车辆的行驶控制方法及行驶控制装置与流程
1.本发明涉及车辆的行驶控制方法及行驶控制装置。
背景技术:
2.作为车辆的自动驾驶等所利用的行驶路径生成装置,已知有如下行驶路径生成装置,即,获取本车辆的周围信息和本车辆的行驶状态,根据基于周围信息获取的道路宽度、道路形状及障碍物等,识别本车辆的可行驶区域和不可行驶区域,在识别的可行驶区域中,基于本车辆的车速和目标横向加速度设定行驶路径的曲率,根据该曲率将支持向量机中用作核函数的矢径基底函数的系数设定为曲率参数(专利文献1)。而且,利用该行驶路径生成装置的支持向量机,基于设定的曲率参数生成车辆的行驶路径。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2015-16799号公报
6.发明所要解决的问题
7.在上述现有技术中,将分别属于道路的左右类别的特征点中最接近识别面的特征点设为支持向量,以支持向量与识别面的距离成为最大的方式生成识别面,并将其设为行驶路径。即,将识别为可行驶的道路的区域的左右宽度方向的大致中央设为行驶路径。因此,在例如仅在宽度较宽的道路左侧的路边分散有障碍物、例如停车车辆的情况下等,生成仅在不存在障碍物的范围返回到道路的中央这样的波动的行驶路径,有时给乘客造成不适感。
技术实现要素:
8.本发明所要解决的问题在于,提供消除乘客的不适感而能够实现顺畅的自动行驶控制的车辆的行驶控制方法及行驶控制装置。
9.用于解决问题的技术方案
10.本发明中,检测本车辆可行驶的道路区域的行驶路,相对于该行驶路空间,生成将左侧边界线的势(potential)值和右侧边界线的势值设定成相互不同的值的势场,应用势法运算行驶路宽度。在根据该运算的行驶路宽度确定的行驶路径的横向位置相对于以左侧边界线或右侧边界线为基准在行驶路内预先设定的行驶路径的横向位置存在差异的情况下,修正该部分的势值,再次生成设定成修正后的势值的势场,对其应用势法生成行驶路径,并按照生成的行驶路径执行车辆的自动行驶控制。由此,解决上述课题。
11.发明效果
12.根据本发明,按照预先设定的行驶路径的横向位置生成行驶路径,因此,能够消除乘客的不适感而实现顺畅的自动行驶控制。
附图说明
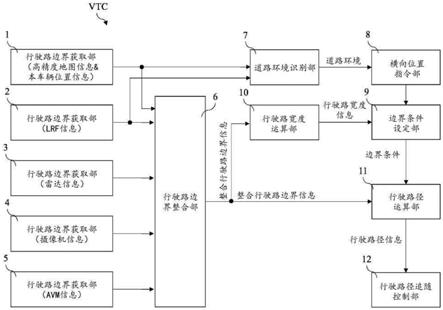
13.图1是表示本发明的车辆的行驶控制装置的一实施方式的块图。
14.图2是表示图1的行驶路宽度运算部的结构的块图。
15.图3是表示图1的行驶路径运算部的结构的块图。
16.图4是表示图1的车辆的行驶控制装置中执行的处理顺序的流程图。
17.图5是用于说明图4的步骤s1~s4的处理的行驶路的俯视图。
18.图6是表示用于说明图4的步骤s5~s6的处理的势场及等势线的图。
19.图7是表示用于说明图4的步骤s7的处理的、沿着图6的vii-vii线的截面的势值的图表。
20.图8是表示用于说明图4的步骤s8~s10的处理的一例的、沿着图6的vii-vii线的截面的势值的图表。
21.图9是表示用于说明图4的步骤s8~s10的处理的另一例的、沿着图6的vii-vii线的截面的势值的图表。
22.图10是表示存储于图1的横向位置指令部的控制映像的一例的图。
23.图11是表示用于说明图4的步骤s12的处理的势场及等势线的图。
24.图12是表示用于说明图4的步骤s13的处理的势场及等势线的图。
25.图13是表示成为使用本发明的车辆的行驶控制装置生成的行驶路径的前提的场景的一例的俯视图。
26.图14是用于说明使用本发明的车辆的行驶控制装置相对于图13的场景执行的处理的俯视图(其一)。
27.图15是用于说明使用本发明的车辆的行驶控制装置相对于图13的场景执行的处理的俯视图(其二)。
28.图16是用于说明使用本发明的车辆的行驶控制装置相对于图13的场景执行的处理的俯视图(其三)。
具体实施方式
29.图1是表示本实施方式的车辆的行驶控制装置vtc的结构的块图。本实施方式的车辆的行驶控制装置vtc也是实施本发明的车辆的行驶控制方法的一实施方式。如图1所示,本实施方式的车辆的行驶控制装置vtc具备:行驶路边界获取部1~5、行驶路边界整合部6、道路环境识别部7、横向位置指令部8、边界条件设定部9、行驶路宽度运算部10、行驶路径运算部11、行驶路径追随控制部12。
30.这些单元中,行驶路边界获取部1~5如后述由各种传感器类构成。另外,行驶路边界整合部6、道路环境识别部7、横向位置指令部8、边界条件设定部9、行驶路宽度运算部10、行驶路径运算部11、行驶路径追随控制部12利用一个或多个计算机及安装于该计算机的软件构成。计算机由储存有程序的rom、执行该rom所储存的程序的cpu、作为可访问的存储装置发挥作用的ram构成,该程序用于使行驶路边界整合部6、道路环境识别部7、横向位置指令部8、边界条件设定部9、行驶路宽度运算部10、行驶路径运算部11、及行驶路径追随控制部12之类的各单元发挥作用。此外,作为动作电路,能够代替cpu或与cpu一起使用mpu、dsp、asic、fpga等。
31.行驶路边界获取部1~5检测用于获取成为自动行驶控制的控制对象的本车辆v的行驶路ta的与左侧边界线相关的左侧行驶路边界信息和与右侧边界线相关的右侧行驶路边界信息的各种信息。
32.行驶路边界获取部1获取搭载于本车辆的本车辆位置检测器的本车辆位置信息和储存于地图数据库的三维高精度地图信息,并将这些信息输出至行驶路边界整合部6和道路环境识别部7。该本车辆位置检测器由gps单元、陀螺仪传感器、及车速传感器等构成,通过gps单元检测从多个卫星通信发送的电磁波,周期性地获取本车辆的位置信息,并且基于获取的本车辆的位置信息、从陀螺仪传感器获取的角度变化信息、从车速传感器获取的车速,检测本车辆的当前的位置信息。另外,储存于地图数据库的三维高精度地图信息是基于使用数据获取用车辆在实际的道路上行驶时检测的道路形状的三维地图信息,是道路的汇合地点、分支地点、收费站、车道数的减少位置、服务区/停车区域等详细且高精度的位置信息与地图信息一起作为三维信息相关联的地图信息。
33.行驶路边界获取部2利用设置于车辆前部的激光测距仪(lrf)获取障碍物信息(lrf信息),并将该信息输出至行驶路边界整合部6和道路环境识别部7。激光测距仪向车辆的前方区域照射作为距离测定用的输出波的激光,并检测其反射波(探测波),由此,生成表示车辆周围的物体目标(物体目标是例如在车辆行驶的行驶路的其它车辆、两轮车、自行车、行人、行驶路面上的车道区分线、路边的缘石、护栏、墙壁面、路堤等)与车辆之间的相对位置的测距信号。
34.行驶路边界获取部3利用使用了毫米波或超声波的雷达装置获取障碍物信息(雷达信息),并将该信息输出至行驶路边界整合部6。雷达装置向车辆前方照射毫米波或超声波,扫描本车辆周围的规定范围,而检测存在于本车辆周围的其它车辆、两轮车、自行车、行人、路边的缘石、护栏、墙壁面、路堤等等障碍物。例如,雷达装置将障碍物与本车辆的相对位置(方位)、障碍物的相对速度、从本车辆到障碍物的距离等作为本车辆的周围状况进行检测。
35.行驶路边界获取部4利用设置于车辆前方等的摄像机获取障碍物信息(摄像机信息),并将该信息输出至行驶路边界整合部6。摄像机是拍摄本车辆前方的规定范围而获取图像数据的图像传感器,例如由设置于车厢内的前窗户上部的ccd广角摄像机构成。摄像机可以是立体摄像机或全方位摄像机,也可以包含多个图像传感器。摄像机根据获取的图像数据,将存在于本车辆前方的道路及道路周边的结构物、道路标示、标识、其它车辆、两轮车、自行车、行人等作为本车辆的周围状况进行检测。
36.行驶路边界获取部5利用设置于车辆的前方、后方及侧方的整个周围的摄像机获取障碍物信息(全景式监控(注册商标)avm信息),并将该信息输出至行驶路边界整合部6。摄像机是拍摄本车辆的整个周围的范围而获取图像数据的图像传感器,例如由设置于车厢内的前窗户上部、左右的后视镜、后车箱盖等的ccd广角摄像机构成。摄像机根据获取的图像数据,将存在于本车辆的周围的道路及道路周边的结构物、道路标示、标识、其它车辆、两轮车、自行车、行人等作为本车辆的周围状况进行检测。
37.以上的行驶路边界获取部1~5不需要全部设置,只要至少设置行驶路边界获取部1、行驶路边界获取部2或行驶路边界获取部3的任一方、行驶路边界获取部4或行驶路边界获取部5的任一方即可。行驶路边界获取部1获取本车辆的当前位置信息和其附近的三维高
精度地图信息,因此,能够识别本车辆附近的障碍物以外的道路形状。另外,行驶路边界获取部2或行驶路边界获取部3使用雷达光等进行扫描,因此,能够识别较远的障碍物的有无。与之相对,行驶路边界获取部4或行驶路边界获取部5使用图像传感器等进行拍摄,因此,能够不仅识别障碍物的有无,还识别至其种类。
38.行驶路边界整合部6基于由这些行驶路边界获取部1~5获取的信息,生成本车辆可行驶的道路区域即行驶路的、与左侧边界线相关的左侧行驶路边界信息和与右侧边界线相关的右侧行驶路边界信息。即,根据由行驶路边界获取部1获取的本车辆的当前位置信息和定义了道路边界信息的地图信息,检测本车辆可行驶的道路区域的水平面内的第一行驶路边界信息。另外,与此同时,获取由行驶路边界获取部2~5获取的本车辆的周围的物体及道路状况作为周围信息,根据该周围信息检测本车辆可行驶的道路区域的水平面内的第二行驶路边界信息。
39.另外,本说明书中,“道路”是指无论障碍物的有无,现实中均存在且包含于地图信息的、为了车辆及人类通行而配备的道路本身。与之相对,本说明书中,“行驶路”是指道路中本车辆可行驶的区域即除了障碍物之外的本车辆可行驶的道路的区域。因此,行驶路边界整合部6检测由行驶路边界获取部1获取的与“道路”相关的第一行驶路边界信息,另一方面,检测由行驶路边界获取部2~5获取的与“行驶路”相关的第二行驶路边界信息。而且,行驶路边界整合部6对第一行驶路边界信息和第二行驶路边界信息进行整合,生成整合行驶路边界信息,进一步将该整合行驶路边界信息分离成左侧行驶路边界信息和右侧行驶路边界信息。此外,本说明书中“左侧”、“右侧”及“横向”是指将本车辆行进方向设为前方的情况的左侧、右侧及横向。
40.图13是表示本车辆v行驶的道路的一例的俯视图,在日本及英国那样的左侧通行的法律规定的国家中,表示左侧的一车道。在该场景的情况下,行驶路边界整合部6利用行驶路边界获取部1获取本车辆v的当前位置,具体而言利用gps单元获取维度、经度信息,并且根据三维高精度地图信息获取本车辆v存在的周围的道路信息、具体而言道路r的环境或属性(国家信息、道路左端rl的位置信息、道路右端rr的位置信息、道路r的宽度、高速公路/普通道路/其它的道路种类等)。与此同时,行驶路边界整合部6利用行驶路边界获取部2~5获取存在于本车辆v的周围的其它车辆、两轮车、自行车、行人、路边的缘石、护栏、墙壁面、路堤等等障碍物的位置信息。
41.而且,行驶路边界整合部6从根据由行驶路边界获取部1获取的本车辆v的当前位置信息及其周边的三维高精度地图信息而识别的道路r的区域,减去根据由行驶路边界获取部2~5获取的障碍物的位置信息而识别的障碍物的存在区域,运算本车辆v可行驶的行驶路ta。然后,行驶路边界整合部6根据这样运算的行驶路ta的区域信息,运算表示左侧边界线el的左侧行驶路边界信息和表示右侧边界线er的右侧行驶路边界信息。对图13所示的场景换句话说,利用行驶路边界获取部2~5获取到在道路r的左侧部存在3台静止障碍物(停车车辆)v1、v2、v3的情况,因此,左侧边界线el成为以虚线表示的线,另一方面,在道路r的右侧部不存在障碍物,因此,右侧边界线er成为与道路右端rr相同的线。此外,行驶路边界整合部6无论是图13所示的较简单的道路形状,还是图5所示的复杂的道路形状,均将左侧边界线el的左侧行驶路边界信息和右侧边界线er的右侧行驶路边界信息各自如图5所示转换成直线的折线信息的集合体而进行保有。
42.返回图1,道路环境识别部7根据由行驶路边界获取部1获取的本车辆v的当前位置信息及其周边的三维高精度地图信息及由行驶路边界获取部2获取的障碍物的位置信息,识别本车辆v当前行驶中的道路环境等。具体而言,如图10所示,识别作为道路环境是否为在道路r的左右任一方的侧部停车的停车车辆多的车道、汽车的行驶法规是左行驶还是右行驶的国家信息、及左侧边界线el的左侧行驶路边界信息的频率和右侧边界线er的右侧行驶路边界信息的频率。图10是表示图1的横向位置指令部8中所存储的控制映像的一例的图。
43.横向位置指令部8是根据道路环境,预先设定适于本车辆v行驶的行驶路ta的横向位置的单元。例如,在日本国中,乘用车的车宽为1.4~2.5m,与之相对,一个车道的道路r的宽度(幅宽)规定为3.5m左右。但是,包含日本国在内,根据国家不同,也存在5~6m水平的宽阔的道路,在这样的道路上,允许路边停车的情况也不少。因此,在本实施方式的横向位置指令部8中,对于作为道路环境是否为在路边停车的停车车辆多的车道,根据行驶路边界获取部1的三维高精度地图信息获取不是停车禁止,并且根据行驶路边界获取部2的lrf信息获取实际上是否存在停车车辆。另外,根据行驶路边界获取部1的三维高精度地图信息获取本车辆v的行驶中的国家信息,并识别是左侧行驶还是右侧行驶。进而,作为其它的条件,获取行驶路边界整合部6中获取的左侧边界线el的左侧行驶路边界信息的频率和右侧边界线er的右侧行驶路边界信息的频率,识别障碍物在左侧边界线el和右侧边界线er的哪一方多。此外,左侧行驶路边界信息的频率及右侧行驶路边界信息的频率,如果以图13所示的左侧边界线el而言,是指相对于道路r的延伸方向(图13的上下方向)的横向的锯齿线的频率。即是指将横向的变化设为振幅,且将沿着道路r的方向设为时间的情况的左侧边界线el及右侧边界线er的频率,是沿着道路r的方向上的每单位距离的横向变化的频率。在频率大的情况下,是指障碍物多,在频率小的情况下,是指障碍物少。
44.而且,横向位置指令部8根据由道路环境识别部7识别的道路环境、国家信息及其它的条件和横向位置指令部8中所存储的图10所示的控制映像,在作为道路环境为停车车辆在路边多的车道的情况下,根据国家信息识别为左侧行驶的国家时,以将从行驶路ta的右端起向左1.5m的位置设为本车辆v的车宽中心并自动行驶控制的方式输出指令,根据国家信息识别为右侧行驶的国家时,以将从行驶路ta的左端起向右1.5m的位置设为本车辆v的车宽中心并自动行驶控制的方式输出指令。同样地,横向位置指令部8在作为道路环境为停车车辆在路边多的车道的情况下,得不到国家信息时,获取行驶路边界整合部6中获取的左侧边界线el的左侧行驶路边界信息的频率和右侧边界线er的右侧行驶路边界信息的频率,在左侧行驶路边界信息的频率一方小时,以将从行驶路ta的左端起向右1.5m的位置设为本车辆v的车宽中心并自动行驶控制的方式输出指令,在右侧行驶路边界信息的频率一方小时,以将从行驶路ta的右端起向左1.5m的位置设为本车辆v的车宽中心并自动行驶控制的方式输出指令。此外,在作为道路环境不是停车车辆在路边多的车道的情况下,以自动行驶控制的方式输出指令,以使行驶路ta的中心位置与本车辆v的车宽中心一致。
45.再次返回图1,行驶路宽度运算部10获取由行驶路边界整合部6运算的整合行驶路边界信息(包含左侧行驶路边界信息及右侧行驶路边界信息),运算本车辆v的前方的行驶路ta的行驶路宽度w。图2是表示图1的行驶路宽度运算部10的具体的结构的块图,图5是表示由行驶路边界整合部6运算的整合行驶路边界信息(包含左侧行驶路边界信息及右侧行
驶路边界信息)的俯视图。
46.如图2所示,行驶路宽度运算部10具备势值运算部101、等势线运算部102、梯度运算部103,读入左侧边界线el的左侧行驶路边界信息和右侧边界线er的右侧行驶路边界信息各自,相对于本车辆v的行驶方向以规定间隔运算行驶路宽度w,并将其输出至边界条件设定部9。
47.图6是表示使用替代电荷法(也称为电荷重叠法),在行驶路ta的二维空间(x-y平面)内生成左侧行驶路边界信息的左侧边界线el成为第一势值(同图所示的例子中,+3v),且右侧行驶路边界信息的右侧边界线er成为与第一势值(+3v)不同的第二势值(同图所示的例子中,-3v)的势场,且运算势场的势值的结果的图。表示在以多个折线的集合体表示的左侧边界线el和以相同的多个折线的集合体表示的右侧边界线er之间存在行驶路ta的二维空间内,使用计算机模拟应用替代电荷法,对左侧边界线el施加+3v的电压,且对右侧边界线er施加-3v的电压的情况的电场的等电荷线(等势线)。即,图6表示形成于左侧边界线el与右侧边界线er之间的行驶路ta的二维空间内的、使用替代电荷法运算拉普拉斯方程式的解即势值的结果。
48.图7是表示图6的行驶路ta的一截面即沿着vii-vii线的截面的势值(电荷)的图表。图7的纵轴的势值“+p”相当于图6的+3v,图7的纵轴的势值“-p”相当于图6的-3v。而且,在图7中,通过本发明人等确认到从左侧边界线el到右侧边界线er的势值的梯度k大致一定,因此,当设为势值p、行驶路宽度w、梯度k时,根据图7的图表,kw=2p成立,能够根据行驶路宽度w=2p/k,运算行驶路宽度w。
49.在此,拉普拉斯方程式是求解自然界的稳定状态(不根据时间而变化的状态,即没有时间的变量的状态)的势场的微分方程式,例如除了图6所示那样的没有电荷分布的一样的介质中的静电势之外,还包含与接触于热源的固体内的温度分布相关的热传导的扩散方程式、求解重力场的重力势的方程式。具体而言,相对于本实施方式那样的行驶路ta的二维空间(x,y)的二次函数e,是指的方程式。
50.另外,在运算该拉普拉斯方程式的解时,能够使用可进行满足拉普拉斯方程式的二阶连续微分的函数(以下,调和函数)进行运算。即,相对于本实施方式那样的行驶路ta的二维空间(x,y)的二次函数e,e=ax+by+c,e=ain(√(x2+y2))成为调和函数(其中,a、b、c表示定数,in表示自然对数)。此外,调和函数假定可进行二阶连续微分的函数,但也可进行无限次微分。在此,在本实施方式那样的行驶路ta的二维空间(x,y)的情况下,存在满足的方程式的、成对的次调和函数e、f。使用该成对的函数e、f得到的复函数g(x,y)=e(x,y)+if(x,y)为满足拉普拉斯方程式的调和函数的一种,称为正则函数,具有便于运算的特征。
51.图2所示的势值运算部101对行驶路ta的二维空间(x-y平面)应用替代电荷法,求得与该电场相关的拉普拉斯方程式的解。具体而言,将由左侧行驶路边界信息及右侧行驶路边界信息各自的折线信息的线段的位置、方向及长度规定的调和函数设为基底函数,并使用它们的线性结合的近似解。在此,将折线信息各自的线段的中点选为狄利克雷边界条件的应用场所,应用替代电荷法而得到线性结合的系数。然后,更具体而言,将行驶路ta的二维空间(x-y平面)设为复平面,将行驶路边界信息转换成复数信息,将基底函数设为复
正则函数,使用作为这些线性结合的近似解的复势,由此,能够得到二维空间(x-y平面)的全部或一部分位置的电荷(势值)。此外,作为基底函数的复正则函数中,将z设为复数变量,并以f(z)=in(z1-z)+in{(z1-z)/(z0-z)}(z0-z)/(z1-z0)定义。这样,如果将成为势场的对象的行驶路ta设为复平面,并将左侧边界线el的左侧边界信息和右侧边界线er的右侧边界信息转换成复数信息,则容易求得梯度k,因此,梯度运算部103根据图7所示的行驶路宽度w=2p/k,运算行驶路宽度w,并输出至边界条件设定部9。
52.但是,当利用势值运算部101求得行驶路ta的x-y平面的所有的电荷(势值)时,运算负荷大,运算时间也长。因此,等势线运算部102通过探索成为电荷(势值)相等的基准的位置,得到等电荷线(等势线)。例如,图6所示的行驶路ta的例子中,将对左侧边界线el施加了+3v,且对右侧边界线er施加了-3v的电压的电场作为势场生成,因此,沿着本车辆v的行驶方向探索成为其中间值的0v的位置即行驶路ta的中心点。图11是用于说明这样的等势线的探索方法的俯视图。
53.等势线运算部102对于图11的左图中、位于本车辆v的行驶前方的行驶路ta,预设定要设为行驶路ta的中心线的起点的位置,使用牛顿法求得真正的行驶路ta的中心点。此外,牛顿法(均称为牛顿-拉夫逊法)是用于通过数值计算求解方程式系的反复法的求根算法,即如下算法,求得预设定的初始值x
n
的函数的切线与势p=0的截距,将其设定为x
n+1
,接着求得该值x
n+1
的函数的切线与势p=0的截距,将其设定为x
n+2
,重复进行该处理,由此,求得真正的行驶路ta的中心点的起点位置tr0。
54.等势线运算部102如果通过上述的牛顿法求得行驶路ta的中心线的真正的起点位置tr0,则如图11的右图所示,使用四次龙格-库塔法(rk4)求得相对于本车辆v的行驶方向向前方规定距离的位置tr1的行驶路ta的中心点。在此,四次龙格-库塔法(rk4)是初始值使用对已知的微分方程式进行了泰勒展开的4次项求解的数值解析法。例如,函数f(x,y)=dy/dx、初始值x0、y0时,向前方规定距离h的位置x0+h的y(x0+h)的四次泰勒展开式成为y(x0+h)=y0+hf(x0,y0)+hf(x0+h/2,y0+k1/2)+hf(x0+h/2,y0+k2/2)+hf(x0+h,y0+k3)。其中,k1=hf(x0,y0),k2=hf(x0+h/2,y0+k1/2),k3=hf(x0+h/2,y0+k2/2),k4=hf(x0+h,y0+k3),k=(k1+2k2+2k3+k4)/6。等势线运算部102以下重复进行该处理,如图11的右图所示,求得行驶路ta的前方的位置trn的行驶路ta的中心点。然后,等势线运算部102将这些中心点结合而制成行驶路ta的中心线cl,并输出至梯度运算部103。梯度运算部103保有上述运算的行驶路宽度w和行驶路ta的中心线cl的信息,并输出至边界条件设定部9。
55.返回图1,边界条件设定部9根据从行驶路宽度运算部10获取的行驶路宽度w及行驶路ta的中心线cl和从横向位置指令部8获取的横向位置,设定边界条件。图8及图9是表示沿着图6的vii-vii线的截面的势值的图表,是将包含从行驶路宽度运算部10获取的行驶路宽度w及行驶路ta的中心线cl的势值以实线表示,将相对于从横向位置指令部8获取的横向位置的势值以虚线表示的图表。
56.即,图8所示的场景例表示以实线表示的左侧边界线el的势值为+p,右侧边界线er的势值为-p,行驶路ta的中心线为cl,与之相对,来自横向位置指令部8的指令在从行驶路ta的中心线cl向左偏置x1(m)的位置的情况。在该情况下,如虚线所示,边界条件设定部9运算作为边界条件的左侧边界线el的势值p
1l
和右侧边界线er的势值-p
1r
,以使势值p成为0的位置成为从行驶路ta的中心线cl向左偏置x1的位置cla。具体而言,从以实线表示的行驶
路宽度运算部10的梯度运算部103获取梯度k,使用p
1l
=+p-kx1、p
1r
=-p-kx1的关系式,运算p
1l
及p
1r
。这些势值p
1l
及p
1r
作为边界条件,输出至后述的行驶路径运算部11的边界条件修正部111。
57.图9所示的场景例表示以实线表示的左侧边界线el的势值为+p,右侧边界线er的势值为-p,行驶路ta的中心线为cl,与之相对,来自横向位置指令部8的指令在从行驶路ta的右侧边界线er向左偏置x2(m)的位置的情况。在该情况下,如虚线所示,边界条件设定部9运算作为边界条件的左侧边界线el的势值p
1l
和右侧边界线er的势值-p
1r
,以使势值p成为0的位置成为从行驶路ta的右侧边界线向左偏置x2的位置cla。具体而言,从以实线表示的行驶路宽度运算部10的梯度运算部103获取梯度k,使用p
1l
=+p-(2p2/kx2)、p
1r
=-p的关系式,运算p
1l
及p
1r
。这些势值p
1l
及p
1r
作为边界条件,输出至后述的行驶路径运算部11的边界条件修正部111。
58.返回图1,行驶路径运算部11根据从行驶路边界整合部6获取的整合行驶路边界信息和从边界条件设定部9获取的边界条件,运算本车辆v的行驶路径tr,并将其输出至行驶路径追随控制部12。图3是表示图1的行驶路径运算部11的具体的结构的块图,图12是表示由行驶路径运算部11运算的行驶路径tr的俯视图。如图3所示,行驶路径运算部11具备边界条件修正部111、势值运算部112、等势线运算部113、梯度运算部114。
59.边界条件修正部111根据从行驶路边界整合部6获取的整合行驶路边界信息和从边界条件设定部9获取的边界条件,修正整合行驶路边界信息所含的左侧边界信息的左侧边界线el的势值和右侧边界信息的右侧边界线er的势值。如图8及图9所示,对在修正前的行驶路的中心线cl和从横向位置指令部8获取的横向位置(图8及图9中以虚线表示的修正后的行驶路的中心线cla)存在差的区间执行该势值的修正。即,对于由行驶路宽度运算部10和横向位置指令部8求得的、边界条件设定部9中设定的边界条件与行驶路宽度运算部10的势值运算部101中最初设定的势值不同的区间,修正该势值,对于其它的区间直接使用势值运算部101中最初设定的势值。
60.即,在本车辆v的前方的行驶路ta的某个区间中为图8所示那样的状况的情况下,对于该区间,将左侧边界线el的势值+p修正成p
1l
,将右侧边界线er的势值-p修正成-p
1r
。同样地,在本车辆v的前方的行驶路ta的某个区间中为图9所示那样的状况的情况下,对于该区间,将左侧边界线el的势值+p修正成p
1l
,右侧边界线er的势值-p不进行修正而直接设为-p。
61.势值运算部112除了修正左侧边界线el的势值和右侧边界信息的右侧边界线er的势值以外,执行与图2所示的行驶路宽度运算部10的势值运算部101相同的处理。即,势值运算部112相对于图5所示的行驶路ta的二维空间(x-y平面),将对于由边界条件修正部111修正的区间修正后的势值+p
1l
、-p
1r
、对于未修正的区间的最初的势值+p、-p分别设为左侧边界线el的势值及右侧边界线er的势值,使用替代电荷法(均称为电荷重叠法),在该行驶路ta的二维空间(x-y平面)内生成势场,并求得与该电场相关的拉普拉斯方程式的解。具体而言,将由左侧行驶路边界信息及右侧行驶路边界信息各自的折线信息的线段的位置、方向及长度规定的调和函数设为基底函数,使用它们的线性结合的近似解。在此,将折线信息各自的线段的中点选为狄利克雷边界条件的应用场所,应用替代电荷法得到线性结合的系数。而且,更具体而言,将行驶路ta的二维空间(x-y平面)设为复平面,将行驶路边
界信息转换成复数信息,将基底函数设为复正则函数,并使用作为它们的线性结合的近似解的复势,由此,能够得到二维空间(x-y平面)的全部或一部分位置的电荷(势值)。此外,作为基底函数的复正则函数将z设为复数变量,并以f(z)=in(z1-z)+in{(z1-z)/(z0-z)}(z0-z)/(z1-z0)定义。
62.等势线运算部113与图2所示的行驶路宽度运算部10的等势线运算部102一样,通过探索成为电荷(势值)相等的基准的位置,得到等电荷线(等势线)。例如,图6所示的行驶路ta的例子中,将对左侧边界线el施加了+3v或修正后的势值,对右侧边界线er施加了-3v或修正后的势值的电压的电场作为势场进行生成,因此,沿着本车辆v的行驶方向探索成为其中间值的0v的位置即行驶路ta的中心点。
63.即,等势线运算部113对于图11的左图中、处于本车辆v的行驶前方的行驶路ta,预设定要成为行驶路ta的中心线的起点的位置,使用牛顿法求得真正的行驶路ta的中心点。等势线运算部113如果通过上述的牛顿法,求得行驶路ta的中心线的真正的起点位置tr0,则如图11的右图所示,使用四次龙格-库塔法(rk4)求得相对于本车辆v的行驶方向向前方规定距离的位置tr1的行驶路ta的中心点。然后,等势线运算部113以下重复进行该处理,如图11的右图所示求得行驶路ta的前方的位置trn的行驶路ta的中心点。然后,如图12所示,等势线运算部113将这些中心点结合,将行驶路ta的中心线cl设为行驶路径tr,并输出至梯度运算部114。梯度运算部114保有上述运算的行驶路宽度w和行驶路径tr的信息,并输出至行驶路径追随控制部12。
64.此外,等势线运算部113对于由边界条件修正部111修正了左侧边界线el和/或右侧边界线er的势值的区间,求得行驶路ta的前方的位置trn的行驶路ta的中心点。这是由于,如图8及图9所示,使用修正后的左侧边界线el和/或右侧边界线er的势值得到的拉普拉斯方程式的解与修正后的行驶路的中心线cla对应。
65.行驶路径追随控制部12将从行驶路径运算部11获取的本车辆v的行驶路径tr设为目标路径,控制包含执行本车辆v的转向控制的转向促动器的转向装置、包含执行本车辆v的加速或减速控制的加速促动器(或燃料喷射或驱动源电机的电流)的加减速驱动装置、及包含执行本车辆v的制动控制的制动促动器的制动装置。
66.接着,参照图4的流程图说明本实施方式的车辆的行驶控制装置vtc的控制顺序。图4是表示图1的车辆的行驶控制装置vtc中执行的处理顺序的流程图。如图5、图6、图11及图12所示,上述的本实施方式的车辆的行驶控制装置vtc的结构基于普通的道路进行了说明,但在以下的控制顺序中,为了容易理解本实施方式的作用效果,对本车辆v在图13所示的简单的道路r行驶的场景进行说明。就图13所示的道路r而言,在日本及英国那样的左侧通行的法律规定的国家中,表示左侧的一个车道。另外,该道路r是比作为普通的道路宽度的3.5m宽,例如为5~6m水平的宽阔的道路r,允许路边停车。
67.首先,在图4的步骤s1中,根据由行驶路边界获取部1获取的本车辆v的当前位置信息和定义道路边界信息的地图信息,检测本车辆v可行驶的道路区域的水平面内的第一行驶路边界信息。另外,与此同时,在步骤s2中,获取由行驶路边界获取部2~5获取的本车辆v的周围的物体及道路状况作为周围信息,根据该周围信息检测本车辆v可行驶的道路区域的水平面内的第二行驶路边界信息。根据第一行驶路边界信息,能够识别本车辆v附近的障碍物以外的道路形状,根据第二行驶路边界信息,能够识别本车辆v的周围的远近双方的障
碍物的有无及种类。
68.在步骤s3中,行驶路边界整合部6对由行驶路边界获取部1~5获取的第一行驶路边界信息及第二行驶路边界信息进行整合,生成整合行驶路边界信息。即,相对于图13所示的场景,行驶路边界整合部6从根据由行驶路边界获取部1获取的本车辆v的当前位置信息及其周边的三维高精度地图信息而识别的道路r的区域,减去根据由行驶路边界获取部2~5获取的障碍物v1、v2、v3的位置信息识别的障碍物v1、v2、v3的存在区域,运算本车辆v可行驶的行驶路ta。
69.进而,在步骤s4中,行驶路边界整合部6将整合行驶路边界信息分离成本车辆v可行驶的道路区域即行驶路的、与左侧边界线el相关的左侧行驶路边界信息和与右侧边界线er相关的右侧行驶路边界信息。如果对图13所示的场景进行说明,则利用行驶路边界获取部2~5获取到在道路r的左侧部存在3台静止障碍物(停车车辆)v1、v2、v3的情况,因此,左侧边界线el成为以虚线表示的线,另一方面,在道路r的右侧部不存在障碍物,因此,右侧边界线er成为与道路右端rr相同的线。在图14的左图表示分离的与左侧边界线el相关的左侧行驶路边界信息和与右侧边界线er相关的右侧行驶路边界信息。
70.如背景技术的栏中进行的叙述,当根据图14的左图所示的左侧边界线el、右侧边界线er及由它们界定的行驶路ta,利用支持向量机基于设定的曲率参数生成车辆的行驶路径时,如图14的右图所示,在不存在作为障碍物的停车车辆的区间较长的情况下,行驶路径tr成为在该部分波动的路径,会给乘客造成不适感。特别是图13所示那样的5~6m水平的宽阔的道路r,在允许路边停车的道路r中,与沿着行驶路ta的中心行驶相比,倒是以道路右端rr为基准进行行驶的一方不管路边停车的有无,均能够生成顺畅的行驶路径。
71.于是,本实施方式的车辆的行驶控制装置vtc在步骤s5~s13中,对于图14的左图所示的当前的行驶路ta,不管在左侧的路边是否存在停车车辆v1、v2、v3,均使用拉普拉斯方程式的解运算从右侧边界线er向左偏置x2(m)的位置,以成为本车辆v的行驶路径tr。
72.即,在步骤s5中,行驶路宽度运算部10的势值运算部101对于图15的左图所示的、步骤s4中求得的左侧边界线el、右侧边界线er及由它们界定的行驶路ta,使用替代电荷法,在行驶路ta的二维空间(x-y平面)内生成左侧边界线el成为第一势值(例如+3v)、右侧边界线er成为第二势值(例如-3v)的势场。接着,在步骤s6中,等势线运算部102通过探索成为电荷(势值)相等的基准的位置,得到等电荷线(等势线)。而且,在步骤s7中,梯度运算部103根据势场的解求得梯度k后,根据图7所示的行驶路宽度w=2p/k运算行驶路宽度w,并输出至边界条件设定部9。此外,如图15的右图所示,对于本车辆v的前方的行驶路ta以规定距离间隔运算该行驶路宽度w。另外,梯度运算部103保有运算的行驶路宽度w和行驶路ta的中心线cl的信息,并输出至边界条件设定部9。
73.在步骤s8中,道路环境识别部7、横向位置指令部8、及边界条件设定部9比较横向位置。即,横向位置指令部8根据从道路环境识别部7获取的道路环境和国家信息,如图10所示,检测本车辆v的行驶中的道路r为停车车辆多的车道且为左侧行驶的国家,因此,作为横向位置的指令内容,提取将“距行驶路右端为x2(例如1.5m)”的位置设为行驶路径tr的中心线的指令。然后,在步骤s9中,如图9所示,边界条件设定部9将从行驶路宽度运算部10获取的行驶路宽度w的行驶路ta的中心线cl的位置与横向位置指令部8中提取的“距行驶路右端为x2(例如1.5m)”的位置比较并判断是否具有差。此外,在该判断时,未必需要差为0,也可
以允许不会对乘客造成不适感程度的差的存在。另外,该差的有无的判断按照获取到图15的右图所示的行驶路宽度w的每个规定距离间隔执行。
74.在步骤s9中,在判断为具有差的情况下进入步骤s10,在判断为没有差的情况下进入步骤s11。在判断为具有差的步骤s10中,如图9所示,从行驶路宽度运算部10获取的行驶路宽度w的行驶路ta的中心线cl的位置与横向位置指令部8中提取的“距行驶路右端为x2(例如1.5m)”的位置相比具有差,因此,如图9中由虚线所示,边界条件设定部9运算作为边界条件的左侧边界线el的势值p
1l
和右侧边界线er的势值-p
1r
,以使势值p成为0的位置成为从行驶路ta的右侧边界线向左偏置x2的位置cla。具体而言,从以实线表示的行驶路宽度运算部10的梯度运算部103获取梯度k,使用p
1l
=+p-(2p2/kx2)、p
1r
=-p的关系式,运算p
1l
及p
1r
。这些势值p
1l
及p
1r
作为边界条件,输出至行驶路径运算部11的边界条件修正部111。边界条件修正部111修正从边界条件设定部9获取的左侧边界信息的左侧边界线el的势值和右侧边界信息的右侧边界线er的势值。在图16的左图中表示在本车辆v的前方的行驶路ta中修正势值的范围。在本例的情况下,如图9所示,将最初的势值+p修正成比其大的势值+p
1l
。
75.在步骤s11中,行驶路径运算部11将图16所示的修正后的势值(对于未修正的区间为最初的势值)设定成左侧边界线el和右侧边界线er,使用替代电荷法,在行驶路ta的二维空间(x-y平面)内生成势场。接着,在步骤s12中,等势线运算部113通过使用上述的牛顿法及四次龙格-库塔法探索成为电荷(势值)相等的基准的位置(本例中,势值成为0v的位置),而得到等电荷线(等势线)。该等势线成为图16的右图所示的本车辆v的行驶路径ta,因此,在步骤s13中将该等势线作为行驶路径ta输出至行驶路径追随控制部12。在步骤s12中,行驶路径追随控制部12沿着获取的行驶路径ta的位置信息,自动控制本车辆的转向装置、加减速驱动装置及制动装置,由此,执行自动行驶控制。
76.在上述的实施方式中,将左侧边界线el的势值设定成+p(例如+3v的电压),右侧边界线er的势值设定成-p(例如-3v的电压),通过替代电荷法求得与行驶路ta的势值相关的拉普拉斯方程式的解,并将势值成为0的位置设为行驶路径tr,但这些+p、-p、0仅为示例,不限定本发明。在本发明的车辆的行驶控制方法及控制装置中,至少将左侧边界线el的势值和右侧边界线er的势值设定成不同的值,生成势场,求得作为拉普拉斯方程式的解的势值。因此,例如将左侧边界线el的势值设定成+2p(例如+6v的电压),将右侧边界线er的势值设定成-p(例如-3v的电压),通过替代电荷法求得与行驶路ta的势值相关的拉普拉斯方程式的解,即使将势值成为+3的位置设为行驶路径tr,也得到同样的结果。另外,势场的解法不是仅限定于相对于电场的替代电荷法的宗旨,也可以是上述那样与接触于热源的固体内的温度分布相关的热传导的扩散方程式或求解重力场的重力势的方程式。
77.如上所述,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,比较预先设定的行驶路径的横向位置和由运算的行驶路宽度确定的行驶路径的横向位置,并运算其差,以运算的差的绝对值成为规定值以下的方式修正上述第一势值和/或上述第二势值,根据修正后的势值产生的势场的等势线,生成本车辆行驶的行驶路径,因此,不管障碍物的有无,均能够通过低负荷运算生成沿着预先设定的行驶路径的横向位置的行驶路径。由此,能够消除乘客的不适感而实现顺畅的自动行驶控制。
78.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,在获取
左侧行驶路边界信息和右侧行驶路边界信息时,根据本车辆的当前位置信息和定义了道路边界信息的地图信息,检测本车辆可行驶的道路区域的水平面内的第一行驶路边界信息,获取本车辆的周围的物体及道路状况作为周围信息,根据该周围信息检测本车辆可行驶的道路区域的水平面内的第二行驶路边界信息,对上述第一行驶路边界信息和上述第二行驶路边界信息进行整合,生成整合行驶路边界信息,并将上述整合行驶路边界信息分离成左侧行驶路边界信息和右侧行驶路边界信息。因此,根据第一行驶路边界信息,能够识别本车辆v附近的障碍物以外的道路形状,根据第二行驶路边界信息,能够识别本车辆v的周围的远近双方的障碍物的有无及种类。其结果,能够获取以较高的精度包含静态的信息和动态的信息双方的左侧行驶路边界信息和右侧行驶路边界信息。
79.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,预先设定的行驶路径的横向位置为上述行驶路的横向的中心位置、从上述行驶路的右端向左方向的第一规定距离的位置、或从上述行驶路的左端向右方向的第二规定距离的位置的任一位置。因此,在为行驶路的横向的中心位置的情况下,能够生成乘客的安心感更高的行驶路径。另一方面,在为从行驶路的右端向左方向的第一规定距离的位置或从行驶路的左端向右方向的第二规定距离的位置的情况下,能够生成与道路环境对应的行驶路径。
80.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,预先存储与本车辆行驶的道路环境信息相关联的行驶路径的横向位置,获取本车辆行驶的道路环境信息,从存储的横向位置提取与该道路环境信息相关联的行驶路径的横向位置。因此,不会增加运算负荷,能够生成与道路环境对应的行驶路径。
81.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,分别运算上述左侧行驶路边界信息及上述右侧行驶路边界信息的行驶方向的频率,以上述左侧行驶路边界信息及上述右侧行驶路边界信息中频率小的一方的行驶路边界信息为基准,提取上述行驶路径的横向位置。因此,能够更进一步消除乘客的不适感而实现顺畅的自动行驶控制。
82.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,势场的势值使用拉普拉斯方程式的近似解,因此,能够抑制波动的行驶路径的生成,更进一步消除乘客的不适感而实现顺畅的自动行驶控制。
83.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,就势场的势值而言,将上述左侧行驶路边界信息及上述右侧行驶路边界信息分别转换成折线信息,将由上述折线信息各自的线段的位置、方向及长度规定的调和函数设为基底函数,并使用它们的线性结合的近似解。因此,能够以低运算负荷得到近似解。
84.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,就势场的势值而言,将成为对象的水平面设为复平面并将行驶路边界信息转换成复数信息,将基底函数设为复正则函数,使用作为它们的线性结合的近似解的复势。因此,能够以低运算负荷求得势值的梯度。
85.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,在将z设为复数变量时,将上述基底函数设为f(z)=in(z1-z)+in{(z1-z)/(z0-z)}(z0-z)/(z1-z0)。因此,仅采用实部,可得到连续的势值,因此,计算能够高速化,且在左右的行驶路边界线平行的情况下,能够将计算误差设为0。
86.另外,根据本实施方式的车辆的行驶控制装置vtc及车辆的行驶控制方法,将折线信息各自的线段的中点选为狄利克雷边界条件的应用场所,应用替代电荷法得到上述线性结合的系数,因此,能够以低运算负荷且得到误差小的运算结果。
87.符号说明
88.vtc:车辆的行驶控制装置
89.1:行驶路边界获取部(高精度地图信息)
90.2:行驶路边界获取部(lrf信息)
91.3:行驶路边界获取部(雷达信息)
92.4:行驶路边界获取部(摄像机信息)
93.5:行驶路边界获取部(avm信息)
94.6:行驶路边界整合部
95.7:道路环境识别部
96.8:横向位置指令部
97.9:边界条件设定部
98.10:行驶路宽度运算部
99.101:势值运算部
100.102:等势线运算部
101.103:梯度运算部
102.11:行驶路径运算部
103.111:边界条件修正部
104.112:势值运算部
105.113:等势线运算部
106.114:梯度运算部
107.12:行驶路径追随控制部
108.v:本车辆
109.r:道路
110.ta:行驶路
111.tr:行驶路径
112.el:左侧边界线
113.er:右侧边界线
114.p:势值
115.pf:势场
116.w:行驶路宽度
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1