控制方法、装置及车辆与流程
1.本发明涉及车辆控制技术领域,特别涉及一种控制方法、装置及车辆。
背景技术:
2.随着科学技术的逐渐发展,柴油车凭借自身具有效率高、能耗低、车辆使用寿命长及使用可靠等优势得到了迅速发展。
3.柴油车受空气浓度和压力影响,当柴油车处于高原工况时,由于高原地区的大气压力低,导致柴油车的发动机内部燃料压燃不充分,导致车辆在静止时由驻车(parking,p)挡或空(neutral,n)挡切换到前进(drive,d)挡或倒车(reverse,r)挡时,当动力电池电量值大于预设电量阈值时,如果发动机转速小于目标转速,动力电池驱动皮带驱动起动发电机(belt driven starter generator,bsg)通过助力拖动发动机,使得发动机维持在目标转速;如果电池电量值小于或者等于预设电量阈值时,bsg请求负扭为低压用电器进行供电。
4.因此,在高原工况下,发动机转速较小,导致高原静止工况无法由p挡或n挡切换到d挡或r挡。
技术实现要素:
5.有鉴于此,本发明旨在提出一种控制方法、装置及车辆,以解决高原静止工况无法由p挡或n挡切换到d挡或r挡的问题。
6.为达到上述目的,本发明的技术方案是这样实现的:
7.第一方面,本发明实施例提供了一种控制方法,应用于车辆的整车控制器,所述方法包括:
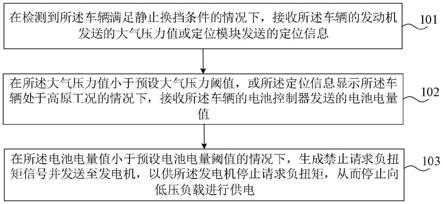
8.在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;
9.在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;
10.在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电。
11.可选地,所述在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机之后,还包括:
12.接收所述发动机发送的泵轮端转速;
13.接收所述车辆的变速箱控制器发送的涡轮端转速;
14.在所述泵轮端转速处于预设泵轮端转速范围内,且所述涡轮端转速处于预设涡轮端转速范围内的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
15.可选地,在所述接收所述车辆的变速箱控制器发送的涡轮端转速之后,还包括:
16.在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,监测所述车辆的换挡时间;
17.在所述换挡时间大于预设换挡时间阈值的情况下,生成换挡失败信号。
18.可选地,所述在监测所述车辆的换挡时间之后,还包括:
19.在所述换挡时间小于或者等于所述预设换挡时间阈值的情况下,生成所述允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
20.可选地,所述接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息之后,还包括:
21.在所述大气压力值大于或者等于所述大气压力阈值的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
22.可选地,所述静止换挡条件包括:档杆位置由驻车挡或者空挡切换至前进挡或者倒车挡、制动踏板主缸压力大于预设主缸压力阈值、且车辆的当前车速小于预设车速阈值。
23.第二方面,本发明实施例提供了一种控制装置,应用于车辆的整车控制器,所述装置包括:
24.大气压力值接收模块,用于在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;
25.电池电量值接收模块,用于在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;
26.禁止请求负扭矩信号生成模块,用于在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至所述发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电。
27.可选地,所述装置还包括:
28.泵轮端转速接收模块,用于接收所述发动机发送的泵轮端转速;
29.涡轮端转速接收模块,用于接收所述车辆的变速箱控制器发送的涡轮端转速;
30.第一允许请求负扭矩信号生成模块,用于在所述泵轮端转速处于预设泵轮端转速范围内,且所述涡轮端转速处于预设涡轮端转速范围内的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电;
31.换挡时间监测模块,用于在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,监测所述车辆的换挡时间;
32.换挡失败信号生成模块,用于在所述换挡时间大于预设换挡时间阈值的情况下,生成换挡失败信号。
33.可选地,所述装置还包括:
34.第三允许请求负扭矩信号生成模块,用于在所述大气压力值大于或者等于所述大气压力阈值的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
35.第三方面,本发明实施例提供了一种车辆,包括第二方面任一所述的控制装置。
36.相对于现有技术,本发明实施例具有如下优点:
37.本发明实施例提供的控制方法,整车控制器可以在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,可以确定车辆在处于高原工况,接收所述车辆的电池控制器发送的电池电量值;在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电,本发明可以使得车辆在处于高原工况下,整车控制器可以不再需要通过发动机带动发电机对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要带动发电机对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以顺利由p挡或n挡切换到d挡或r挡,提高了车辆的稳定性。
附图说明
38.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
39.图1示出了本发明实施例一提供的一种控制方法的步骤流程图;
40.图2示出了本发明实施例二提供的一种控制方法的步骤流程图;
41.图3示出了本发明实施例提供的一种高原静止工况下车辆换挡的流程示意图;
42.图4示出了本发明实施例三提供的一种控制装置的结构示意图。
具体实施方式
43.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
44.下面将参考附图并结合实施例来详细说明本发明。
45.参照图1,示出了本发明实施例一提供的一种控制方法的步骤流程图,该控制方法可以应用于车辆的整车控制器。
46.如图1所示,该控制方法具体可以包括如下步骤:
47.步骤101:在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息。
48.其中,静止换挡条件包括:变速箱控制器(transmission control unit,tcu)检测车辆当前挡杆位置,如果挡杆位置由p挡或者n挡切换至d挡或者r挡,且整车控制器(vehicle control unit,vcu)检测的制动踏板主缸压力大于预设主缸压力阈值,电子稳定系统(electronic stability program,esp)检测的车辆的当前车速小于预设车速阈值。在同时满足上述条件时,可以确定车辆满足静止换挡条件,此时,车辆的静止换挡标志位为开启位,则可以通过发动机检测大气压力值,也可以通过定位模块获取车辆当前位置对应的大气压力值,并将大气压力值发送至vcu。
49.其中,预设主缸压力阈值可以是3百帕(bar),本技术实施例对其具体数值不作限定,可以根据实际应用场景去标定调整。
50.预设车速阈值可以是2千米/小时(km/h),本技术实施例对其具体数值不作限定,
可以根据实际应用场景去标定调整。
51.其中,定位模块可以包括全球定位系统(global positioning system,gps),可以通过gps实时获取车辆当前位置,并获取当前位置所对应的大气压力值。
52.其中,发动机内包括发动机大气压力传感器,发动机大气压力传感器可以检测大气压力值,并将该大气压力值发送至vcu。
53.在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息之后,执行步骤102。
54.步骤102:在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值。
55.预设大气压力阈值指的是大气压力值的临界值,小于该阈值表明车辆处于高原工况,大于或等于该阈值表明车辆处于常规工况。
56.定位模块可以包括全球定位系统(global positioning system,gps),可以通过gps实时获取车辆当前位置,在车辆位置当前处于高原位置时,显示车辆处于高原工况。
57.vcu在接收到发动机发送的大气压力值,在大气压力值小于预设大气压力阈值时,或者在接收到定位信息显示车辆处于高原工况后,以确定车辆处于高原工况,此时通过电池控制器(battery management system,bms)检测电池电量值,该电池电量值指的是48v电池包电量,并将该电池电量值发送至vcu。
58.其中,预设大气压力阈值可以是0.7bar,本技术实施例对其具体数值不作限定,可以根据实际应用场景去标定调整。
59.在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值之后,执行步骤103。
60.步骤103:在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电。
61.发电机可以是皮带驱动启动发电机(belt driven starter generator,bsg)。
62.预设电池电量阈值指的是电池电量值的临界值,大于或等于该临界值表明车辆电量足够,电池可以为bsg进行供电并对外输出扭矩,bsg可以对发动机进行助力,辅助发动机维持自身的转速。小于该临界值则表明,车辆电量不足够。
63.其中,预设电池电量阈值可以是30%,本技术实施例对其具体数据不作限定,可以根据实际应用场景去标定调整。
64.在电池电量值小于预设电池电量阈值时,表明车辆电池电量值不够,此时生成禁止电池控制器请求负扭矩信号,并发送至皮带驱动启动发电机,使得皮带驱动启动发电机禁止对低压负载进行供电,而是由蓄电池对低压负载进行供电。使得车辆在处于高原工况下,vcu可以不再需要控制发动机带动bsg对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要控制发动机带动bsg对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以由p挡或n挡切换到d挡或r挡。
65.本发明实施例提供的控制方法,整车控制器可以在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;在所述电池电量值小于预设电池电
量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电,本发明可以使得车辆在处于高原工况下,整车控制器可以不再需要控制发动机带动发电机对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要带动发电机对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以顺利由p挡或n挡切换到d挡或r挡,提高了车辆的稳定性。
66.参照图2,示出了本发明实施例二提供的一种控制方法的步骤流程图,该控制方法可以应用于车辆的整车控制器。
67.如图2所示,该控制方法具体可以包括如下步骤:
68.步骤201:在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息。
69.其中,静止换挡条件包括:变速箱控制器(transmission control unit,tcu)检测车辆当前挡杆位置,如果挡杆位置由p挡或者n挡切换至d挡或者r挡,且整车控制器(vehicle control unit,vcu)检测的制动踏板主缸压力大于预设主缸压力阈值,电子稳定系统(electronic stability program,esp)检测的车辆的当前车速小于预设车速阈值。在同时满足上述条件时,可以确定车辆满足静止换挡条件,此时,车辆的静止换挡标志位为开启位,则可以通过发动机检测大气压力值,也可以通过定位模块获取车辆当前位置对应的大气压力值,并将大气压力值发送至vcu。
70.其中,预设主缸压力阈值可以是3百帕(bar),本技术实施例对其具体数值不作限定,可以根据实际应用场景去标定调整。
71.预设车速阈值可以是2千米/小时(km/h),本技术实施例对其具体数值不作限定,可以根据实际应用场景去标定调整。
72.其中,定位模块可以包括全球定位系统(global positioning system,gps),可以通过gps实时获取车辆当前位置,并获取当前位置所对应的大气压力值。
73.其中,发动机内包括发动机大气压力传感器,发动机大气压力传感器可以检测大气压力值,并将该大气压力值发送至vcu。
74.在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息之后,执行步骤202或步骤203。
75.步骤202:在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值。
76.预设大气压力阈值指的是大气压力值的临界值,小于该阈值表明车辆处于高原工况,大于或等于该阈值表明车辆处于常规工况。
77.vcu在接收到发动机发送的大气压力值,在大气压力值小于预设大气压力阈值时,或者在接收到定位信息显示车辆处于高原工况后,可以确定车辆处于高原工况,此时通过电池控制器(battery management system,bms)检测电池电量值,该电池电量值指的是48v电池包电量,并将该电池电量值发送至vcu。
78.其中,预设大气压力阈值可以是0.7bar,本技术实施例对其具体数值不作限定,可以根据实际应用场景去标定调整。
79.在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值之后,执行步骤204。
80.步骤203:在所述大气压力值大于或者等于所述大气压力阈值的情况下,生成允许请求负扭矩信号并发送至发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
81.预设大气压力阈值指的是大气压力值的临界值,小于该阈值表明车辆处于高原工况,大于或等于该阈值表明车辆处于常规工况。
82.vcu在接收到发动机发送的大气压力值,在大气压力值大于或者等于预设大气压力阈值时,或者在接收到定位信息显示车辆不处于高原工况后,可以确定车辆处于常规工况,此时通vcu生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
83.步骤204:在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至所述发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电。
84.预设电池电量阈值指的是电池电量值的临界值,大于或等于该临界值表明车辆电量足够,电池可以为bsg进行供电并对外输出扭矩,bsg可以对发动机进行助力,可以对发动机进行助力,辅助发动机维持自身的转速。小于该临界值则表明,车辆电量不足够。
85.其中,预设电池电量阈值可以是30%,本技术实施例对其具体数据不作限定,可以根据实际应用场景去标定调整。
86.在电池电量值小于预设电池电量阈值时,表明车辆电池电量值不够,此时生成禁止电池控制器请求负扭矩信号,并发送至皮带驱动启动发电机,使得皮带驱动启动发电机禁止对低压负载进行供电,而是由蓄电池对低压负载进行供电。使得车辆在处于高原工况下,vcu可以不再需要控制发动机带动bsg对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要控制发动机带动bsg对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以由p挡或n挡切换到d挡或r挡。
87.在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至所述发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电之后,执行步骤205。
88.步骤205:接收所述发动机发送的泵轮端转速;接收所述车辆的变速箱控制器发送的涡轮端转速。
89.发动机可以检测车辆的泵轮端转速,并将该泵轮端转速发送至vcu。tcu可以检测车辆的涡轮端转速,并将该涡轮端转速发送至vcu。
90.在接收所述发动机发送的泵轮端转速;接收所述车辆的变速箱控制器发送的涡轮端转速后,执行步骤206或执行步骤207。
91.步骤206:在所述泵轮端转速处于预设泵轮端转速范围内,且所述涡轮端转速处于预设涡轮端转速范围内的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
92.预设泵轮端转速范围指的是泵轮端转速平稳时对应的转速范围,预设涡轮端转速范围指的是涡轮端转速平稳时对应的转速范围,本技术实施例对上述两个转速范围的具体数值不作限定,可以根据实际应用场景去标定调整。
93.在所述泵轮端转速处于预设泵轮端转速范围内,且所述涡轮端转速处于预设涡轮
端转速范围内的情况下,说明换挡成功,此时vcu可以生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
94.步骤207:在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,监测所述车辆的换挡时间。
95.在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,vcu可以获取车辆的换挡时间。
96.在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,监测所述车辆的换挡时间之后,执行步骤208或执行步骤209。
97.步骤208:在所述换挡时间大于预设换挡时间阈值的情况下,生成换挡失败信号。
98.预设换挡时间阈值指的是换挡时间的临界值,大于该临界值说明车辆换挡失败,小于或者等于该临界值,说明换挡成功。
99.预设换挡时间阈值可以是10秒,本技术实施例对此不作具体限定,可以根据实际应用场景做标定调整。
100.在换挡时间大于预设换挡时间阈值的情况下,vcu可以生成换挡失败信号。
101.步骤209:在所述换挡时间小于或者等于所述预设换挡时间阈值的情况下,生成所述允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
102.预设换挡时间阈值指的是换挡时间的临界值,大于该临界值说明车辆换挡失败,小于或者等于该临界值,说明换挡成功。
103.在所述换挡时间小于或者等于所述预设换挡时间阈值的情况下,vcu可以生成所述允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电,以及为电池包进行充电。
104.示例的,图3示出了本技术实施例提供的一种高原静止工况下车辆换挡的流程示意图,如图3所示,tcu可以检测当前档位,在检测到挡位由p挡或者n挡切换至d挡或者r挡,esp检测到车速小于2km/h,且vcu检测制定踏板主缸压力小于3bar的情况下,车辆静止换挡标志位为1,也即是车辆的静止换挡标志为为开启位,vcu接收并判断发动机发送的大气压力值,在大气压力值小于0.7bar的情况下,vcu接收并判断动力电池的电池电量值,在大气压力值大于或者等于0.7bar的情况下,采用常规工况换挡策略,vcu生成允许bsg请求负扭矩信号,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电,在电池电量值小于30%时,vcu生成禁止bsg请求负扭矩信号,发动机通过液力变矩器带动变速器输出,发动机获取泵轮端转速,涡轮端获取泵轮端转速,并且在该两个转速处于平稳状态时,vcu生成允许bsg请求负扭矩信号,在该两个转速处于不平稳状态时,vcu获取车辆换挡时间,在换挡时间小于或者等于10s时,vcu生成允许bsg请求负扭矩信号,在换挡时间大于10s时,生成换挡失败信号,在电池电量大于或者等于30%时,车辆起步时bsg对发动机进行助力。
105.本发明实施例提供的控制方法,整车控制器可以在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;在所述电池电量值小于预设电池电
量阈值的情况下,生成禁止请求负扭矩信号并发送至所述发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电,本发明可以使得车辆在处于高原工况下,整车控制器可以不再需要通过发动机带动发电机对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要带动发电机对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以顺利由p挡或n挡切换到d挡或r挡,提高了车辆的稳定性。
106.参照图4,示出了本发明实施例三提供的一种控制装置的结构示意图,该控制装置应用于车辆的整车控制器。
107.如图4所示,该控制装置300具体可以包括:
108.大气压力值接收模块301,用于在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;
109.电池电量值接收模块302,用于在所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;
110.禁止请求负扭矩信号生成模块303,用于在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电。
111.可选地,所述装置还包括:
112.泵轮端转速接收模块,用于接收所述发动机发送的泵轮端转速;
113.涡轮端转速接收模块,用于接收所述车辆的变速箱控制器发送的涡轮端转速;
114.第一允许请求负扭矩信号生成模块,用于在所述泵轮端转速处于预设泵轮端转速范围内,且所述涡轮端转速处于预设涡轮端转速范围内的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
115.可选地,所述装置还包括:
116.换挡时间监测模块,用于在所述泵轮端转速不处于所述预设泵轮端转速范围,且所述涡轮端转速不处于所述预设涡轮端转速范围的情况下,监测所述车辆的换挡时间;
117.换挡失败信号生成模块,用于在所述换挡时间大于预设换挡时间阈值的情况下,生成换挡失败信号。
118.可选地,所述装置还包括:
119.第二允许请求负扭矩信号生成模块,用于在所述换挡时间小于或者等于所述预设换挡时间阈值的情况下,生成所述允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
120.可选地,所述装置还包括:
121.第三允许请求负扭矩信号生成模块,用于在所述大气压力值大于或者等于所述大气压力阈值的情况下,生成允许请求负扭矩信号并发送至所述发电机,以供所述发电机开始请求负扭矩,从而向所述低压负载进行供电。
122.本发明实施例中的控制装置的具体实现方式在方法侧已经详细介绍,故在此不再做赘述。
123.本发明实施例提供的控制装置,整车控制器可以在检测到所述车辆满足静止换挡条件的情况下,接收所述车辆的发动机发送的大气压力值或定位模块发送的定位信息;在
所述大气压力值小于预设大气压力阈值,或所述定位信息显示所述车辆处于高原工况的情况下,接收所述车辆的电池控制器发送的电池电量值;在所述电池电量值小于预设电池电量阈值的情况下,生成禁止请求负扭矩信号并发送至发电机,以供所述发电机停止请求负扭矩,从而停止向低压负载进行供电,本发明可以使得车辆在处于高原工况下,整车控制器可以不再需要通过发动机带动发电机对低压负载进行供电,避免了车辆发动机在维持自身目标转速的同时,还需要带动发电机对低压负载进行供电而导致的车辆熄火的情况,使得在高原静止工况,车辆可以顺利由p挡或n挡切换到d挡或r挡,提高了车辆的稳定性。
124.本发明实施例还提供了一种车辆,包括上述的控制装置。
125.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
126.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
127.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1