幕组件510可以位于支撑件14.1、14.2、15.1、15.2的相反侧。通道570然后延伸穿过门以在两个组件之间桥接。
164.图26示出了图25中所示的装置的侧面分解视图。例如,在该实施例500中,示出了具有设置在屏幕壳体512内的屏幕511的屏幕组件510。与图25一样,具有电缆520,其联接到屏幕的底部。联接或支撑支架550包括支架主体以及至少四个不同的支架插脚552、553、554和555。这些支架插脚从支架主体伸出,形成为大致l形钩。
165.这些大致l形钩配置成钩在屏幕主体的背面的内部。另外,螺钉558联接到联接支架550。另外,在联接支架550的内部设置有电缆狭槽559。电缆狭槽559配置成容纳电缆560。电缆560配置成联接到图36中更详细示出的电子部件。电缆560在通道570的内部延伸一直到相机组件580。通道570中的螺孔571配置为容纳螺钉558。因此,电缆560可以滑过电缆狭槽559,其中电缆560然后连接到屏幕组件510的屏幕主体512内部的电子部件。另外,可以将螺钉558拧入螺孔571中,以将相机组件580固定到连接支架550。然后可以将连接支架550联接到屏幕主体512,如图31所示。
166.图27示出了图25所示的实施例的侧后透视图。在该视图中,示出了连接支架550,其装配到狭槽或凹座521中。如该视图所示,示出了从相机组件580延伸的通道570。相机组件580包括相机581、相机面582和侧壁583。相机组件580还可以包括覆盖物,比如玻璃或透明覆盖物。如图所示,还具有将通道570连接到支架550的螺钉558。另外,如图所示,还具有将主体或壳体512连接到前板512a的支撑螺钉515、516、517和518。另外,如图所示,具有有延伸到开口530a中的卡530,开口530a将卡530连接到容纳在壳体512内部的母板。连接支架550紧密地安装在凹座521的内部。
167.图28是与图27所示的结构相似的侧面分解视图。在该视图中,示出了支架550,其示出为从屏幕主体512移除。插脚554和553示出为从支架550延伸出,其中这些插脚551、552、553和554可以配置成延伸到插脚开口中,比如插脚开口522.1、522.2、522.3和522.4。
电缆560可以延伸通过插槽559,然后延伸穿过开口524。
168.图29是屏幕组件510的后视图。在该视图中,具有螺孔525、526、527和528。具有插脚开口522.1、522.2、522.3和522.4,其配置成容纳插脚。另外,还示出了开口524。此外,开口529还配置为容纳电缆520。电缆520可以是电力和通信电缆的形式,比如以太网供电电缆(poe),其可以向和从屏幕/相机供电和通信,然后返回到如图38所示的中央车载计算机。
169.图30示出了系统的侧面剖视图,其联接至汽车框架中的立柱,比如立柱14、15或立柱590。立柱590可以是类似于立柱14.1、14.2、15.1和15.2的任何类型立柱。另外,立柱590也可以代表后视镜或侧视镜的表面。在该视图中,具有设置在屏幕壳体510内部的屏幕511。另外,具有与屏幕511通信的母板600a。电缆或线560与母板600a通信并延伸到设置在相机580内部的相机母板593。在相机壳体580的内部还布置有相机芯片601。
170.图31示出了另一实施例,其示出了图30的相同部件,然而,其包括形成用于为部件供电的电力线的附加线594。该电力线可以用作用于进给来自汽车的电力的进给,比如通过汽车电气系统。
171.图32示出了类似于图31的多相机安装的侧视图,然而,该实施例包括附加线594、附加相机壳体580a、基础母板593a和附加相机芯片601a。因此,通过这种设计,可以将多个相机与单个屏幕相关。单个屏幕可以包括至少一个按钮(包括在触摸屏中)或附加按钮511a(可以用作装置在不同相机之间切换的切换按钮。可替代地,两个或更多个相机可以用作在屏幕510上创建三维视图的装置。另外,这些按钮或虚拟按钮作为屏幕软件的一部分,可以在屏幕本身上呈现,用于指向和瞄准相机,比如相机580、580a、580b、580c(参见图33),它们都是配置为通过任何合适的装置比如通过图10b所示的驱动系统而以电子方式被驱动的相机,以及至少相机22、24、26和32、34、36、100、120。
172.图33示出了可以安装在例如侧视镜122(参见图10b)上的不同相机。例如,可以具有第一相机或相机主体580、第二相机或相机主体580a、第三相机或相机主体580b以及第四相机或相机主体580c。尽管这些相机可以采用进给到单个屏幕中的多个不同相机的形式,但至少一个相机比如相机580c可以定位在侧视镜122上的侧面位置,以便其横向延伸观察范围,以供使用者看到汽车的侧面,甚至看到后视镜的盲点中。这些相机也可以例如经由图10b所示的驱动系统来驱动。
173.图34是适配器的侧面透视图,其包括形成安装支架595的块适配器,安装支架可以预模制并预成型为特定的形状或结构,从而可以通过此结构补偿汽车结构的现有曲率。与该块适配器595联接的是位于该适配器结构内部的相机主体580。相机和屏幕系统的任何类型的组合在本文可以与该适配器一起使用。
174.图35是配置为容纳相机主体580的块595的侧面透视图。在该实施例中,具有包括适配器装置597的相机支座596,适配器装置597允许相机相对于水平轴线598旋转至将相机定位并对准在相机主体内部。可以调节或旋转相机支座596以松开或拧紧适配器装置597,以允许将相机选择性地定位在特定角度。通过这种设计,具有至少一个弯曲表面595a,其定位成基本与支撑相机580的表面相对。可替代地,图10b所示的驱动机构也可以与该类型相机一起使用。
175.图36示出了可以通过无线连接而连接到任何一个相机580、580a和580b的屏幕510。
176.图37示出了设备的优选实施例。电子部件600的该实施例包括相机芯片601、cpu602、数据转换器603、显示驱动器芯片604、lcd显示器605、闪存芯片606和微sd卡607,其可以包括图31所示的530。
177.相机芯片601是多种类型之一。在当前实施例中,芯片提供集成透镜、640
×
480全彩色像素阵列传感器或任何其他合适的分辨率、控制电子器件、8位数据输出总线和控制总线。cpu602向相机芯片发送命令以对其进行初始化并控制数据的捕获和格式。
178.通常,可以选择多种格式之一来表示全彩色图像。cpu602选择与显示驱动器604兼容的格式,以减少显示良好图像所需的数据量和卷积。
179.来自相机芯片的数据通过数据转换器603被移植到cpu602和显示驱动器芯片604。显示驱动器604可以接受多种宽度(8位、16位、24位)和格式(rgb656、rgb888等)的数据。当前实施例对相机芯片601进行编程以发送rgb656格式的图像数据,其由包含5位红色信息、6位绿色信息和5位蓝色信息的2个字节构成。显示驱动器604可以接受16位格式的该数据;由于相机芯片以8位宽度输出数据,因此数据转换器603用于将8位数据转换为16位rgb656格式数据。显示驱动器604包含足够的存储器以存储至少一帧显示数据。
180.显示驱动器604具有许多寄存器来控制lcd显示器605的外观,因此它使用与数据转换器603相同的总线连接到cpu602。cpu602在开始图像显示之前对这些寄存器进行编程,并且还在每个显示帧的开始处向显示驱动器604写入命令,以描述来自数据转换器603的即将到来的数据将显示在lcd显示器605上的位置。
181.数据帧由信号vsync和hsync以及cpixclk定义。当要从相机芯片601输出图像帧时,vsync设置为高。图像的每一行由hsync限定,当有效像素数据在相机芯片601的数据输出上可用时,hsync变为高。当数据行结束时,hsync变为低,并发出新的数据行即将开始的信号。cpixclk使相机芯片601发送的数据的每个字节高频脉冲。cpu602可以接受该数据以将帧保存到微sd卡607,或者可以通过数据转换器603将该数据发送到显示驱动器芯片604。
182.捕获和显示图像帧所需的事件顺序是这样的:cpu602监视来自相机芯片601的信号vsync。当cpu602检测到vsync为高时,cpu602用将被写入lcd显示器的数据的地址对显示驱动器604进行编程。一旦对此进行了编程,cpu602将激活数据转换器603。数据转换器603接受hsync和cpixclk,并使用这些信号以及来自相机芯片的数据信号来组装16位宽的rgb656字,然后将该字写入显示驱动器芯片604。显示驱动器芯片604获取这些rgb656并将它们顺序地存储到其内部帧存储器中。显示驱动器芯片604使用帧存储器生成信号dvsync、dhsync、pixclk和24位数据(红色、绿色和蓝色分别为8位)以显示在lcd显示器605上。
183.cpu602继续监视来自相机芯片601的信号vsync。当vsync变低时,帧已经完成,并且cpu602关闭数据转换器并开始寻找新的数据帧。当cpu602看到vsync再次变高时,它将再次开始显示序列。这提供了来自相机的完整运动数据,以显示在lcd显示器605上。
184.lcd显示器605包括用于设备的触摸屏接口。该接口允许使用者从相机芯片捕获图像或视频到微sd卡607。该图像可用于事件的标识或验证。闪存芯片606保存可以显示在lcd显示器605的一部分上的图像,并且包括虚拟按钮、帮助指令或用于设备操作的一般信息。cpu602可以生成可以显示在lcd屏幕605上的信息,而不是视频或作为视频显示的附件。另外,与cpu联接的还有其他可选部件。
185.例如,可选部件包括wifi芯片609,其可用于允许相机和cpu602与另一计算机网络
通信。另外,可以具有电池610。还具有联接到cpu602的以太网连接端口611。其他可选部件可以包括传感器618。传感器618可以是以下传感器中的任何一个:rfid传感器、运动传感器、门半开传感器、指纹扫描仪、热传感器和接近传感器警报器。另外,还示出了sim卡616和生物读取器617。还可以存在音频扬声器或麦克风621,其中使用者可以通过使用音频扬声器和对应的麦克风进行通信而彼此通信。该音频扬声器和麦克风可被嵌入到屏幕组件510中。还可以具有gps系统619a,其可用于接收gps系统并与之通信以提供用于汽车或运动车辆的位置。图37所示的电子设备可以在本文公开的相机和屏幕组合中的任何一个中使用。
186.最终,该系统可设计为包括可配置为具有夜视相机和红外传感器的相机。图38是图1a、2a、3或4的实施例的示意性框图。在该视图中,具有联接到聚合器400的相机22、24和26。聚合器400联接到视频压缩设备410。视频压缩设备410具有到至少一个屏幕62、64或40或者屏幕72、74或者屏幕220或249的输出。另外,与聚合器420联接的是视频记录器420,其配置为选择性地记录从聚合器400接收的视频信号。因此,该设备也可以用作黑匣子视频记录器。用于图5的实施例的相机和屏幕也可以包括在该框图中。如该视图所示,具有第一设备401,其充当用于诸如速度、定向、由gps系统618a提供的gps以及其他坐标的信息的记录器,以用于附加黑匣子记录。另外,具有另一设备402,其允许该设备联接到外部云存储设备或至少与之通信。因此,该设备包括诸如sim卡之类的无线通信元件比如sim卡616或其他无线通信设备。另一可选特征是通信设备403,其配置为与汽车通信以自动停止汽车。可以在某些情况下预设该设备403,比如当它在人行横道或其他障碍物中观察行人时。可以将设备403连接到汽车的车载计算机中,以自动制动汽车来阻止汽车撞击人或物体。然后,该观察设备可以自动关闭汽车或禁用加速器,以防止人行横道上的一方被撞。本质上,该设备403从聚合器400读取视觉信息,然后从该信息处理图像。一旦它从该聚合器400读取信息并识别该信息,则其将该信息发送到汽车计算机上以禁用汽车或禁用加速器。
187.另外,另一相机控制设备404配置为控制相机,比如相机22、24和26或者相机32、34和36、52、54、56或者相机100、120、250或580。这些相机中的每一个都可以在其主体设备中控制焦点、摇动、倾斜、缩放等。设备404因此配置为控制这些相机中的每一个的摇动、倾斜、缩放、焦点,并且配置为通过聚合器400进行通信,以便这些单独相机中的每一个都受到控制。这些相机的控件可以位于汽车的仪表板中,也可以位于汽车的方向盘上,或者位于上述任一屏幕上。
188.另外,联接到聚合器400的是车载汽车计算机,其与该聚合器通信来自汽车的所有信息,包括汽车的状态。另外,位于汽车上的任何控件都可以通过汽车的车载计算机405进给到视频聚合器400,然后进给到设备401、402、403或404中的任何一个上。
189.聚合器400以及直接或间接联接到聚合器400的部件以通信方式以及以电力方式联接到汽车的车载计算机405,以在这些部件之间传递信息和电力。
190.这些相机中的每一个也可以由相机控制装置或透镜404控制,使得这些相机可以渲染红外、热、夜视或本领域已知的并且由使用者请求的任何其他类型的视图。
191.这些组件中的每一个都可以通过有线连接相互通信。可替代地,这些部件中的每个(比如相机22、24、26、32、34、36、52、54、56、100、120、250、580)可以包括相关的无线收发器,它们也以无线方式与也选择性地具有无线收发器的任何一个合适的屏幕进行通信,比如屏幕249、220、72、74、62、64、40或511。可以通过无线互联网协议比如wifi、蓝牙或任何其
他合适的无线通信协议进行通信。
192.因此,该系统被设计为允许以有线或无线方式从多个不同的相机到多个不同的屏幕进行通信和控制,以允许使用者在不同的盲点中观看。另外,该系统允许安装和定位多个不同的屏幕或相机,其中这些屏幕和相机可以围绕运动车辆定位。
193.图39a示出了汽车10的视图,其包括仪表板表面701,该仪表板表面701具有定位在其上的至少一个投影仪700。还具有另一投影仪710,其联接到汽车(在这种情况下联接到汽车的遮阳板)。另外,具有反射和/或半透明膜712,其可以由任何合适的材料制成,比如粘附到汽车挡风玻璃711上的基本半透明和/或透明的聚合物。粘合剂可以是静态粘合剂或实际的基于化学物质的粘合剂的形式。另外,在仪表板表面上可以是感应板701.1,其用于选择性地对投影仪充电或至少向投影仪提供能量。感应板配置为由汽车提供动力,同时通过能量的电传递将电荷扩展到设备。
194.图39b示出了投影仪700的后透视图。投影仪700包括主体部分701、设置在主体部分中的连接器703。连接器可以是任何合适的连接器,比如fidmi连接器。fidmi连接器既可以用作电源连接器,也可以用作媒体连接器。从主体伸出的是投影仪透镜704。还具有通风孔707,其允许来自投影仪的热量散发。读卡器连接705也设置在主体部分702的内部。图39b示出了与投影仪700基本相同的投影仪710的视图。还示出了安全孔108.1,其允许将设备向下夹在车辆的仪表板上。
195.图40a示出了位于汽车10的遮阳板上的投影仪710的视图。反射膜712位于挡风玻璃711上。另外,还具有后视镜718,其还包括位于后视镜上的相机719。相机配置为将图像进给到投影仪700或投影仪710。投影仪700和710都可以独立操作以在膜712上显示图像,或者它们可被同步以在膜712上显示单个合成图像。膜712可以在其周围具有条带,其中该条带形成用于投影仪的引导件,以将其图像提供在膜上。该条带可以是电磁条带的形式,其为投影仪提供反馈,以将投影仪的方向和聚焦引导到膜上。
196.图40b示出了投影仪700的另一透视图,其示出了位于主体702中的透镜704。另外,从主体702的侧面伸出的是脚709,其配置为将主体安置在仪表板比如仪表板701上。另外,该投影仪还可以包括激光测距仪708,其配置为将送出光束到膜以提供光束聚焦投影仪的距离或范围。
197.图40c示出了另一实施例,其示出了球状短距投影仪透镜704.2,其用于提供图像到膜上的广角投影。这种鱼眼透镜是球状的,可以使图像在广角方向上延伸,尤其是在投影仪的上方和下方。
198.图41a示出了位于仪表板701上的另一三维投影平面720的视图。三维投影平面720包括基础部分722,其形成用于不同投影仪724、725、726和727的安装表面。这些投影仪可以投影到基础部分722上的反射表面上,该反射表面基本是平面基础表面,其配置为与车身表面一起创建反射表面。投影仪724、725、726和727的相交图像配置为创建定位在汽车730周围的三维3
‑
d图像。因此,以这种方式,该设计允许使用者具有车辆周围的所有主体(汽车以及人和动物)的全三维图像。在本发明的至少一个实施例中,基础部分722的表面723可以是平坦的。在至少一个附加实施例中,基础部分的表面可以由多个不同角度的反射表面形成。
199.在另一实施例中,投影的车身将简单地是三维全息图像。
200.图42a示出了位于汽车的仪表板上的投影平面720。该视图还示出了位于后视镜
718上的相机719。另外,附加相机也可以位于侧视镜731上。该附加相机可以与相机719结合使用,也可以替代相机719。
201.图42b示出了三维投影仪平面720的前透视侧视图。例如,该视图示出了基础部分722上的反射表面723。该反射表面可以具有不同的延伸角度,使得基础部分不完全是平面的。因此,可以使用不同的投影仪724、725、726和727在这些不同角度的表面上投影以创建图像及图像的反射来创建三维图像的外观。
202.图43a示出了具有位于仪表板表面701上的另一实施例740的汽车的视图。该实施例在图43b中被更详细地示出。
203.因此,图43b示出了实施例的图像,其是容纳在壳体741内部的屏幕742。具有反射屏幕743,其从屏幕742以一定角度向上延伸。该反射屏幕743配置为反射屏幕742中所示的图像。该屏幕充当投影仪,其显示从屏幕到反射屏幕743的图像。由于屏幕742配置为创建反射图像,因此屏幕上呈现的图像被修改为使用者可在屏幕743上读取。另外,该设备经由适当的电缆连接(比如配置为向设备提供电力和通信的以太网连接)连接到电缆744。在至少一个实施例中,反射屏幕743的表面由基本透明或半反射的表面制成。在另一实施例中,它可以是反射屏幕。因此,如虚线所示,还有另一备用屏幕也可以使用。该备用屏幕743.1是与屏幕743分开向下折叠的实心备用屏幕。该备用屏幕743.1位于图44b所示的单独铰链746.2上。
204.图44a示出了位于使用者的仪表板上的设备740。该视图还示出了侧镜731,其定位有相机732。如上所述的该相机可以与相机719或汽车中的任何其他相机一起工作,或者该相机可以独立于该相机工作。
205.图44b示出了设备740的后视图,其包括主体部分741、屏幕743、具有三个主要部分的铰链746。首先具有第一板746.1、铰链部分746.2和第三板746.3。还具有位于主体部分内部的读卡器747,其允许图像的记录和图像的存储。因此,该卡可以形成用于汽车记录的“黑匣子”。
206.图45示出了另一实施例,其示出了投影仪700,该投影仪配置为投影到汽车10的挡风玻璃711上的反射膜713的屏幕上。
207.图46示出了具有反射膜713的投影仪700的后视图。该视图还示出了具有相机732的侧视镜731。膜713示出为小于膜712,使得显示必要信息所需的图像可能不需要与膜712所示的图像一样大。因此,膜712或713可以具有任何合适的尺寸。
208.图47示出了具有另一实施例760的汽车10,其具有较小的屏幕761。该设备位于仪表板701上。
209.图48示出了具有较小屏幕761的设备的相反视图。该设备可以采用诸如智能电话之类的便携式电话的形式。
210.图49示出了定位在汽车10的挡风玻璃上的另一装置770。该装置770在图50
‑
52中被更详细地示出。例如,如图50所示,存在具有凹部的装置770。图51示出了不同版本的屏幕770。这些不同的屏幕具有屏幕表面771.1、772.1和773.1。这些屏幕还具有分别不同的屏幕主体771.2、772.2和773.2。
211.图52示出了这些主体的相对侧。例如,屏幕771包括第一相机771.3和凹入部分771.4。该凹入部分包括侧屏蔽面板771.5。屏幕772包括两个不同的相机772.3和772.4以及
凹入部分772.5。屏幕773包括相机773.3。该设计包括凹入部分773.4和侧壁773.5。这些不同的设计配置为允许这些屏幕和系统在位于汽车挡风玻璃上时以不同角度记录活动。这些相机中的每一个都可以沿不同方向枢转或旋转,以允许使用者不同地观察。在一实施例中,相机可以用手移动。在另一实施例中,可通过使用触摸屏(比如触摸显示屏)的远程控制或通过其他远程控制装置(比如操纵杆)来移动相机。
212.图53a示出了另一实施例780的视图,其包括附接到屏幕783的主体782的弯曲屏幕781。还具有联接到主体部分782的电缆连接784。
213.图54a示出了装置780的后视图,而图54b示出了弯曲的屏幕781的视图。该屏幕是弯曲的,以由于反射屏幕的凹度而帮助在屏幕上创建三维(3
‑
d)图像。另外,该视图还示出了设置在主体782内部的卡连接786。
214.图55示出了用于部件的计算机化网络的替代实施例,其被设计为适于以上标识的实施例中的任何一个。例如,在该实施例中,具有计算机800,其配置为协调由任何一个相机810获取的信息。在至少一个实施例中,该计算机包括存储器801,其配置为存储由至少一个相机比如相机810拍摄的图像和运动图像。相机810可以是以上标识的相机中的任何一个,例如分别在图42a或图44a中所示的相机719或相机732。具有可选传感器812,其可以放置在车辆周围并且可以用于与相机810一起确定物体的存在。这些传感器可以发送红外光束、wifi信号或确定车辆周围是否存在物体的任何其他类型的合适信号。另外,具有可选投影仪814,其可以是上面列出的任何形式的合适投影仪,比如但不限于投影仪设备700或710。此外,具有可选屏幕815,其可以采用上面在以上任何一个实施例中提到的任何合适屏幕的形式。另外,与计算机800联接的是电源816,其配置为对计算机800供电。
215.如果存在投影仪814,则可以具有可表示投影传感器708的投影传感器817,其用于允许投影仪基于距屏幕的距离适当地聚焦图像。
216.还具有可选通信模块,其可以包括wifi或蓝牙通信模块818或蜂窝通信模块819中的任何一个。这些通信模块允许将来自计算机800的信息传递给其他部件,比如智能手机或服务器。
217.图56a示出了用于相机的设计的框图,该相机可以是可用作任何上述相机的相机的示例,比如相机100、120,并代替图37中的相应部件。例如,具有实施例830,其具有相机芯片和分立透镜831,其联接到中央处理单元(cpu)832并与之通信。该cpu832联接到ram存储器833,并且还联接到外部闪存836和可选微sd卡837形式的外部或可移动存储器。另外,显示驱动器芯片834联接到cpu并与该cpu通信,并且也与lcd显示器835通信。lcd显示器也与cpu通信。图片和动态视频可以记录在计算机800的内存801上的内存中,也可以记录在sd卡837或外部闪存836上。
218.相机可以是cmos e2v相机,具有任何合适的分辨率比如1280
×
1024的hd分辨率、8位分辨率深度和1.3兆像素的内存。传感器型号可以是ev&6560bb或ev76560b。透镜可具有4.2mm的焦距和f3.0的相对光圈,以创建1/2.5“的相对传感器尺寸,总长度约为21.50mm,视角为69度
×
51度。
219.透镜的示例在图56b中示出,示出了透镜840,其保持器或支架841的支架尺寸为m12
×
0.5mm。注意,该相机和透镜系统仅仅是一个实施例,其是优选实施例,但权利要求书不限于在此引用的任何规格。
220.图57是示出了使用例如上面列出的部件来控制汽车或车辆的步骤的流程图,这些部件包括但不限于在图55甚至图56中列出或引用的部件。
221.例如,图57从步骤s820开始,该步骤包括例如使用相机810或传感器812中的任何一个来读取环境的周围。另外,其他部件比如wifi通信模块818或蜂窝通信模块819可以用于跟踪到周围区域中的其他物体的位置或距离。此外,任何一个相机810也可以用于识别周围区域中的物体。所有这些部件可以将信息进给到计算机800中,计算机800然后配置为读取这些视觉图像和感官线索以识别车辆周围的物体。
222.接下来在步骤s821,系统特别是计算机可以在步骤s821中识别视觉触发,以识别驾驶员是否关心物体并且识别车辆与这些提出的物体的距离。
223.接下来在步骤s822,系统还可以识别音频触发,以从该信息中确定车辆周围的操作。因此,传感器812也可以是音频传感器。
224.接下来在步骤s823,系统也可以通过传感器识别物理触发。该物理触发例如可以是车辆上的物体的物理接触,其导致传感器比如传感器812做出反应。因此,这些传感器也可以是触觉传感器的形式。
225.接下来在步骤s824,包括计算机800的系统可以发送警告,其可以是从投影仪814发送的指示或者发送到屏幕815的信息。此外,该警告也可以是通过语音警告或通过车辆音频系统811发出的蜂鸣声的音频警告的形式。
226.接下来在步骤s825,系统可以提供触发通信,比如屏幕上的主体图像或者主体位置或主体形状或主体类型的语音指示。
227.接下来在步骤s826,系统可以与车辆的导航系统通信,以在导航系统上识别任何潜在触发的位置。
228.接下来在步骤s827,包括计算机800的系统可以使车辆停止运动以防止使用者发生任何事故。
229.因此,上面公开了许多不同的实施例,这些实施例被设计为提供一种独立的车辆警告系统,其配置为警告使用者与其周围其他物体(比如其他汽车或行人)的即将发生的碰撞或交互作用。应当注意,任何一个上述实施例中的任何一个上述相机都可以用于任何一个其他实施例。另外,任何一个上述实施例中的任何一个上述屏幕都可以与其他实施例一起使用。此外,除非声明为系统内所必需,否则具有任何一个上述实施例的任何一个上述部件都应被解释为是可选的。
230.另一实施例包括具有另一屏幕的设计,该屏幕是弯曲屏幕2002,其配置为装配在汽车1000的立柱2001周围。在这种情况下,屏幕2002基本覆盖所有立柱或整个立柱。为了给屏幕2002供电,具有电缆2006,其向下延伸到汽车1000中并且连接到汽车的内部计算机系统。因此,屏幕2002连接至汽车以用于供电以及与相关的相机(比如相机系统250或本文公开的任何其他相机系统)通信。
231.图58b示出了弯曲屏幕2012的俯视图,其示出了具有连接器2004和2010的连接点,连接器2004和2010配置为将屏幕2002固定至立柱。这些连接器可以是本领域已知的任何合适类型的连接器阵列,比如基于公的连接器、基于母的连接器、钩环紧固件、立柱、粘合剂、铆钉、螺钉、螺母和螺栓或者任何其他类型的合适连接器或紧固件。至少一个母板2008连接到屏幕的背面,该母板2008连接到电缆2006。母板2008从电缆2006接收电力以及从电缆
2006接收通信以从相机比如本文公开的任何一个相机接收信号。屏幕位于立柱2001上,以便提供立柱后面的场的图像。
232.如图58c所示,以虚线示出了该视场,其由视场2020示出。相机的该视场然后补偿驾驶员的视力损失,因为立柱比如立柱2001阻挡了驾驶员的视场。该视场至少基本由将汽车1000i一分为二的横向线和形成汽车的左前象限的汽车1000ii的纵向线界定。还可以覆盖其他象限,比如视场2021中的右前象限。可以使用不同阵列的相机,比如位于右前立柱中的相机2100、2102和2014,以提供右前视场2021的视场。可替代地,嵌入左前立柱中的相机2016、2108和2110配置为在场2020中提供视场。
233.图59示出了具有嵌入式相机2005a和2005b的侧视镜2003a和2003b,该嵌入式相机2005a和2005b还配置为提供图58c所示的汽车1000的相应视场2020和2021。另外,该视图还示出了附加相机1090,其成角度以指向上方,使得驾驶员可以看到他上方的光。相机倾斜于后视镜1091,使得坐在汽车车轮后方并已拉起停车灯但其视场被汽车车顶挡住的驾驶员仍然可以通过在屏幕(比如后视镜)中观察相机1090的视场而访问光的状态。该视场可以使得其是直接在汽车(比如汽车1000)上方的视场。
234.图60公开了具有相机1090的汽车1000的视图,该相机1090定位成从后视镜1091指向上方并且定位成指向穿过挡风玻璃1094并指向相机1092的视场上方的位置,该相机1092也位于后视镜1091上。通过这种设计,相机1090形成用于将后视镜1091安装到挡风玻璃1094的基座的一部分。因此,通过这种设计,相机配置为当驾驶员位于交通信号灯下方时向驾驶员提供交通信号灯的全景,从而当在停车灯处停下来时,当灯变成绿色时,驾驶员可以放松而不会疲劳地看着。
235.图61示出了新的实施例,其公开了在侧视镜122上与相机120相邻定位的吹风机系统1200。具有用于清洁相机的盖的相机清洁系统。相机清洁系统可以包括任何合适的清洁系统,比如吹风机或刮水器。例如,示出了侧视镜122经由臂119连接至立柱或柱子18。吹风机系统1200可用于清除相机120的前屏幕上的任何碎屑、凝结物、水或其他撞击。吹风机系统1200可以是弯曲臂的形式,其从侧视镜壳体比如在图62中所示的壳体122伸出。吹风机系统可以配置为在相机120的屏幕或前盖上吹气。可替代地,相机120可以具有刮水器1210,其配置为擦拭任何撞击或任何其他类型的碎屑或来自该屏幕前面的凝结物。刮水器1210从壳体122伸出并由设置在壳体122内部的驱动臂驱动。
236.另外,如图62所示,还具有附加相机清洁系统,其配置为清洁相机的盖,比如玻璃或透明盖。清洁系统包括吹风机系统,其包括吹风机1211,该吹风机1211配置为通过在盖的内表面上吹气来清洁相机壳体的内部和相机盖的内表面(例如参见图64中的盖580d)。通过这种配置,吹风机向玻璃表面的内部吹气,以清除相机盖内部的任何碎屑或湿气。
237.图63示出了吹风机系统和壳体的更近视图,其中示出了外部吹风机1200和内部吹风机1211。内部吹风机1211位于相机壳体1212内部,而吹风机1200联接至外部主体比如镜壳体,并且配置为在相机盖比如盖580d的外部吹气。
238.图64示出了设置在壳体122内部的吹风机系统的另一实施例。例如,示出了与相机壳体580a、580和580c相邻设置的吹风机通风口1200a、1200b、1200c。这些吹风机通风口1200a、1200b和1200c中的每个通过由电源线1251供电的主吹风机系统1250进给。主吹风机配置为提供通过这些通风孔吹出的空气,以清除任何一个相机580、580a,580c甚至相机
580b的任何碎屑或其他障碍物。主吹风机系统可以通过在相机(参见图62)的壳体内部吹气而经由吹风机通风口1200a或外部盖580d的内表面将空气或其他气体甚至清洁流体吹到相机的外部盖580d上并且到盖的内表面上以清除任何碎屑或凝结物。
239.图65示出了类似于相机盖580d的另一相机盖的视图,但该相机盖具有嵌入在盖中的多个加热场。加热场为电阻丝的形式,电阻丝被汽车产生的电力加热。加热电线比如电线1402、1404、1406、1408和1410配置为从汽车电气系统接收电力。电线被流过线路的电功率加热,线路中的电阻导致它们发热。一旦这些线路被加热,它们就可用于清除盖的前面或外部或者盖的内部的任何凝结物、湿气或冻结的材料。这样,如果相机上的盖上形成任何凝结物,则相机上的盖就不会起雾。
240.图66示出了其上安装有新的灯1500和1502的汽车的俯视图。这些灯例如在图67中示出,并且可以由汽车中的使用者选择性地打开或关闭。例如,第一灯具1500具有基本彼此垂直的两个侧,第一侧1500a和第二侧1500c。在第一侧1500a的内部是第一灯1500b。在第二侧的内部是第二灯1500d。对于灯1500,第二灯1500d是前灯具,主要用来照亮汽车前方的道路和周围区域。侧灯具1500b主要用于照亮汽车侧面的区域。
241.类似地,对于灯1502,其具有两个侧,即第一侧1502a和第二侧1502c。第一侧1502a具有第一灯1502b,第二侧1502c具有灯1502d。通过这种设计,第一侧1502a容纳前灯1502b,而第二侧1502c容纳侧灯1502d。
242.对于两个灯,都可以通过以下至少一种方式来激活侧灯。首先,侧灯可以由使用者通过设置在汽车内部的选择性开关来打开。可替代地,当使用者推动或激活他或她的转向信号时,侧灯将提供一致的白光流(非转向信号灯)以照亮汽车的侧面。可替代地,如果使用者开始转动他或她的方向盘,则一旦方向盘旋转超过预设点就可以激活侧灯。可以激活灯的另一种方式是通过相机比如相机120来识别在与汽车相邻的人行横道中的一方(人)或与汽车相邻的另一汽车。然后可以使用此灯通知人行横道上的人该汽车即将转弯。然后,由汽车提供的指向汽车侧面的亮光可以用于使驾驶员知道人行横道上的人的位置。该亮光还将向人行横道上的任何一方发出警告,提示汽车正在转弯。
243.这些侧灯中的每一个可被选择性地单独激活,使得位于汽车第一侧的人将接收到亮光,但相对定位的侧灯则将不被激活,以免打扰其他驾驶员。同样,在特定方向上转动车轮或发出转向信号只会激活汽车一侧而不是另一侧的侧灯。
244.本发明的另一实施例涉及形成为嵌入在立柱比如立柱1602中的嵌入式屏幕系统1600。例如,具有电子设备1604,其从具有多个不同的面比如面1606、1608和1612的立柱伸出。还具有前屏幕1614,其配置为以驾驶员更容易看到的角度在屏幕上显示视图。屏幕1614上的观察可以与嵌入到立柱比如立柱1602中的相机或嵌入到侧镜比如侧镜1611中的相机相关。图69是设备1600的侧视图,其示出了底面1612,该底面1612从立柱延伸出足够的距离,使得视频屏幕1614可以具有基本竖直的定向。
245.图70还示出了该视图,其中示出了侧面1606和1612,其从立柱1602伸出,以使得屏幕1614基本竖直。
246.图71是实施例的侧视图,其示出了从立柱1602延伸出的侧面1610。还示出了与屏幕1614相邻定位的侧视镜1611。该视图还示出了屏幕1614的定向基本竖直,以使得它易于驾驶员观察。
247.图72示出了另一实施例1640,其示出了通过螺钉1644和1646固定到立柱1602上的后板1642。还具有支撑立柱1648和调节器1649,该调节器1649联接在立柱1648和屏幕1650之间。
248.图73是实施例1640的侧视图,其示出了具有多个开口1645和1647的后板1642。开口1645和1647配置为连接至螺钉1644和1646。此外,该视图还示出了立柱1648以及调节器1649。调节器1649配置为旋转以允许以全向方式对设备调节。调节器1649配置为选择性地将球固定在球窝关节中。
249.图74是另一实施例1660,其具有弯曲部分1662和多个不同的螺钉1664和1666。还具有从该弯曲后屏幕延伸出来的立柱1668。联接到该立柱的是调节器1669(参见图75),其类似于调节器1649。该调节器允许围绕球窝接头旋转,该球窝接头配置成选择性地将屏幕固定在特定的定向上。屏幕主体1651以及屏幕1650联接到调节器1669。屏幕1650配置为与另一相机通信,比如安装在侧视镜上的相机,比如图61中或立柱中的相机120,比如相机22、24、26或相机32、34、36。弯曲后板1662配置成围绕立柱弯曲,并通过插入立柱与挡风玻璃之间的立柱中的楔形开口中而固定在立柱的一侧。在另一端,弯曲后件也配置为通过螺钉1664和1666固定。这些螺钉插入立柱1602中并将屏幕锁定在其中。
250.图76是用于将屏幕220安装在支撑件或柱子14.1上或附近的可滑动轨道系统的另一实施例的透视图。例如,公开了一种轨道1690,其安装在支撑件或柱子14.1与挡风玻璃19之间。该轨道1690允许可锁定基座1693沿轨道1690上下滑动,从而使屏幕220沿轨道1690上下移动。可以将可锁定基座1693向下夹在轨道1690上,以便将该基座1693沿该轨道锁定就位。可锁定基座1693包括可旋转球,其拧在带螺纹的螺栓上时允许在轨道1690上进行压缩锁定。臂1692联接至可锁定基座1693,该臂1692以上述任何方式联接至屏幕220的后部。另外,在该视图中还示出了侧窗21。
251.图77a是另一实施例的侧视图,其示出了安装有头枕的监视器,其中在该实施例1700中,具有头枕1704和柱子1711,其被示为汽车的标准部件。头枕1704经由立柱1708联接至汽车座椅1709。联接至头枕的是监视器或屏幕组件1702,其包括框架1707以及监视器屏幕1706。监视器屏幕配置为显示上面列出的任何一个相机的视频显示,包括但不限于相机120和/或相机52、54、56(参见图2b)。通过这种设计,框架1707与头枕1704联接在其中,使得屏幕嵌入头枕的内部或定位在头枕的外表面的顶部。监视器组件1702的电源可以通过汽车座椅1709提供,并通过立柱1708向上设置,并作为低压电源进入头枕。可替代地,监视器或屏幕可以由可充电电池供电。可以对相关的相机进行定向,以使其显示位于柱子1711后面的物体的位置。
252.图77b是图77a所示的示例以及图79a
‑
79c所示的示例的电子设备的示意性框图。例如,屏幕组件1702配置为至少在一个实施例中经由从框1701延伸通过座椅1709、通过立柱1708、通过头枕1704并进入屏幕组件的电气和/或通信线路联接到主电气和通信块。可替代地,对于图79a
‑
79c的至少一个实施例,电力和通信线路可以从汽车的主电子块1701延伸通过座椅1709、通过立柱1708、通过板1725并到达屏幕组件1720。此外,对于两个实施例,联接到主电气/通信模块的是相机52、54和56。因此,电力和通信从块1701延伸到相机52、54和56中,从而为这些相机供电。另外,来自这些相机52、54和/或56的通信从这些相机经过块1701、经过座椅1709、经过立柱1708到达头枕1704,然后是屏幕组件1702,或者到达支架
1725,然后是屏幕组件1720。
253.图78示出了来自这些屏幕的相关相机的视场。该视场沿着轴线1800i,其横向于汽车的纵向轴线1800ii。不同的视场1801和1802示出了可能被柱子1711遮挡的视图。因此,汽车的驾驶员在汽车的其他盲点中可以看到汽车侧面的视图。
254.图79a是另一实施例的侧视图,示出了安装有可调节头枕的监视器。在该视图中,示出了柱子1711以及头枕1704。头枕1704搁在立柱1708上。新的实施例是屏幕组件1720,其包括框架1722和屏幕部分1723。该实施例1720搁置在与适配器板1725联接的立柱1726上或附接至其。另外,具有可旋转调节锁1724,其与立柱1726联接,并且在被拧紧时其将屏幕组件1720锁定就位以防旋转。然而,当锁1724被松开时,它允许屏幕组件1720旋转。通过该实施例,相机比如相机120和/或相机22、24、26或相机32、34、36可以无线地或以有线方式将进给从这些相机进给到屏幕1723中。另外,用于该实施例的电力被进给通过座椅1709并向上通过板1725然后通过立柱1726并进入监视器或屏幕组件1720。可替代地,用于屏幕组件的电力可以通过可充电的电池。
255.图79b是图77的实施例的前透视图。该视图示出了柱子1711以及座椅1709,其中头枕1704支撑在座椅1709上。板1725示出为联接至立柱1708。还示出了座椅1709的另一侧部1703。框架1722示出为围绕着屏幕部分1723。如图所示,框架1722和相关的屏幕部分均未直接附接到头枕,而是附接到立柱1726,然后通过锁1724可调节。框架1722示出为与头枕1704间隔开一定距离,以允许框架1722和屏幕1723旋转,使得屏幕组件可以以任何合适的角度定位,这将有助于驾驶员看到屏幕组件1723的屏幕1723。
256.图79c是图79a所示的实施例的顶部透视图。在该视图中,示出了框架1722,其联接到立柱1726并且邻近锁1724设置。锁1724联接到立柱1726,并且配置成选择性地锁定框架1722以防旋转或运动。另外,板1725示出为具有多个孔1727和1728,其配置为接收相关的立柱1708。
257.图80
‑
84示出了另一实施例1730的侧视图。在该实施例中,具有屏幕1731和联接到柱子1711的相关框架1732。通过这种设计,作为屏幕组件的实施例1730联接到柱子1711中。屏幕组件1730配置为与相机120和/或相机52、54和56通信,相机向如图77所示的该屏幕组件提供视觉进给。这些不同的视图示出了屏幕1730可以沿着柱子1711安装在任何合适的高度。
258.图85是另一实施例的侧面透视图。在该视图中,示出了柱子1711,该柱子1711具有联接至其的屏幕组件1740的另一实施例。该屏幕组件具有联接至板1745的立柱1742。板1745具有将板联接至柱子1711的螺钉1743和1744。该屏幕1740接收来自相机52、54和56的进给并提供视角,比如图77所示的观察范围1801和1802。
259.这些类型的屏幕也可以安装在位于前侧窗和后侧窗之间的侧立柱上,如图2a所示。
260.因此,尽管已经示出和描述了本发明的至少一个实施例,但很明显的是,在不脱离本发明的精神和范围的情况下,可以对其做出许多改变和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1