基于换电设备的换电控制方法、系统、介质及电子设备与流程
1.本发明涉及电动汽车的换电技术领域,具体涉及一种基于换电设备的换电控制方法、系统、介质及电子设备。
背景技术:
2.电动汽车以电代油,能够实现零排放与低噪声,是解决能源和环境问题的重要手段。随着石油资源的紧张和电池技术的发展,电动汽车在性能和经济性方面已经接近甚至优于传统燃油汽车,并开始在世界范围内逐渐推广应用。以电动汽车为代表的新一代节能与环保汽车是汽车工业发展的必然趋势。作为电动汽车大规模推广应用的重要前提和基础,电动汽车充换电技术的发展和电动汽车充换电设施建设引起了各方广泛关注。
3.通常利用换电设备(例如换电小车)来取放电动汽车中的电池包,在向电动汽车的电池箱中放入电池包的过程中,需要保证电池包的上到位(即被举升到电动车的底盘位置)和前到位(即被推移到可以锁止电池包的位置)。
4.现有技术中,一般需要在电动汽车侧和换电设备侧都设置次级模块,并且在电动汽车侧设置上到位检测传感器和前到位检测传感器,利用电动汽车侧设置上到位检测传感器和前到位检测传感器分别检测的信号来指引换电设备对电池包的举升和推动操作,以使得电池包能够被准确锁止或解锁。但是,电动汽车侧的上到位检测传感器和前到位检测传感器检测的信号通过次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率,而且次级模块的成本较高,不利于换电流程的成本优化。
技术实现要素:
5.本发明要解决的技术问题是为了克服现有技术中换电设备与电动汽车之间在信号交互时需要次级模块,换电成本较高,且需要利用电动汽车侧的上到位检测传感器和前到位检测传感器检测的信号指引换电设备对电池包位置进行调整,准确性较差、换电效率低的缺陷,提供一种基于换电设备的换电控制方法、系统、介质及电子设备。
6.本发明是通过下述技术方案来解决上述技术问题:
7.一种基于换电设备的换电控制方法,所述换电设备用于对电动汽车上的电池包进行更换,所述电动汽车上设有锁止机构,所述锁止机构用于锁止固定所述电池包,所述锁止机构包括固定部和活动部,所述固定部内具有供电池包锁轴移动到锁止位置的锁槽,所述活动部相对所述固定部在锁止状态和解锁状态之间切换,以关闭或打开所述锁轴进出所述锁槽的开口,所述换电控制方法包括:
8.控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度;
9.控制所述换电设备将所述电池包的锁轴沿所述锁槽向所述锁止位置移动;
10.采集所述活动部相对所述固定部在所述电池包的锁轴沿所述锁槽移动过程中的第一实时图像;
11.根据所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像判断
所述锁止机构是否锁止完成,并执行相应动作。
12.该技术方案不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
13.较佳地,所述根据所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像判断所述锁止机构是否锁止完成,并执行相应动作的步骤包括:
14.判断所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像是否在预设误差范围内;
15.若是,则停止所述换电设备向所述锁槽内的所述锁止位置移动所述电池包。
16.该技术方案通过第一实时图像与第一标准图像来判断锁止是否完成,判断标准直观明了,而且可以通过判断结果对锁止情况进行实时调整,提高了换电流程的准确性。
17.较佳地,所述控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度的步骤包括:
18.采集所述换电设备距离基准面的第一实时高度,所述基准面为所述换电设备的行驶平面或所述电动汽车的停靠平面;
19.判断所述第一实时高度是否落入第一预设高度范围内;
20.若否,则根据所述第一实时高度与所述第一预设高度的第一高度差值控制所述换电设备的举升高度,直至所述换电设备举升电池包到达所述电动汽车底部的所述第一预设高度。
21.该技术方案通过实时高度与预设高度的对比来共同完成电池包的举高,提高了举升电池包的准确性。
22.较佳地,所述控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度的步骤之后还包括:
23.触发第一换电信号,并等待第一预设时间后控制所述换电设备将所述电池包的锁轴沿所述锁槽向所述锁止位置移动。
24.该技术方案提高了换电过程的安全性。
25.较佳地,所述触发第一换电信号的步骤包括:
26.检测所述换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第一换电信号,所述第一换电信号用于控制所述电动汽车的点火开关切换至关闭状态。
27.该技术方案提供了触发第一换电信号的具体优选方式,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
28.较佳地,所述控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度的步骤之前还包括:
29.触发第二换电信号,并等待第二预设时间。
30.该技术方案提高了换电过程的安全性。
31.较佳地,所述触发第二换电信号的步骤包括:
32.接收所述电动汽车发送的车辆状态信息,所述车辆状态信息包括车牌信息和钥匙信号,所述车牌信息与所述钥匙信号一一对应;
33.解析所述钥匙信号;
34.若所述钥匙信号表明所述电动汽车处于未熄火状态,则生成所述车牌信息对应的第二换电信号,所述第二换电信号用于控制所述车牌信息对应的所述电动汽车的点火开关切换至关闭状态。
35.该技术方案提供了触发第二换电信号的具体优选方式,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
36.较佳地,所述活动部包括锁舌;
37.所述采集所述活动部相对所述固定部在所述电池包的锁轴沿所述锁槽移动过程中的第一实时图像的步骤包括:采集在所述电池包的锁轴沿所述锁槽移动过程中的所述锁舌相对所述固定部的第一端部实时图像;
38.所述根据所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像判断所述锁止机构是否锁止完成,并执行相应动作的步骤包括:根据所述第一端部实时图像与所述锁舌位于所述锁止位置时的第一标准图像判断所述锁止机构是否锁止完成,根据判断结果调整所述电池包的移动距离。
39.该技术方案具体通过锁舌的实时状态来判断锁止机构是否锁止完成,判断结果直观、准确。
40.较佳地,所述活动部包括锁止杆和锁舌,所述锁止杆带动锁舌转动以打开或关闭所述锁槽的开口;
41.所述采集所述活动部相对所述固定部在所述电池包的锁轴沿所述锁槽移动过程中的第一实时图像的步骤包括:采集在所述电池包的锁轴沿所述锁槽移动过程中的所述锁止杆突出所述固定部侧壁的第二端部实时图像;
42.所述根据所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像判断所述锁止机构是否锁止完成,并执行相应动作的步骤包括:根据所述第二端部实时图像与所述锁止杆在锁止状态时的第一标准图像判断所述锁止机构是否锁止完成,根据判断结果调整所述电池包的移动距离。
43.该技术方案具体通过锁舌和锁止杆共同配合来完成锁止,并可以根据锁止杆的实时状态来判断锁止机构是否锁止完成,进一步提高了锁止状态判断的准确性。
44.较佳地,所述根据所述第二端部实时图像与所述锁止杆在锁止状态时的第一标准图像判断所述锁止机构是否锁止完成,根据判断结果调整所述电池包的移动距离的步骤包括:
45.根据所述锁止杆突出所述固定部侧壁的第二端部实时图像获取所述锁止杆的端部距离预设基准线的距离差值,并根据所述距离差值平移所述电池包的锁轴。
46.该技术方案中,通过锁止杆的端部距离预设基准线的距离差值来平移电池包,依据标准简单,简化了计算难度。
47.较佳地,所述电池包的锁轴上设有第一待测单元,所述电动汽车的电池托架上设有第一落锁检测传感器;所述换电控制方法还包括:判断所述第一落锁检测传感器是否检测到所述第一待测单元,若是,则确定所述电池包的锁轴移动到所述锁止位置;
48.和/或,
49.所述活动部包括锁舌,所述锁舌上设有第二待测单元,所述电动汽车的电池托架上设有第二落锁检测传感器;所述换电控制方法还包括:判断所述第二落锁检测传感器是
否检测到所述第二待测单元,若是,则确定所述电池包的锁轴移动到所述锁止位置;
50.和/或,
51.所述活动部包括锁止杆,所述锁止杆上设有第三待测单元,所述电动汽车的电池托架上设有第三落锁检测传感器;所述换电控制方法还包括:判断所述第三落锁检测传感器是否检测到所述第三待测单元,若是,则确定所述电池包的锁轴移动到所述锁止位置。
52.该技术方案通过多个落锁检测传感器对锁止结果进行进一步确认,保证了换电过程高效、准确的完成。
53.较佳地,所述第一预设高度包括第一举升高度和第二举升高度,所述换电设备在所述第一举升高度内的举升速度大于所述换电设备在所述第二举升高度内的举升速度;其中,在所述第一举升高度时,所述换电设备的导向叉刚进入电池托架内,在所述第二举升高度时,所述电池包的锁轴进入所述固定部,并且所述锁轴将所述活动部顶起,以打开所述锁轴进入锁槽的开口。
54.该技术方案通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证电池包的锁轴不受损坏,提高了安全性。
55.较佳地,所述控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度之前还包括:
56.控制所述换电设备将所述电池包的锁轴移动到第一预设坐标,以使所述电池包的锁轴与所述锁止机构对位;
57.或者,
58.通过视觉传感器实时采集所述锁止机构的第一实时对位图像,并根据所述第一实时对位图像调整所述锁轴的位置,以使所述电池包的锁轴与所述锁止机构对位。
59.该技术方案在利用换电设备举升电池包之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的电池包碰撞或刮蹭的风险。
60.较佳地,所述换电控制方法还包括:
61.当所述电池包到达所述锁止位置后,控制所述换电设备下降。
62.该技术方案可以及时结束换电,方便电动汽车尽快启动开走,以方便为其他电动汽车继续换电。
63.较佳地,所述换电控制方法还包括:
64.当所述电池包到达所述锁止位置后,控制所述电池包的锁轴向所述锁槽开口方向回退预设距离,以使所述锁轴抵靠所述活动部。
65.该技术方案可以提高电池包锁止的牢固性,防止电池包在为电动汽车供电时发生滑移造成接触不良,提高了用户体验。
66.一种基于换电设备的换电控制方法,所述换电设备用于对电动汽车上的电池包进行更换,所述电动汽车上设有锁止机构,所述锁止机构用于锁止固定所述电池包,所述锁止机构包括固定部和活动部,所述固定部内具有供电池包锁轴移动到锁止位置的锁槽,所述活动部相对所述固定部在锁止状态和解锁状态之间切换,以关闭或打开所述锁轴进出所述锁槽的开口,所述换电控制方法包括:
67.控制所述换电设备举升到电动汽车底部的第二预设高度;
68.控制所述换电设备将所述电池包的锁轴沿所述锁槽向解锁预紧位置移动,使所述
活动部相对所述固定部从锁止状态移动到解锁状态;
69.采集所述活动部相对所述固定部在所述活动部向解锁状态移动过程中的第二实时图像;
70.根据所述第二实时图像与所述活动部位于解锁状态时的第二标准图像判断所述锁止机构是否解锁完成,并执行相应动作。
71.该技术方案不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
72.较佳地,所述根据所述第二实时图像与所述活动部位于解锁状态时的第二标准图像判断所述锁止机构是否解锁完成,并执行相应动作的步骤包括:
73.判断所述第二实时图像与所述活动部位于解锁状态时的第二标准图像是否在预设误差范围内;
74.若否,则控制所述换电设备将所述电池包的锁轴沿所述锁槽向解锁预紧位置移动。
75.该技术方案通过第二实时图像与第二标准图像来判断解锁是否完成,判断标准直观明了,而且可以通过判断结果对解锁情况进行实时调整,提高了换电流程的准确性。
76.较佳地,所述控制所述换电设备举升到电动汽车底部的第二预设高度的步骤包括:
77.采集所述换电设备距离基准面的第二实时高度,所述基准面为所述换电设备的行驶平面或所述电动汽车的停靠平面;
78.判断所述第二实时高度是否落入第二预设高度范围内;
79.若否,则根据所述第二实时高度与第二预设高度的第二高度差值控制所述换电设备的举升高度,直至所述换电设备到达所述电动汽车底部的第二预设高度。
80.该技术方案通过实时高度与预设高度的对比来共同完成换电设备的举高,提高了举升准确性。
81.较佳地,所述控制所述换电设备举升到电动汽车底部的第二预设高度的步骤之后还包括:
82.触发第三换电信号,并等待第三预设时间后控制所述换电设备将所述电池包的锁轴沿所述锁槽向解锁预紧位置移动。
83.该技术方案提高了换电过程的安全性。
84.较佳地,所述触发第三换电信号的步骤包括:
85.检测所述换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第三换电信号,所述第三换电信号用于控制所述电动汽车的点火开关切换至关闭状态。
86.该技术方案提供了触发第三换电信号的具体优选方式,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
87.较佳地,所述控制所述换电设备举升到电动汽车底部的第二预设高度的步骤之前还包括:
88.触发第四换电信号,并等待第四预设时间。
89.该技术方案提高了换电过程的安全性。
90.较佳地,所述触发第四换电信号的步骤包括:
91.接收所述电动汽车发送的车辆状态信息,所述车辆状态信息包括车牌信息和钥匙信号,所述车牌信息与所述钥匙信号一一对应;
92.解析所述钥匙信号;
93.若所述钥匙信号表明所述电动汽车处于未熄火状态,则生成所述车牌信息对应的第四换电信号,所述第四换电信号用于控制所述车牌信息对应的所述电动汽车的点火开关切换至关闭状态。
94.该技术方案提供了触发第四换电信号的具体优选方式,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
95.较佳地,所述活动部包括锁舌;
96.所述采集所述活动部相对所述固定部在所述活动部向解锁状态移动过程中的第二实时图像的步骤包括:采集所述锁舌相对所述固定部的第三端部实时图像;
97.所述根据所述第二实时图像与所述活动部位于解锁状态时的第二标准图像判断所述锁止机构是否解锁完成,并执行相应动作的步骤包括:根据所述第三端部实时图像与所述锁舌位于解锁预紧位置时的第二标准图像判断所述锁止机构是否解锁完成,根据判断结果调整所述电池包的移动距离。
98.该技术方案具体通过锁舌的实时状态来判断锁止机构是否解锁完成,判断结果直观、准确。
99.较佳地,所述活动部包括锁止杆和锁舌,所述锁止杆带动锁舌转动以打开或关闭所述锁槽的开口;
100.所述采集所述活动部相对所述固定部在所述电池包的锁轴沿所述锁槽移动过程中的第二实时图像的步骤包括:采集在所述电池包的锁轴沿所述锁槽移动过程中的所述锁止杆突出所述固定部侧壁的第四端部实时图像;
101.所述根据所述第二实时图像与所述活动部位于解锁预紧位置时的第二标准图像判断所述锁止机构是否解锁完成,并执行相应动作的步骤包括:根据所述第四端部实时图像与所述锁止杆在解锁状态时的第二标准图像判断所述锁止机构是否解锁完成,根据判断结果调整所述电池包的移动距离。
102.该技术方案具体通过锁舌和锁止杆共同配合来完成解锁,并可以根据锁止杆的实时状态来判断锁止机构是否解锁完成,进一步提高了解锁状态判断的准确性。
103.较佳地,所述根据所述第四端部实时图像与所述锁止杆在完全解锁状态时的第二标准图像比对,根据判断结果调整所述电池包的移动距离的步骤包括:
104.根据所述锁止杆突出所述固定部侧壁的第四端部实时图像获取所述锁止杆的端部距离预设基准线的距离差值,并根据所述距离差值平移所述电池包的锁轴。
105.该技术方案中,通过锁止杆的端部距离预设基准线的距离差值来平移电池包,依据标准简单,简化了计算难度。
106.较佳地,所述电池包的锁轴上设有第四待测单元,所述电动汽车的电池托架上设有第一解锁检测传感器;所述换电控制方法还包括:判断所述第一解锁检测传感器是否检测到所述第四待测单元,若是,则确定所述电池包的锁轴移动到所述解锁预紧位置;
107.和/或,
108.所述活动部包括锁舌,所述锁舌上设有第五待测单元,所述电动汽车的电池托架上设有第二解锁检测传感器;所述换电控制方法还包括:判断所述第二解锁检测传感器是否检测到所述第五待测单元,若是,则确定所述电池包的锁轴移动到所述解锁预紧位置;
109.和/或,
110.所述活动部包括锁止杆,所述锁止杆上设有第六待测单元,所述电动汽车的电池托架上设有第三解锁检测传感器;所述换电控制方法还包括:判断所述第三解锁检测传感器是否检测到所述第六待测单元,若是,则确定所述电池包的锁轴移动到所述解锁预紧位置。
111.该技术方案通过多个解锁检测传感器对解锁结果进行进一步确认,保证了换电过程高效、准确的完成。
112.较佳地,所述第二预设高度包括第三举升高度和第四举升高度,所述换电设备在所述第三举升高度内的举升速度大于所述换电设备在所述第四举升高度内的举升速度;其中,在所述第三举升高度时,所述换电设备的导向叉刚进入电池托架内,在所述第四举升高度时,所述换电设备接触到待解锁的所述电池包。
113.该技术方案通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证换电设备的导向叉不受损坏,提高了安全性。
114.较佳地,所述控制所述换电设备举升到电动汽车底部的第二预设高度之前还包括:
115.控制所述换电设备移动到第二预设坐标,以使所述换电设备与待解锁的所述电池包对位;
116.或者,
117.通过视觉传感器实时采集所述换电设备的第二实时对位图像,并根据所述第二实时对位图像调整所述换电设备的位置,以使所述换电设备与待解锁的所述电池包对位。
118.该技术方案在举升换电设备之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的换电设备碰撞或刮蹭的风险。
119.较佳地,所述换电控制方法还包括:
120.当所述电池包完成解锁后,控制所述换电设备夹持并取出所述电池包。
121.该技术方案可以保证换电设备能够高效准确的获取电池包。
122.较佳地,所述换电控制方法还包括:
123.当所述电池包被取出后,控制所述换电设备下降。
124.该技术方案可以及时将电池包取下,以方便电池包尽快进入后续充电流程。
125.一种基于换电设备的换电控制系统,所述换电设备用于对电动汽车上的电池包进行更换,所述电动汽车上设有锁止机构,所述锁止机构用于锁止固定所述电池包,所述锁止机构包括固定部和活动部,所述固定部内具有供电池包锁轴移动到锁止位置的锁槽,所述活动部相对所述固定部在锁止状态和解锁状态之间切换,以关闭或打开所述锁轴进出所述锁槽的开口,所述换电控制系统包括:
126.第一举升控制模块,用于控制所述换电设备将所述电池包举升到电动汽车底部的第一预设高度;
127.第一平移控制模块,用于控制所述换电设备将所述电池包的锁轴沿所述锁槽向所
述锁止位置移动;
128.第一图像采集模块,用于采集所述活动部相对所述固定部在所述电池包的锁轴沿所述锁槽移动过程中的第一实时图像;
129.锁止调节模块,用于根据所述第一实时图像与所述活动部位于所述锁止位置时的第一标准图像判断所述锁止机构是否锁止完成,并执行相应动作。
130.该技术方案不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
131.一种基于换电设备的换电控制系统,所述换电设备用于对电动汽车上的电池包进行更换,所述电动汽车上设有锁止机构,所述锁止机构用于锁止固定所述电池包,所述锁止机构包括固定部和活动部,所述固定部内具有供电池包锁轴移动到锁止位置的锁槽,所述活动部相对所述固定部在锁止状态和解锁状态之间切换,以关闭或打开所述锁轴进出所述锁槽的开口,所述换电控制系统包括:
132.第二举升控制模块,用于控制所述换电设备举升到电动汽车底部的第二预设高度;
133.第二平移控制模块,用于控制所述换电设备将所述电池包的锁轴沿所述锁槽向解锁预紧位置移动,使所述活动部相对所述固定部从锁止状态移动到解锁状态;
134.第二图像采集模块,用于采集所述活动部相对所述固定部在所述活动部向解锁状态移动过程中的第二实时图像;
135.解锁调节模块,用于根据所述第二实时图像与所述活动部位于解锁状态时的第二标准图像判断所述锁止机构是否解锁完成,并执行相应动作。
136.该技术方案不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
137.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行计算机程序时实现前述的基于换电设备的换电控制方法的步骤。
138.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现前述的基于换电设备的换电控制方法的步骤。
139.本发明的积极进步效果在于:本发明提供的换电设备的换电控制方法以及系统,在控制电池包锁止或解锁的过程中,不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
附图说明
140.图1为本发明实施例1-实施例6中的锁止机构的结构示意图。
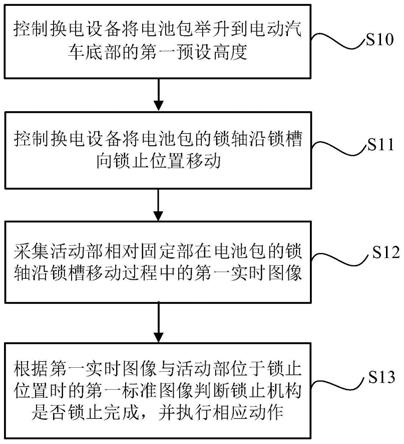
141.图2为本发明实施例1的换电控制方法的第一种具体实施方式的流程图。
142.图3为本发明实施例1的第一种具体实施方式的步骤s13的流程图。
143.图4为本发明实施例1和实施例3中锁止机构是否锁止的判断原理示意图。
144.图5为本发明实施例1的换电控制方法的第二种具体实施方式的流程图。
145.图6为本发明实施例1的换电控制方法的第三种具体实施方式的流程图。
146.图7为本发明实施例1的换电控制方法的第四种具体实施方式的流程图。
147.图8为本发明实施例1的换电控制方法的第四种具体实施方式中的步骤s19的流程图。
148.图9为本发明实施例2的换电控制方法的第一种具体实施方式的流程图。
149.图10为本发明实施例2的第一种具体实施方式的步骤s23的流程图。
150.图11为本发明实施例2和实施例4中锁止机构是否解锁的判断原理示意图。
151.图12为本发明实施例2的换电控制方法的第二种具体实施方式的流程图。
152.图13为本发明实施例2的换电控制方法的第三种具体实施方式的流程图。
153.图14为本发明实施例2的换电控制方法的第四种具体实施方式的流程图。
154.图15为本发明实施例2的换电控制方法的第四种具体实施方式中的步骤s29的流程图。
155.图16为本发明实施例3的基于换电设备的换电控制系统的结构框图。
156.图17为本发明实施例4的基于换电设备的换电控制系统的结构框图。
157.图18为本发明实施例5的电子设备的结构框图。
具体实施方式
158.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
159.实施例1
160.本实施例提供一种基于换电设备的换电控制方法,换电设备用于对电动汽车上的电池包进行更换,电动汽车上设有锁止机构,锁止机构用于锁止固定电池包,锁止机构包括固定部和活动部,固定部内具有供电池包锁轴移动到锁止位置的锁槽,活动部相对固定部在锁止状态和解锁状态之间切换,以关闭或打开锁轴进出锁槽的开口。
161.具体地,如图1所示,固定部可以包括锁基座10,活动部可以包括锁止杆11和锁舌12,锁舌12绕旋转轴可转动安装于锁基座10,锁基座10具有锁槽,供电池包的锁轴锁止固定,锁槽具有开口,电池包的锁轴通过该开口进出锁槽,锁止杆11与锁舌12可转动连接且设于锁基座10上方,通过直接驱动锁舌12或锁止杆11带动锁舌12转动,使锁舌12在锁止状态和解锁状态之间切换,以关闭或打开锁槽开口,锁止杆11可以是长条形的杆状结构的杆件,该锁止杆11可与多个锁基座10通过锁舌12活动连接,从而实现多个锁舌12对锁轴的同步锁止和解锁。
162.如图2所示,换电控制方法可以包括如下步骤:步骤s10:控制换电设备将电池包举升到电动汽车底部的第一预设高度;
163.具体地,可以采集换电设备距离基准面的实时高度,基准面为换电设备的行驶平面或电动汽车的停靠平面;然后,判断所述第一实时高度是否落入第一预设高度范围内;若否,则根据所述第一实时高度与所述第一预设高度的第一高度差值控制所述换电设备的举升高度,直至所述换电设备举升电池包到达所述电动汽车底部的所述第一预设高度。
164.该步骤可以通过在换电设备上设置测距仪或视觉传感器,检测换电设备举升过程
中相对其行驶平面或电动汽车停靠平面的实时高度值,判断该实时高度值是否到达第一预设高度,若到达第一预设高度,则停止举升。
165.优选地,第一预设高度包括第一举升高度和第二举升高度,换电设备在第一举升高度内的举升速度大于换电设备在第二举升高度内的举升速度;其中,在第一举升高度时,换电设备的导向叉刚进入电池托架内,在第二举升高度时,电池包的锁轴进入固定部,并且锁轴将活动部顶起,以打开锁轴进入锁槽的开口。
166.通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证电池包的锁轴不受损坏,提高了安全性。
167.另外,本领域技术人员可以根据具体应用场景的需要而适应性的设置不同的举升速度,本实施例对此不作限制。
168.步骤s11:控制换电设备将电池包的锁轴沿锁槽向锁止位置移动;锁止位置是电池包的锁轴被锁舌完全固定的位置。
169.步骤s12:采集活动部相对固定部在电池包的锁轴沿锁槽移动过程中的第一实时图像;
170.具体地,第一实时图像可以是锁舌12相对固定部的第一端部实时图像;第一实时图像也可以是锁止杆11突出固定部侧壁的第二端部实时图像。
171.步骤s13:根据第一实时图像与活动部位于锁止位置时的第一标准图像判断锁止机构是否锁止完成,并执行相应动作。
172.具体地,如图3所示,步骤s13可以包括:
173.步骤s131:判断第一实时图像与活动部位于锁止位置时的第一标准图像是否在预设误差范围内;
174.若是,则执行步骤s132:停止换电设备向锁槽内的锁止位置移动电池包。
175.若否,则转而执行前述步骤s11:控制换电设备将电池包的锁轴沿锁槽向锁止位置移动。
176.需要说明的是,实时图像和标准图像可以是视频形式或者照片形式,本实施例对此不作限制。当实时图像与标准图像为视频形式时,图像之间以帧(每一帧都可以作为独立的图片)为单位进行对比,当实时图像与标准图像为图片形式时,图像之间以每幅图为单位进行对比。
177.若所示第一实时图像是锁舌12相对固定部的第一端部实时图像,则可以根据第一端部实时图像与锁舌12位于锁止位置时的第一标准图像判断锁止机构是否锁止完成,根据判断结果调整电池包的移动距离。若判断结果为锁止未完成,则继续在锁槽中移动锁轴。
178.若第一实时图像是锁止杆11突出固定部侧壁的第二端部实时图像,则可以根据第二端部实时图像与锁止杆11在锁止状态时的第一标准图像判断锁止机构是否锁止完成,根据判断结果调整电池包的移动距离。若判断结果为锁止未完成,则继续在锁槽中移动锁轴。
179.进一步地,可以根据锁止杆11突出固定部侧壁的第二端部实时图像获取锁止杆11的端部13距离预设基准线的距离差值,并根据距离差值平移电池包的锁轴。
180.具体的,可以通过采集锁止杆的第二端部实时图像,根据实时图像的像素处理成距离数据,然后判断是否落入预设的标准距离范围内,若未落入预设的标准距离范围,则继续在锁槽内平移电池包的锁轴。
181.更具体地,请参考附图4,摄像头固定安装在锁止机构的下方,并且从下向上成仰视角度持续拍摄锁止机构,采集活动部的实时图像,并将连续多个实时图像不断与标准图像进行对比,根据实时图像中的锁止杆11的端部13与标准图像中的锁止杆11的端部13的重合程度来判断是否执行距离判断操作,若重合程度在预设范围内,则根据实时图像计算锁止杆11的端部13所在的边界线18与摄像头视野边框14的左边界线17(即预设基准线)之间的距离d3,由于摄像头一直处于固定位置,因此,视野边框14以及左边界线17也处于固定位置。接下来,判断d3是否在预设标准距离范围,其中标准距离范围是通过第一标准线15和第二标准线16构成的区域范围,其中,第一标准线15与左边界线17之间的距离为第一距离d1,第二标准线16与左边界线17之间的距离为第二距离d2内,若d3处于d1和d2之间,则认为锁止机构锁止完成。可以理解的是,设置预设标准距离范围是考虑到不同电动汽车的电池机构和锁止机构在配合的过程中存在误差。
182.本实施例中,将实时图像的像素处理成距离数据可以采用摄像领域的常规现有技术。
183.本实施例可以通过锁舌12或锁止杆11的实时状态来判断锁止机构是否锁止完成,判断结果直观、准确。
184.可以理解的是,电池包的侧边上可以设置多个锁轴,同时插入位于电动汽车上的多个锁基座10内,将电池包固定在电池汽车上,利用锁止杆11的动作可以自动将多个锁轴由锁基座10上同时锁定,大大提高换电效率。
185.在其它实施方式中,如图5所示,步骤s10之前还可以包括:
186.步骤s14:控制换电设备将电池包的锁轴移动到第一预设坐标,以使电池包的锁轴与锁止机构对位;或者,步骤s15:通过视觉传感器实时采集锁止机构的第一实时对位图像,并根据第一实时对位图像调整锁轴的位置,以使电池包的锁轴与锁止机构对位。
187.本实施例在利用换电设备举升电池包之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的电池包碰撞或刮蹭的风险。
188.本实施例中,换电控制方法还可以包括如下步骤:
189.步骤s16:当电池包到达锁止位置后,控制换电设备下降。
190.在这个过程中,电池包到达锁止位置后,首先控制换电设备上的夹持机构放开对电池包的夹持,然后夹持机构回缩,接下来,控制换电设备按照预设的速度下降。本实施方式可以通过及时控制换电设备下降来及时结束换电,方便电动汽车尽快启动开走,以方便为其他电动汽车继续换电。
191.本实施例中,换电控制方法还可以包括如下步骤:
192.步骤s17:当电池包到达锁止位置后,控制电池包的锁轴向锁槽开口方向回退预设距离,以使锁轴抵靠活动部。本实施方式可以提高电池包锁止的牢固性,防止电池包在为电动汽车供电时发生滑移造成接触不良,提高了用户体验。
193.在其他实施方式中,如图6所示,步骤s10之后还可以包括如下步骤:
194.步骤s18:触发第一换电信号,并等待第一预设时间。等待第一预设之间之后,再执行步骤s11。
195.具体地,可以检测换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第一换电信号,第一换电信号用于控制电动汽车的点火开关切换至关闭状态。导向
叉可以设置在换电设备的上部。具体的,导向叉上设有检测对象,电池托架上设有检测传感器,当导向叉与电池托架的距离小于预设阈值时,电池托架上的检测传感器检测到检测对象,并向电动汽车的点火控制单元发送检测信号,点火控制单元根据该检测信号控制点火关闭。
196.在其他实施方式中,如图7所示,步骤s10之前还可以包括如下步骤:
197.步骤s19:触发第二换电信号,并等待第二预设时间。等待第二预设时间后再执行步骤s10。
198.优选地,如图8所示,步骤s19具体可以包括:
199.步骤s191:接收电动汽车发送的车辆状态信息,车辆状态信息包括车牌信息和钥匙信号,车牌信息与钥匙信号一一对应;步骤s192:解析钥匙信号;步骤s193:若钥匙信号表明电动汽车处于未熄火状态,则生成车牌信息对应的第二换电信号,第二换电信号用于控制车牌信息对应的电动汽车的点火开关切换至关闭状态。本实施例通过设置第一换电信号和/或第二换电信号,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
200.本实施例中,电池包的锁轴上设有第一待测单元,电动汽车的电池托架上设有第一落锁检测传感器;换电控制方法还包括:判断第一落锁检测传感器是否检测到第一待测单元,若是,则确定电池包的锁轴移动到锁止位置;和/或,活动部包括锁舌12,锁舌12上设有第二待测单元,电动汽车的电池托架上设有第二落锁检测传感器;换电控制方法还包括:判断第二落锁检测传感器是否检测到第二待测单元,若是,则确定电池包的锁轴移动到锁止位置;和/或,活动部包括锁止杆11,锁止杆11上设有第三待测单元,电动汽车的电池托架上设有第三落锁检测传感器;换电控制方法还包括:判断第三落锁检测传感器是否检测到第三待测单元,若是,则确定电池包的锁轴移动到锁止位置。
201.优选地,第一待测单元、第二待测单元以及第三待测单元可以是磁性元件(例如:永磁体),磁性元件向外发散有磁场(磁力线),落锁检测传感器可以通过识别磁场来检测磁性元件。
202.本实施例还可以通过多个落锁检测传感器对锁止结果进行进一步确认,保证了换电过程高效、准确的完成。
203.本实施例提供的基于换电设备的换电控制方法在运行时,不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
204.实施例2
205.本实施例提供一种基于换电设备的换电控制方法,换电设备用于对电动汽车上的电池包进行更换,电动汽车上设有锁止机构,锁止机构用于锁止固定电池包,锁止机构包括固定部和活动部,固定部内具有供电池包锁轴移动到锁止位置的锁槽,活动部相对固定部在锁止状态和解锁状态之间切换,以关闭或打开锁轴进出锁槽的开口。
206.具体地,如图1所示,固定部可以包括锁基座10,活动部可以包括锁止杆11和锁舌12,锁舌12绕旋转轴可转动安装于锁基座10,锁基座10具有锁槽,供电池包的锁轴锁止固定,锁槽具有开口,电池包的锁轴通过该开口进出锁槽,锁止杆11与锁舌12可转动连接且设于锁基座10上方,通过直接驱动锁舌12或锁止杆11带动锁舌12转动,使锁舌12在锁止状态
和解锁状态之间切换,以关闭或打开锁槽开口,锁止杆11可以是长条形的杆状结构的杆件,该锁止杆11可与多个锁基座10通过锁舌12活动连接,从而实现多个锁舌对锁轴的同步锁止和解锁。
207.如图9所示,换电控制方法可以包括如下步骤:
208.步骤s20:控制换电设备举升到电动汽车底部的第二预设高度;
209.具体地,可以采集换电设备距离基准面的第二实时高度,基准面为换电设备的行驶平面或电动汽车的停靠平面;判断所述第二实时高度是否落入第二预设高度范围内;若否,则根据所述第二实时高度与第二预设高度的第二高度差值控制所述换电设备的举升高度,直至所述换电设备到达所述电动汽车底部的第二预设高度。
210.该步骤是通过在换电设备上设置测距仪或视觉传感器,检测换电设备举升过程中相对其行驶平面或电动汽车停靠平面的实时高度值,判断该实时高度值是否到达第二预设高度,若到达第二预设高度,则停止举升。
211.通过实时高度与预设高度的对比来共同完成换电设备的举高,提高了举升准确性。
212.步骤s21:控制换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动(即控制换电设备向锁槽开口方向移动电池包),使活动部相对固定部从锁止状态向解锁状态移动;
213.优选地,第二预设高度包括第三举升高度和第四举升高度,换电设备在第三举升高度内的举升速度大于换电设备在第四举升高度内的举升速度;其中,在第三举升高度时,换电设备的导向叉刚进入电池托架内,在第四举升高度时,换电设备接触到待解锁的电池包。
214.通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证换电设备的导向叉不受损坏,提高了安全性。
215.另外,本领域技术人员可以根据具体应用场景的需要而适应性的设置不同的举升速度,本实施例对此不作限制。
216.步骤s22:采集活动部相对固定部在活动部向解锁状态移动过程中的第二实时图像;
217.具体地,第二实时图像可以是锁舌12相对固定部的第三端部实时图像,或者,第二实时图像还可以是锁止杆11突出固定部侧壁的第四端部实时图像。
218.步骤s23:根据第二实时图像与活动部位于解锁状态时的第二标准图像判断锁止机构是否解锁完成,并执行相应动作。
219.具体地,如图10所示,步骤s23具体可以包括:
220.步骤s231:判断第二实时图像与活动部位于解锁状态时的第二标准图像是否在预设误差范围内;
221.若否,则转而执行步骤s21:控制换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动,使活动部相对固定部从锁止状态向解锁状态移动;
222.若是,则执行步骤s232:停止换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动。
223.需要说明的是,实时图像和标准图像可以是视频形式或者照片形式,本实施例对此不作限制。当实时图像与标准图像为视频形式时,图像之间以帧(每一帧都可以作为独立
的图片)为单位进行对比,当实时图像与标准图像为图片形式时,图像之间以每幅图为单位进行对比。
224.若所示第二实时图像是锁舌12相对固定部的第三端部实时图像,则可以采集锁舌12相对固定部的第三端部实时图像,然后,根据第三端部实时图像与锁舌12位于解锁预紧位置时的第二标准图像判断锁止机构是否解锁完成,根据判断结果调整电池包的移动距离。
225.若第二实时图像是锁止杆11突出固定部侧壁的第四端部实时图像,则可以采集在电池包的锁轴沿锁槽移动过程中的锁止杆11突出固定部侧壁的第四端部实时图像;然后,根据第四端部实时图像与锁止杆11在解锁状态时的第二标准图像判断锁止机构是否解锁完成,根据判断结果调整电池包的移动距离。
226.进一步地,可以根据锁止杆11突出固定部侧壁的第四端部实时图像获取锁止杆11的端部13距离固定部的距离差值,并根据距离差值平移电池包的锁轴。
227.具体的,可以通过采集锁止杆的第四端部实时图像,根据实时图像的像素处理成距离数据,然后判断该距离数据是否落入预设的标准距离之外,若未落入预设的标准距离之外,则继续在锁槽内平移电池包的锁轴。
228.更具体地,请参考附图11,摄像头固定安装在锁止机构的下方,并且从下向上成仰视角度持续拍摄锁止机构,采集活动部的实时图像,并将连续多个实时图像不断与标准图像进行对比,根据实时图像中的锁止杆11的端部13与标准图像中的锁止杆11的端部13的重合程度来判断是否执行距离判断操作,若重合程度在预设范围内,则根据实时图像计算锁止杆11的端部13所在的边界线18与摄像头视野边框14的左边界线17(即预设基准线)之间的距离d5,由于摄像头一直处于固定位置,因此,视野边框14以及左边界线17也处于固定位置。接下来,判断d5是否在预设标准距离之外,此处的标准距离是通过第三标准线19来界定,其中,第三标准线19与左边界线17之间的距离为第四距离d4,若d5大于d4,则认为锁止机构解锁完成。
229.本实施例中,将实时图像的像素处理成距离数据可以采用摄像领域的常规现有技术。本实施例可以通过锁舌12或锁止杆11的实时状态来判断锁止机构是否解锁完成,判断结果直观、准确。
230.在其他实施方式中,在其他实施方式中,如图12所示,步骤s20之前还可以包括:
231.步骤s24:控制换电设备移动到第二预设坐标,以使换电设备与待解锁的电池包对位;或者,步骤s25:通过视觉传感器实时采集换电设备的第二实时对位图像,并根据第二实时对位图像调整换电设备的位置,以使换电设备与待解锁的电池包对位。
232.本实施例在举升换电设备之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的换电设备碰撞或刮蹭的风险。
233.本实施例中,换电控制方法还包括:
234.步骤s26:当电池包完成解锁后,控制换电设备夹持并取出电池包。
235.在这个过程中,电池包完成解锁后,首先控制换电设备上的夹持机构向电池包的方向伸出,然后控制夹持结构夹持住电池包并将电池包从电池托架中取出。本实施方式可以保证换电设备能够高效准确的获取电池包。
236.本实施例中,换电控制方法还包括:
237.步骤s27:当电池包被取出后,控制换电设备下降。本实施方式可以及时将电池包取下,以方便电池包尽快进入后续充电流程。
238.如图13所示,在其他实施方式中,步骤s20之后还可以包括如下步骤:
239.步骤s28:触发第三换电信号,并等待第三预设时间。然后,再控制换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动。
240.具体地,可以检测换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第三换电信号,第三换电信号用于控制电动汽车的点火开关切换至关闭状态。导向叉可以设置在换电设备的上部。具体的,导向叉上设有检测对象,电池托架上设有检测传感器,当导向叉与电池托架的距离小于阈值时,检测传感器检测到检测对象,并向点火控制单元发送检测信号,点火控制单元根据该检测信号控制点火关闭。
241.在其他实施方式中,如图14所示,步骤s20之前还可以包括如下步骤:
242.步骤s29:触发第四换电信号,并等待第四预设时间。然后,控制换电设备举升到电动汽车底部的第二预设高度。
243.优选地,如图15所示,步骤s29具体可以包括:步骤s291:接收电动汽车发送的车辆状态信息,车辆状态信息包括车牌信息和钥匙信号,车牌信息与钥匙信号一一对应;步骤s292:解析钥匙信号;步骤s293:若钥匙信号表明电动汽车处于未熄火状态,则生成车牌信息对应的第四换电信号,第四换电信号用于控制车牌信息对应的电动汽车的点火开关切换至关闭状态。
244.该实施例通过设置第三换电信号和/或第四换电信号,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
245.本实施例中,电池包的锁轴上设有第四待测单元,电动汽车的电池托架上设有第一解锁检测传感器;换电控制方法还包括:判断第一解锁检测传感器是否检测到第四待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置;和/或,活动部包括锁舌12,锁舌12上设有第五待测单元,电动汽车的电池托架上设有第二解锁检测传感器;换电控制方法还包括:判断第二解锁检测传感器是否检测到第五待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置;和/或,活动部包括锁止杆11,锁止杆11上设有第六待测单元,电动汽车的电池托架上设有第三解锁检测传感器;换电控制方法还包括:判断第三解锁检测传感器是否检测到第六待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置。
246.优选地,第四待测单元、第五待测单元以及第六待测单元可以是磁性元件(例如:永磁体),磁性元件向外发散有磁场(磁力线),落锁检测传感器可以通过识别磁场来检测磁性元件。
247.本实施例还可以通过多个解锁检测传感器对解锁结果进行进一步确认,保证了换电过程高效、准确的完成。
248.本实施例提供的基于换电设备的换电控制方法在运行时,不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
249.实施例3
250.本实施例提供一种基于换电设备的换电控制系统,换电设备用于对电动汽车上的
电池包进行更换,电动汽车上设有锁止机构,锁止机构用于锁止固定电池包,锁止机构包括固定部和活动部,固定部内具有供电池包锁轴移动到锁止位置的锁槽,活动部相对固定部在锁止状态和解锁状态之间切换,以关闭或打开锁轴进出锁槽的开口。
251.具体地,如图1所示,固定部可以包括锁基座10,活动部可以包括锁止杆11和锁舌12,锁舌12绕旋转轴可转动安装于锁基座10,锁基座10具有锁槽,供电池包的锁轴锁止固定,锁槽具有开口,电池包的锁轴通过该开口进出锁槽,锁止杆11与锁舌12可转动连接且设于锁基座10上方,通过直接驱动锁舌12或锁止杆11带动锁舌12转动,使锁舌12在锁止状态和解锁状态之间切换,以关闭或打开锁槽开口,锁止杆11可以是长条形的杆状结构的杆件,该锁止杆11可与多个锁基座10通过锁舌12活动连接,从而实现多个锁舌对锁轴的同步锁止和解锁。
252.如图16所示,本实施例中的换电控制系统2可以包括:
253.第一举升控制模块21,用于控制换电设备将电池包举升到电动汽车底部的第一预设高度;
254.第一举升控制模块21用于采集换电设备距离基准面的实时高度,基准面为换电设备的行驶平面或电动汽车的停靠平面;判断所述第一实时高度是否落入第一预设高度范围内;若否,则根据所述第一实时高度与所述第一预设高度的第一高度差值控制所述换电设备的举升高度,直至所述换电设备举升电池包到达所述电动汽车底部的所述第一预设高度。
255.优选地,第一预设高度包括第一举升高度和第二举升高度,换电设备在第一举升高度内的举升速度大于换电设备在第二举升高度内的举升速度;其中,在第一举升高度时,换电设备的导向叉刚进入电池托架内,在第二举升高度时,电池包的锁轴进入固定部,并且锁轴将活动部顶起,以打开锁轴进入锁槽的开口。
256.通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证电池包的锁轴不受损坏,提高了安全性。
257.另外,本领域技术人员可以根据具体应用场景的需要而适应性的设置不同的举升速度,本实施例对此不作限制。
258.第一平移控制模块22,用于控制换电设备将电池包的锁轴沿锁槽向锁止位置移动;锁止位置是电池包的锁轴被锁舌12完全固定的位置。
259.第一图像采集模块23,用于采集活动部相对固定部在电池包的锁轴沿锁槽移动过程中的第一实时图像;
260.具体地,第一实时图像可以是锁舌12相对固定部的第一端部实时图像;第一实时图像也可以是锁止杆11突出固定部侧壁的第二端部实时图像。
261.锁止调节模块24,用于根据第一实时图像与活动部位于锁止位置时的第一标准图像判断锁止机构是否锁止完成,并执行相应动作。
262.具体地,锁止调节模块24用于判断第一实时图像与活动部位于锁止位置时的第一标准图像是否在预设误差范围内;若是,则停止换电设备向锁槽内的锁止位置移动电池包;若是,则调用第一平移控制模块22。
263.需要说明的是,实时图像和标准图像可以是视频形式或者照片形式,本实施例对此不作限制。当实时图像与标准图像为视频形式时,图像之间以帧(每一帧都可以作为独立
的图片)为单位进行对比,当实时图像与标准图像为图片形式时,图像之间以每幅图为单位进行对比。
264.若所示第一实时图像是锁舌12相对固定部的第一端部实时图像,则第一图像采集模块23用于采集在电池包的锁轴沿锁槽移动过程中的锁舌12相对固定部的第一端部实时图像;锁止调节模块24用于根据第一端部实时图像与锁舌12位于锁止位置时的第一标准图像判断锁止机构是否锁止完成,根据判断结果调整电池包的移动距离。
265.若第一实时图像是锁止杆11突出固定部侧壁的第二端部实时图像,则第一图像采集模块23用于采集在电池包的锁轴沿锁槽移动过程中的锁止杆11突出固定部侧壁的第二端部实时图像;锁止调节模块24用于根据第二端部实时图像与锁止杆11在锁止状态时的第一标准图像判断锁止机构是否锁止完成,根据判断结果调整电池包的移动距离。
266.锁止调节模块24用于根据锁止杆11突出固定部侧壁的第二端部实时图像获取锁止杆11的端部13距离固定部的距离差值,并根据距离差值平移电池包的锁轴。
267.具体的,可以根据实时图像的像素处理成距离数据,然后判断是否落入预设的标准距离范围内,若未落入预设的标准距离范围,则继续在锁槽内平移电池包的锁轴。
268.更具体地,请参考附图4,摄像头固定安装在锁止机构的下方,并且从下向上成仰视角度持续拍摄锁止机构,采集活动部的实时图像,并将连续多个实时图像不断与标准图像进行对比,根据实时图像中的锁止杆11的端部13与标准图像中的锁止杆11的端部13的重合程度来判断是否执行距离判断操作,若重合程度在预设范围内,则根据实时图像计算锁止杆11的端部13所在的边界线18与摄像头视野边框14的左边界线17(即预设基准线)之间的距离d3,由于摄像头一直处于固定位置,因此,视野边框14以及左边界线17也处于固定位置。接下来,判断d3是否在预设标准距离范围,其中标准距离范围是通过第一标准线15和第二标准线16构成的区域范围,其中,第一标准线15与左边界线17之间的距离为第一距离d1,第二标准线16与左边界线17之间的距离为第二距离d2内,若d3处于d1和d2之间,则认为锁止机构锁止完成。可以理解的是,设置预设标准距离范围是考虑到不同电动汽车的电池机构和锁止机构在配合的过程中存在误差。
269.本实施例中,将实时图像的像素处理成距离数据可以采用摄像领域的常规现有技术。
270.本实施例可以通过锁舌12或锁止杆11的实时状态来判断锁止机构是否锁止完成,判断结果直观、准确。
271.另外,电池包的侧边上可以设置多个锁轴,同时插入位于电动汽车上的多个锁基座10内,将电池包固定在电池汽车上,利用锁止杆11的动作可以自动将多个锁轴由锁基座10上同时锁定,大大提高换电效率。
272.在其他实施方式中,换电控制系统2还包括第一对位控制模块25,第一对位控制模块25用于利用换电设备将电池包的锁轴移动到第一预设坐标,以使电池包的锁轴与锁止机构对位;或者,第一对位控制模块25用于控制视觉传感器实时采集锁止机构的第一实时对位图像,并根据第一实时对位图像调整锁轴的位置,以使电池包的锁轴与锁止机构对位。
273.本实施例在利用换电设备举升电池包之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的电池包碰撞或刮蹭的风险。
274.进一步地,第一举升控制模块21还用于当电池包到达锁止位置后,控制换电设备
下降。
275.在这个过程中,电池包到达锁止位置后,首先控制换电设备上的夹持机构放开对电池包的夹持,然后夹持机构回缩,接下来,控制换电设备按照预设的速度下降。本实施方式可以通过及时控制换电设备下降来及时结束换电,方便电动汽车尽快启动开走,以方便为其他电动汽车继续换电。
276.进一步地,锁止调节模块24还用于当电池包到达锁止位置后,控制电池包的锁轴向锁槽开口方向回退预设距离,以使锁轴抵靠活动部。
277.本实施方式还可以提高电池包锁止的牢固性,防止电池包在为电动汽车供电时发生滑移造成接触不良,提高了用户体验。
278.在其他实施方式中,换电控制系统2还包括第一换电信号调控模块26,用于触发第一换电信号,并等待第一预设时间。
279.第一换电信号调控模块26用于检测换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第一换电信号,第一换电信号用于控制电动汽车的点火开关切换至关闭状态。导向叉可以设置在换电设备的上部。
280.在其他实施方式中,换电控制系统2还可以包括第二换电信号调控模块27,用于触发第二换电信号,并等待第二预设时间。
281.第二换电信号调控模块27用于接收电动汽车发送的车辆状态信息,车辆状态信息包括车牌信息和钥匙信号,车牌信息与钥匙信号一一对应;解析钥匙信号;若钥匙信号表明电动汽车处于未熄火状态,则生成车牌信息对应的第二换电信号,第二换电信号用于控制车牌信息对应的电动汽车的点火开关切换至关闭状态。
282.本实施例通过设置第一换电信号和/或第二换电信号,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
283.在其他实施方式中,电池包的锁轴上设有第一待测单元,电动汽车的电池托架上设有第一落锁检测传感器;换电控制系统2还包括落锁确定模块28,落锁确定模块28用于判断第一落锁检测传感器是否检测到第一待测单元,若是,则确定电池包的锁轴移动到锁止位置;和/或,活动部包括锁舌12,锁舌12上设有第二待测单元,电动汽车的电池托架上设有第二落锁检测传感器;落锁确定模块28还用于判断第二落锁检测传感器是否检测到第二待测单元,若是,则确定电池包的锁轴移动到锁止位置;和/或,活动部包括锁止杆11,锁止杆11上设有第三待测单元,电动汽车的电池托架上设有第三落锁检测传感器;落锁确定模块28还用于判断第三落锁检测传感器是否检测到第三待测单元,若是,则确定电池包的锁轴移动到锁止位置。
284.优选地,第一待测单元、第二待测单元以及第三待测单元可以是磁性元件(例如:永磁体),磁性元件向外发散有磁场(磁力线),落锁检测传感器可以通过识别磁场来检测磁性元件。
285.本实施例还可以通过多个落锁检测传感器对锁止结果进行进一步确认,保证了换电过程高效、准确的完成。
286.本实施例提供的基于换电设备的换电控制系统在运行时,不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流
程。
287.实施例4
288.一种基于换电设备的换电控制系统,换电设备用于对电动汽车上的电池包进行更换,电动汽车上设有锁止机构,锁止机构用于锁止固定电池包,锁止机构包括固定部和活动部,固定部内具有供电池包锁轴移动到锁止位置的锁槽,活动部相对固定部在锁止状态和解锁状态之间切换,以关闭或打开锁轴进出锁槽的开口。
289.具体地,如图1所示,固定部可以包括锁基座10,活动部可以包括锁止杆11和锁舌12,锁舌12绕旋转轴可转动安装于锁基座10,锁基座10具有锁槽,供电池包的锁轴锁止固定,锁槽具有开口,电池包的锁轴通过该开口进出锁槽,锁止杆11与锁舌12可转动连接且设于锁基座10上方,通过直接驱动锁舌12或锁止杆11带动锁舌12转动,使锁舌12在锁止状态和解锁状态之间切换,以关闭或打开锁槽开口,锁止杆11可以是长条形的杆状结构的杆件,该锁止杆11可与多个锁基座10通过锁舌12活动连接,从而实现多个锁舌对锁轴的同步锁止和解锁。
290.如图17所示,本实施例中的换电控制系统3可以包括:
291.第二举升控制模块31,用于控制换电设备举升到电动汽车底部的第二预设高度;
292.具体地,第二举升控制模块31用于采集换电设备距离基准面的第二实时高度,基准面为换电设备的行驶平面或电动汽车的停靠平面;判断所述第二实时高度是否落入第二预设高度范围内;若否,则根据所述第二实时高度与第二预设高度的第二高度差值控制所述换电设备的举升高度,直至所述换电设备到达所述电动汽车底部的第二预设高度。
293.优选地,第二预设高度包括第三举升高度和第四举升高度,换电设备在第三举升高度内的举升速度大于换电设备在第四举升高度内的举升速度;其中,在第三举升高度时,换电设备的导向叉刚进入电池托架内,在第四举升高度时,换电设备接触到待解锁的电池包。通过为不同的预设高度设置不同的举升速度,在兼顾效率的同时,还可以保证换电设备的导向叉不受损坏,提高了安全性。
294.本领域技术人员可以根据具体应用场景的需要而适应性的设置不同的举升速度,本实施例对此不作限制。
295.第二平移控制模块32,用于控制换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动,使活动部相对固定部从锁止状态移动到解锁状态;解锁状态是指活动部解除对锁轴的锁止,电池包可以被取下的状态。
296.第二图像采集模块33,用于采集活动部相对固定部在活动部向解锁状态移动过程中的第二实时图像;
297.第二实时图像可以是锁舌12相对固定部的第三端部实时图像,或者,第二实时图像还可以是锁止杆11突出固定部侧壁的第四端部实时图像。
298.解锁调节模块34,用于根据第二实时图像与活动部位于解锁状态时的第二标准图像判断锁止机构是否解锁完成,并执行相应动作。
299.具体地,解锁调节模块34用于判断第二实时图像与活动部位于解锁状态时的第二标准图像是否在预设误差范围内;若否,则调用第二平移控制模块32;若是,则停止换电设备将电池包的锁轴沿锁槽向解锁预紧位置移动。
300.需要说明的是,实时图像和标准图像可以是视频形式或者照片形式,本实施例对
此不作限制。当实时图像与标准图像为视频形式时,图像之间以帧(每一帧都可以作为独立的图片)为单位进行对比,当实时图像与标准图像为图片形式时,图像之间以每幅图为单位进行对比。
301.若所示第二实时图像是锁舌12相对固定部的第三端部实时图像,则第二图像采集模块33用于采集锁舌12相对固定部的第三端部实时图像;锁止调节模块24用于根据第三端部实时图像与锁舌12位于解锁状态时的第二标准图像判断锁止机构是否解锁完成,根据判断结果调整电池包的移动距离。
302.若第二实时图像是锁止杆11突出固定部侧壁的第四端部实时图像,则第二图像采集模块33用于采集在电池包的锁轴沿锁槽移动过程中的锁止杆11突出固定部侧壁的第四端部实时图像;锁止调节模块24用于根据第四端部实时图像与锁止杆11在解锁状态时的第二标准图像判断锁止机构是否解锁完成,根据判断结果调整电池包的移动距离。
303.进一步地,可以根据锁止杆11突出固定部侧壁的第四端部实时图像获取锁止杆11的端部13距离固定部的距离差值,并根据距离差值平移电池包的锁轴。
304.具体的,可以通过采集锁止杆的第四端部实时图像,根据实时图像的像素处理成距离数据,然后判断该距离数据是否落入预设的标准距离之外,若未落入预设的标准距离之外,则继续在锁槽内平移电池包的锁轴。
305.更具体地,请参考附图11,摄像头固定安装在锁止机构的下方,并且从下向上成仰视角度持续拍摄锁止机构,采集活动部的实时图像,并将连续多个实时图像不断与标准图像进行对比,根据实时图像中的锁止杆11的端部13与标准图像中的锁止杆11的端部13的重合程度来判断是否执行距离判断操作,若重合程度在预设范围内,则根据实时图像计算锁止杆11的端部13所在的边界线18与摄像头视野边框14的左边界线17(即预设基准线)之间的距离d5,由于摄像头一直处于固定位置,因此,视野边框14以及左边界线17也处于固定位置。接下来,判断d5是否在预设标准距离之外,此处的标准距离是通过第三标准线19来界定,其中,第三标准线19与左边界线17之间的距离为第四距离d4,若d5大于d4,则认为锁止机构解锁完成。
306.本实施例中,将实时图像的像素处理成距离数据可以采用摄像领域的常规现有技术。
307.本实施例可以通过锁舌12或锁止杆11的实时状态来判断锁止机构是否解锁完成,判断结果直观、准确。
308.在其他实施方式中,换电控制系统3还可以包括第三换电信号调控模块36,用于触发第三换电信号,并等待第三预设时间。
309.第三换电信号调控模块36用于检测换电设备的导向叉与电池托架的距离是否小于预设阈值,若是,则生成第三换电信号,第三换电信号用于控制电动汽车的点火开关切换至关闭状态。
310.在其他实施方式中,换电控制系统3还包括第四换电信号调控模块37,用于触发第四换电信号,并等待第四预设时间。
311.第四换电信号调控模块37用于接收电动汽车发送的车辆状态信息,车辆状态信息包括车牌信息和钥匙信号,车牌信息与钥匙信号一一对应;解析钥匙信号;若钥匙信号表明电动汽车处于未熄火状态,则生成车牌信息对应的第四换电信号,第四换电信号用于控制
车牌信息对应的电动汽车的点火开关切换至关闭状态。
312.前述实施方式通过设置第三换电信号和/或第四换电信号,保证换电过程处于汽车熄火的状态下,提高了换电操作的安全性。
313.在其他实施方式中,电池包的锁轴上设有第四待测单元,电动汽车的电池托架上设有第一解锁检测传感器,换电控制系统3还包括解锁确定模块38,解锁确定模块38用于判断第一解锁检测传感器是否检测到第四待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置;和/或,活动部包括锁舌12,锁舌12上设有第五待测单元,电动汽车的电池托架上设有第二解锁检测传感器,解锁确定模块38还用于判断第二解锁检测传感器是否检测到第五待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置;和/或,活动部包括锁止杆11,锁止杆11上设有第六待测单元,电动汽车的电池托架上设有第三解锁检测传感器,解锁确定模块38还用于判断第三解锁检测传感器是否检测到第六待测单元,若是,则确定电池包的锁轴移动到解锁预紧位置。
314.优选地,第四待测单元、第五待测单元以及第六待测单元可以是磁性元件(例如:永磁体),磁性元件向外发散有磁场(磁力线),落锁检测传感器可以通过识别磁场来检测磁性元件。
315.本实施方式还可以通过多个解锁检测传感器对解锁结果进行进一步确认,保证了换电过程高效、准确的完成。
316.在其他实施方式中,换电控制系统3还包括第二对位控制模块35,第二对位控制模块35用于将换电设备移动到第二预设坐标,以使换电设备与待解锁的电池包对位;或者,第二对位控制模块35还用于控制视觉传感器实时采集换电设备的第二实时对位图像,并根据第二实时对位图像调整换电设备的位置,以使换电设备与待解锁的电池包对位。
317.本实施方式在举升换电设备之前先进行对位操作,提高了举升的准确性,并且可以避免因对位不准而造成的换电设备碰撞或刮蹭的风险。
318.进一步地,解锁调节模块34还用于当电池包完成解锁后,控制换电设备夹持并取出电池包。
319.在这个过程中,电池包完成解锁后,首先控制换电设备上的夹持机构向电池包的方向伸出,然后控制夹持结构夹持住电池包并将电池包从电池托架中取出。本实施方式可以保证换电设备能够高效准确的获取电池包。
320.进一步地,第二举升控制模块31还用于当电池包被取出后,控制换电设备下降。
321.本实施方式可以及时将电池包取下,以方便电池包尽快进入后续充电流程。
322.本实施例提供的基于换电设备的换电控制系统在运行时,不需要依赖电动汽车侧和换电设备侧的次级模块,避免了次级模块与换电设备进行交互的过程中,信号容易因外部干扰而失去准确性,影响了换电效率的问题,还可以节约次级模块成本,优化了换电流程。
323.实施例5
324.本发明还提供一种电子设备,如图18所示,电子设备可以包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现前述实施例1或实施例2中的基于换电设备的换电控制方法的步骤。
325.可以理解的是,图18所示的电子设备仅仅是一个示例,不应对本发明实施例的功
能和使用范围带来任何限制。
326.如图18所示,电子设备41可以以通用计算设备的形式表现,例如:其可以为服务器设备。电子设备41的组件可以包括但不限于:上述至少一个处理器42、上述至少一个存储器43、连接不同系统组件(包括存储器43和处理器42)的总线44。
327.总线44可以包括数据总线、地址总线和控制总线。
328.存储器43可以包括易失性存储器,例如随机存取存储器(ram)431和/或高速缓存存储器432,还可以进一步包括只读存储器(rom)433。
329.存储器43还可以包括具有一组(至少一个)程序模块434的程序工具435(或实用工具),这样的程序模块434包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
330.处理器42通过运行存储在存储器43中的计算机程序,从而执行各种功能应用以及数据处理,例如本发明前述实施例1或实施例2中的基于换电设备的换电控制方法的步骤。
331.电子设备41也可以与一个或多个外部设备45(例如键盘、指向设备等)通信。这种通信可以通过输入/输出(i/o)接口46进行。并且,模型生成的电子设备41还可以通过网络适配器47与一个或者多个网络(例如局域网lan,广域网wan和/或公共网络)通信。
332.如图18所示,网络适配器47可以通过总线44与模型生成的电子设备41的其它模块通信。本领域技术人员应当明白,尽管图中未示出,可以结合模型生成的电子设备41使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理器、外部磁盘驱动阵列、raid(磁盘阵列)系统、磁带驱动器以及数据备份存储系统等。
333.需要说明的是,尽管在上文详细描述中提及了电子设备的若干单元/模块或子单元/模块,但是这种划分仅仅是示例性的并非强制性的。实际上,根据本发明的实施方式,上文描述的两个或更多单元/模块的特征和功能可以在一个单元/模块中具体化。反之,上文描述的一个单元/模块的特征和功能可以进一步划分为由多个单元/模块来具体化。
334.实施例6
335.本实施例提供了一种计算机可读存储介质,其上存储有计算机程序,程序被处理器执行时实现前述实施例1或实施例2中的基于换电设备的换电控制方法的步骤。
336.其中,计算机可读存储介质可以采用的更具体方式可以包括但不限于:便携式盘、硬盘、随机存取存储器、只读存储器、可擦拭可编程只读存储器、光存储器件、磁存储器件或上述的任意合适的组合。
337.在可能的实施方式中,本发明还可以实现为一种程序产品的形式,其包括程序代码,当程序产品在终端设备上运行时,程序代码用于使终端设备执行实现前述实施例1或实施例2中的基于换电设备的换电控制方法的步骤。
338.其中,可以以一种或多种程序设计语言的任意组合来编写用于执行本发明的程序代码,程序代码可以完全地在用户设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户设备上部分在远程设备上执行或完全在远程设备上执行。
339.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1