控制车辆自动驾驶的装置和方法、具有该装置的系统与流程
控制车辆自动驾驶的装置和方法、具有该装置的系统
1.相关申请的交叉引用
2.本技术要求2020年4月6日提交的韩国专利申请no.10-2020-0041711的优先权及权益,该申请的全部内容以引用的方式并入本文。
技术领域
3.本发明涉及一种用于控制车辆的自动驾驶的装置和方法、具有该装置的系统。
背景技术:
4.本部分中的陈述仅提供涉及本发明的背景信息,并不会构成现有技术。
5.随着汽车工业的发展,自动驾驶系统和部分地允许自动驾驶的驾驶辅助系统(下文中,为了便于说明,将自动驾驶和驾驶辅助统称为“自动驾驶”)已经得到开发。
6.自动驾驶系统可以提供各种功能,例如,保持设定速度,保持车辆之间的距离,保持车道和变换车道。自动驾驶系统可以通过利用各种装置来执行自动驾驶,例如,用于感测车辆外部环境的传感器、用于感测有关车辆信息的传感器、全球定位系统(gps)、详细地图、用于检测用户状态的系统、转向致动器、加速/减速致动器、通信电路以及控制电路(例如,电子控制单元(ecu))。
7.这种自动驾驶系统在运行期间根据车辆和行驶环境通过以下方式控制自动驾驶车辆,例如,控制权限向驾驶员转移、最小风险策略和应急策略。在这种情况下,根据最小风险策略和应急策略,在车道上执行车辆的减速或停车控制。但是,我们发现,当出现问题情况时,由于车辆正在行驶的道路状况不一致,当仅支持将车辆停在车道上的功能时,可能会导致更危险的情况,例如,与后车发生碰撞。
技术实现要素:
8.本发明提供一种用于控制车辆的自动驾驶的装置和方法、具有该装置的系统,所述装置能够根据自动驾驶车辆的行驶情况和当前行驶车道的位置来控制车辆的自动驾驶,以执行向用户的控制权限转移、最小风险策略或应急策略中的至少一种。
9.根据本发明的一方面,一种用于控制自动驾驶的装置可以包括:处理器,其确定行驶情况和车道位置,并且根据确定结果来确定车辆的自动驾驶控制策略;以及非易失性存储介质,其存储由处理器计算出的结果和由处理器执行的算法。在启动自动驾驶控制策略的最小风险策略之后,所述处理器可以确定车辆正在行驶的道路的每个车道的安全性,以控制车辆在代表最高安全性的车道上停车。
10.根据一个实施方案,自动驾驶控制策略可以包括应急策略、最小风险策略或控制权限转移中的至少一种。
11.根据另一个实施方案,所述处理器可以计算对于每个车道本车与运动物体或静止物体的相对距离和相对速度,并且基于相对距离和相对速度来计算到达预计本车与运动物体或静止物体之间发生碰撞的时间点的碰撞时间(time to collision,ttc)。
12.在一个实施方案中,所述处理器可以确定出随着碰撞时间则增加安全性更高。
13.在本发明的一些实施方案中,所述处理器可以将安全性权重施加到本车道,或道路的至少一个车道的路肩。
14.在本发明的一些实施方案中,当路肩的安全性确定为处于最高水平时,所述处理器可以确定在道路的至少一个车道的路肩上是否存在静止物体。
15.在本发明的一些实施方案中,所述处理器可以确定路肩上是否存在用于使车辆停车的空间,并且当路肩上存在用于使车辆停车的空间时,在所述空间中执行停车控制。
16.在本发明的一些实施方案,当前方存在突然停车的车辆或由于事故而期望紧急停车时,所述处理器可以执行控制操作,以执行应急策略。
17.在本发明的一些实施方案中,当执行应急策略时,所述处理器可以执行控制操作,以在车辆正在行驶的车道上执行紧急停车。
18.在本发明的一些实施方案中,当难以执行自动驾驶控制功能的状态下驾驶员未能接收到控制权限时,所述处理器可以执行最小风险策略。
19.在本发明的一些实施方案中,在最小风险策略中,当代表最高安全性的车道不是本车道时,所述处理器可以确定是否允许向代表最高安全性的车道的车道变换。
20.在本发明的一些实施方案中,当允许车道变换时,所述处理器可以执行向代表最高安全性的车道的车道变换,并且在代表最高安全性的车道上执行停车控制。
21.在本发明的一些实施方案中,所述处理器可以利用ttc根据特定的参考时间来计算相关车道的危险概率、相关车道的占用概率和相关车道的安全概率,并且利用危险概率、占用概率和安全概率中的最高概率来确定相关车道的安全性。
22.在本发明的一些实施方案中,所述处理器可以利用ttc根据特定的参考时间来计算相关车道上的每个物体的纵向危险概率和相关车道上的每个物体的车道位置概率,并且利用物体的纵向危险概率和物体的车道位置概率来确定每个车道的安全性。
23.在本发明的一些实施方案中,在完全执行了车辆的停车控制之后,所述处理器可以确定在特定的时间内车辆是否完全停车,并且当车辆没有完全停车时,向驾驶员请求控制权限转移。
24.在本发明的一些实施方案中,当车辆超出设计用于特定的自动驾驶控制功能的操作的区域时,所述处理器可以确定出期望向驾驶员请求控制权限转移。
25.根据本发明的另一方面,一种车辆系统可以包括:感测装置,其感测自动驾驶控制的过程中的行驶情况和车道位置;以及自动驾驶控制装置,其根据行驶情况和车道位置来确定车辆的自动驾驶控制策略。在启动自动驾驶控制策略的最小风险策略之后,所述自动驾驶控制装置可以确定车辆正在行驶的道路的每个车道的安全性,以控制车辆在代表最高安全性的车道上停车。
26.根据本发明的另一方面,一种用于控制自动驾驶的方法可以包括:确定行驶情况和车道位置;基于确定结果来确定车辆的自动驾驶控制策略;在启动自动驾驶控制策略的最小风险策略之后,确定车辆正在行驶的道路的每个车道的安全性;控制车辆在代表最高安全性的车道上停车。
27.在本发明的一些实施方案中,确定车道的安全性可以包括:对于每个车道计算本车与运动物体或静止物体的相对距离和相对速度;基于相对距离和相对速度来计算到达预
计本车与运动物体或静止物体之间发生碰撞的点所花费的碰撞时间(ttc)。
28.在本发明的一些实施方案中,所述方法可以进一步包括:利用ttc根据特定的参考时间来计算相关车道的危险概率、相关车道的占用概率和相关车道的安全概率;并且利用危险概率、占用概率和安全概率中的最高概率来确定相关车道的安全性。
29.通过本文提供的说明,其它应用领域将变得明显。应当理解,本描述和具体实施例仅是旨在用于说明的目的,并非旨在限制本发明的保护范围。
附图说明
30.为了可以很好地理解本发明,现在参考所附附图,以给出的示例的方式来描述其各个实施方案,其中:
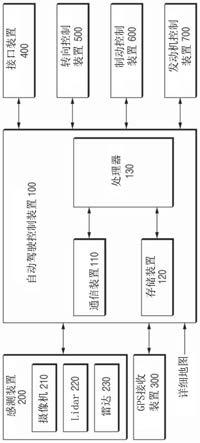
31.图1为示出根据本发明的一个实施方案的包括用于控制自动驾驶的装置的车辆系统的配置的框图;
32.图2为示出根据本发明的另一个实施方案的用于控制自动驾驶的方法的流程图;
33.图3为示出根据本发明的另一个实施方案的用于说明在自动驾驶期间确定每个车道的安全性的过程的屏幕的示意图;
34.图4示出了根据本发明的一个实施方案的计算系统。
35.本文描述的附图仅用于说明的目的,而并不旨在以任何方式限制本发明的范围。
具体实施方式
36.下面的说明在本质上仅仅是示例性的,并非旨在限制本发明、应用或用途。应当理解,在整个附图中,相应的附图标记表示相同或相应的部件和特征。
37.下文中,将参考示例性附图详细描述本发明的部分实施方案。此外,在描述本发明的示例性实施方案时,将排除对公知的特征或功能的详细描述,以免不必要地模糊本发明的主旨。
38.在根据本发明的一个实施方案的组件的以下描述中,可以利用术语“第一”、“第二”、“a”、“b”、“(a)”和“(b)”。这些术语仅用于区分相关组件与其他组件,并且相关组件的性质、顺序或次序不受这些术语的限制。除非另外定义,否则本文中使用的包括技术或科学术语的所有术语具有与本发明所属领域的技术人员通常理解的含义相同的含义。如在通用词典中定义的这种术语应当被解释为具有与相关领域相关的上下文含义相同的含义,除非在本技术中明确定义,否则不应当被解释为具有理想或过于正式的含义。
39.本发明公开了这样一种提高车辆安全性的技术:在包括至少一个车道的道路上,根据自动驾驶车辆正在行驶的车道的位置(车道位置)和自动驾驶车辆的行驶情况来安全地控制车辆,从而提高车辆的安全性。
40.下文中,将参考附图1至4对本发明的示例性实施方案进行详细描述。
41.图1为示出根据本发明的一个实施方案的车辆系统的组件的框图,所述车辆系统包括用于控制自动驾驶的装置(下文中,称为“自动驾驶控制装置”)。
42.参考图1,自动驾驶控制装置100可以在车辆内部实现。在这种情况下,自动驾驶控制装置100可以与车辆的内部控制单元一体地形成,或者可以与车辆的内部控制单元分开地实现,以通过单独的连接器与车辆的内部控制单元连接。
43.车辆系统可以包括:自动驾驶控制装置100、感测装置200、全球定位系统(gps)接收装置300、接口装置400、转向控制装置500、制动控制装置600以及发动机控制装置700。
44.自动驾驶控制装置100可以从感测装置200接收关于车道和外部物体的信息,可以从gps接收装置300接收关于车辆位置的信息,并且可以基于详细地图来获得关于道路形状的信息。在这种情况下,可以从外部或车辆内部的详细地图数据库接收详细地图。
45.自动驾驶控制装置100可以包括:通信装置110、存储装置120以及处理器130。
46.通信装置110(其是利用各种电子电路实现为通过无线或有线连接发送或接收信号的硬件装置)可以通过车内网络通信技术或无线互联网接入或短距离通信技术与车辆的外部服务器、基础设施和其他车辆进行v2i通信。在这种情况下,车辆网络通信技术可以包括:控制器局域网(can)通信技术、本地互连网络(lin)通信技术、flexray通信技术,并且可以通过上述通信技术来执行车内通信。无线互联网技术可以包括:无线lan(wlan)、无线宽带(wibro)、wi-fi、全球微波接入互操作性(world interoperability for microwave access,wimax)。短距离通信技术可以包括:蓝牙、无线个域网(zigbee)、超宽带(uwb)、射频识别(rfid)或红外数据协会(irda)。
47.例如,通信装置110可以向处理器130发送从感测装置200和gps接收装置200接收到的数据。
48.存储装置120可以存储感测装置200的感测结果以及实现自动驾驶控制装置100操作所需的算法的数据或指令集。
49.例如,存储装置120可以存储处理器130计算出的针对每个车道的危险概率、占用概率、安全概率和碰撞时间(time to collision,ttc)的计算结果。另外,存储装置120可以存储由感测装置200感测到的关于每个车道上的物体的信息,例如,相对于物体的相对速度或相对距离。存储装置120可以利用以下存储器中的至少一种存储介质来实现:闪存型、硬盘型、微型、卡型(例如,安全数字(sd)卡或极限数字卡)的存储器,随机存取存储器(ram),静态ram(sram),只读存储器(rom),可编程rom(prom),电可擦除可编程rom(eeprom),磁性ram(mram),磁盘型存储器或光盘型存储器。
50.处理器130可以处理在自动驾驶控制装置100的组件之间发送的信号。处理器130可以与通信装置110和存储装置120等电连接,可以电控制每个组件,并且可以是执行软件指令的电路。因此,处理器130可以执行如下所述的各种数据处理和计算。例如,处理器130可以是电子控制单元(ecu)、微控制器单元(mcu)或安装在车辆中的另一个下级控制器。
51.处理器130可以确定行驶情况和车道位置,并且可以根据确定结果来确定车辆的自动驾驶控制策略。在这种情况下,自动驾驶控制策略可以包括每个车道的最小风险策略(minimum risk maneuver,mrm)、应急策略(emergency maneuver,em)和控制权限转移。
52.当前方存在突然停车的车辆(例如,前方车辆)或由于事故而需要紧急停车时,处理器130可以执行控制操作以执行应急策略。在这种情况下,在执行应急策略时,处理器130可以执行控制操作,以在车辆正在行驶的本车车道上执行应急停车,而不执行车道变换。
53.当车辆超出设计用于特定的自动驾驶控制功能的操作的区域时,处理器130可以确定出期望请求将控制权限转移给驾驶员。
54.另外,当难以执行自动驾驶控制功能时,处理器130请求控制权限转移给驾驶员。然而,当驾驶员在难以执行自动驾驶控制功能的状态下未能接收到控制权限时,处理器130
可以执行最小风险策略。
55.在开始自动驾驶控制策略的最小风险策略之后,处理器130可以确定车辆正在行驶的道路的每个车道的安全性,并且控制车辆在代表最高安全性的车道上停车。
56.在执行最小风险策略时,处理器130可以对每个车道计算本车相对于运动物体或静止物体的相对距离和相对速度,并且可以基于该相对距离和相对速度来计算到达预计本车与运动物体或静止物体之间发生碰撞的点所花费的ttc。在这种情况下,可以通过以下等式1计算ttc。
57.等式1
[0058][0059]
在这种情况下,表示对方车辆在弯道上的曲线坐标系上的纵向距离,并且表示对方车辆在弯道上的速度。另外,sego是本车的纵向距离,并且vego是本车的速度。纵向距离和速度可以代表车辆沿着车道移动的纵向运动。
[0060]
在这种情况下,处理器130可以确定出由于ttc的增加而安全性较高。
[0061]
处理器130可以利用ttc来计算对于每个特定的参考时间的相关车道的危险概率、相关车道的占用概率以及相关车道的安全概率(自由概率),并且可以利用危险概率、占用概率和安全概率中的最高概率来确定相关车道的安全性。
[0062]
此外,处理器130可以利用ttc计算相对于每个特定参考时间的相关车道上的每个物体的纵向危险概率和每个物体的车道位置概率,并且可以利用每个物体的纵向危险概率和每个物体的车道位置概率来确定每个车道的安全性。稍后将参考图3来详细地描述每个车道的安全性的确定。
[0063]
在确定每个车道的安全性的情况下,当对于每个车道确定安全性时,处理器130可以给本车道或者道路的至少一个车道的路肩分配安全性权重。例如,在本车目前在包括第一车道、第二车道和第三车道的道路的第二车道上行驶的情况下,当第一车道的安全性为50、第二车道的安全性为60、第三车道的安全性为55时,并且当本车道的权重为7且路肩的权重为9时,第一车道的安全性变为50,第二车道的安全性变为67,第三车道的安全性变为64,因此可以对第二车道执行停车控制。
[0064]
当道路的至少一个车道的路肩表现出最高安全性时,处理器130可以确定路肩上是否存在静止物体。
[0065]
处理器130可以确定路肩上是否存在用于使车辆停车的空间,并且当路肩上存在用于使车辆停车的空间时,可以执行进入该空间的停车控制。
[0066]
在最小风险策略中,当本车道不是代表最高安全性的车道时,处理器130确定是否允许车道变换到代表最高安全性的车道。如果允许车道变换,则处理器130可以向代表最高安全性的车道执行车道变换,并且可以在代表最高安全性的车道上执行停车控制。
[0067]
处理器130可以确定在对车辆执行停车控制之后的特定时间内车辆是否完全停车,当车辆没有完全停车时,可以向驾驶员请求控制权限转移。
[0068]
感测装置200可以感测车辆的周围信息。例如,感测装置200可以感测关于位于车辆前方、后方或侧方的外部物体(例如,车辆和行人)的信息(例如,位置、速度和加速度)。另
外,感测装置200可以获得关于车辆当前行驶的车道(当前行驶的车道)的信息。例如,感测装置200可以感测车辆当前行驶的车道的位置、对于车道上的运动物体或静止物体的相对速度和相对距离,并且可以识别在路肩上的静止物体。
[0069]
为此,感测装置200可以包括摄像机210、激光雷达(lidar)220以及雷达230。
[0070]
gps接收装置300从全球定位系统(gps)接收gsp信息,以将gps信息提供给自动驾驶控制装置100。
[0071]
接口装置400可以包括输入装置和输出装置;所述输入装置用于从用户接收控制指令;所述输出装置用于输出车辆自动驾驶控制装置100的操作状态和操作结果。在这种情况下,输入装置可以包括键按钮,并且可以包括鼠标、操纵杆、飞梭旋钮、手写笔等。另外,输入装置可以包括在显示器上实现的软键。输出装置可以输出关于自动驾驶模式的信息或关于用于控制权限转移的请求的指导通知。输出装置可以包括显示器。例如,输出装置可以包括语音输出装置,例如,显示器和扬声器、或者振动电机。在这种情况下,显示器可以包括液晶显示器(lcd)、薄膜晶体管-液晶显示器(tft lcd)、有机发光二极管(oled)、柔性显示器、场发射显示器(fed)和三维显示器(3d显示器)中的至少一种。当显示器中包括诸如触摸膜、触摸片、触摸板等的触摸传感器产品时,显示器可以作为触摸屏工作,并且输入装置和输出装置可以实现为一体的形式。
[0072]
转向控制装置500可以配置为控制车辆的转向角,并且可以包括方向盘、与方向盘一起操作的致动器以及控制该致动器的控制器。
[0073]
制动控制装置600可以配置为控制车辆的制动,并且可以包括用于控制制动器的控制器。
[0074]
发动机控制装置700可以配置为控制车辆的发动机驱动,并且可以包括控制车辆的速度的控制器。
[0075]
如上所述,根据本发明,通过利用车辆的感测装置200和详细地图的数据可以确定自动驾驶车辆的行驶情况(车辆状态和行驶环境);通过利用详细地图、gps信息、车道信息和感测装置200的数据,可以获得关于车辆正在行驶的车道和道路的地形信息;并且可以利用关于自动驾驶车辆的行驶情况和车辆当前行驶的车道的信息来执行向驾驶员的控制权限转移、最小风险策略或应急策略中的一个,从而执行安全的自动驾驶控制。
[0076]
下文中,将参考图2详细地描述根据本发明的一个实施方案的用于控制车辆的自动驾驶的方法。图2为示出用于控制自动驾驶的方法的流程图。
[0077]
将假设图1的自动驾驶控制装置100执行图2的处理进行以下描述。另外,在参考图2进行的以下描述中,可以理解的是,描述为由装置执行的操作由自动驾驶控制装置100的处理器130控制。
[0078]
参考图2,自动驾驶控制装置100获得关于行驶情况的信息(s101)。在这种情况下,自动驾驶控制装置100可以利用诸如感测信息和详细地图的数据来确定行驶情况。
[0079]
在这种情况下,关于行驶情况的信息可以包括自动驾驶车辆的状态和道路的行驶环境。自动驾驶车辆的状态可以包括以下信息:车辆前方是否存在障碍物,与障碍物发生碰撞的可能性,或诸如与自动驾驶控制功能相关的传感装置的装置故障。道路的行驶环境可以包括行驶道路的类型,例如,关于行驶道路是否是专用于车辆的道路(即,用于自动驾驶操作的区域)的信息。
[0080]
自动驾驶控制装置100可以基于关于行驶情况的信息来确定必要的行驶策略。首先,自动驾驶控制装置100可以确定当前行驶情况是否需要应急策略(emergency maneuver,em)(s102)。换句话说,当在本车前方存在突然停车的车辆或发生意外事故而本车需要执行应急停车时,自动驾驶控制装置100可以确定出期望执行em。
[0081]
当需要执行应急策略时,自动驾驶控制装置100在车道上执行应急停车(s103)。
[0082]
此后,自动驾驶控制装置100确定车辆是否完全停车(s104)。当应急停车完全执行时,自动驾驶控制装置100终止应急策略,当应急停车没有完成时(即,当车辆保持行驶时),确定是否期望控制权限转移(s105)。在这种情况下,当预期偏离设计用于操作自动驾驶控制功能的区域(例如,车辆专用的道路)时,自动驾驶控制装置100可以确定出期望向驾驶员请求控制权限转移。
[0083]
此外,在s102,当当前行驶情况不需要应急策略时,自动驾驶控制装置100可以确定当前行驶情况是否需要最小风险策略(s108)。在这种情况下,当由于传感器的一部分的干扰或故障而难以完全执行全部的自动驾驶控制功能时,自动驾驶控制装置100可以确定出当前行驶情况需要最小风险策略,并且驾驶员无法接收控制权限转移。
[0084]
当期望最小风险策略时,自动驾驶控制装置100确定车辆当前行驶的车道,并且确定车辆正在行驶的道路(行驶道路)上的每个车道的安全性(s109)。
[0085]
在这种情况下,自动驾驶控制装置100可以通过结合详细地图、前部摄像机或环视监视器来确定车辆当前行驶的车道,并且可以通过结合详细地图和来自摄像机210、lidar 220和雷达230的信息来确定每个车道的安全性。具体地,自动驾驶控制装置100计算与每个车道上的运动物体或静止物体的相对距离和相对速度,并且可以计算出在不与每个车道上的运动物体或静止物体碰撞的情况下直到本车停车所花费的时间。在这种情况下,可以确定出随着在不与每个车道上的运动物体或静止物体碰撞的情况下直到本车停车的时间则增加安全性更高,权重可以施加到本车道或路肩,并且可以对代表更高安全性的车道执行最小风险策略。
[0086]
当存在可变车道时,自动驾驶控制装置100可以通过从周围车辆接收到的v2v通信信息来确定可变车道是否可用作路肩。
[0087]
另外,自动驾驶控制装置100可以确定路肩上的静止障碍物(例如,停止的车辆或护栏),并且可以确定是否存在用于使本车停车的空间,以确定安全性。
[0088]
因此,自动驾驶控制装置100判断路肩是否是具有最高安全性的车道(s110),当路肩不是具有最高安全性的车道时,执行车道上的停车控制(s112)。在这种情况下,当根据最小风险策略在车道上停车时,自动驾驶控制装置100可以在减速之后执行停车控制。
[0089]
此后,自动驾驶控制装置100确定车辆是否完全停车(s104)。当停车完全执行时,自动驾驶控制装置100终止应急策略,并且当停车没有完成时(即,车辆保持行驶时),确定是否期望控制权限转移(s105)。
[0090]
在s110,当具有最高安全性的车道是路肩时,自动驾驶控制装置100基于行驶情况的信息来确定是否允许向路肩的车道变换(s111)。当不允许车道变换时,自动驾驶控制装置100在车道上执行停车控制(s112)。当允许向路肩的车道变换时,自动驾驶控制装置100可以执行向路肩的车道变换并且在路肩上执行停车控制(s113)。在这种情况下,当向路肩变换车道之后使车辆停车时,自动驾驶控制装置100可以在利用前方或后方的运动物体或
静止物体的信息执行车道变换之后在空的空间中执行停止控制。
[0091]
此后,自动驾驶控制装置100确定车辆是否完全停车(s104)。当车辆完全停车时,自动驾驶控制装置100终止应急策略。当车辆没有完全停车时(即,当车辆保持行驶时),自动驾驶控制装置100可以确定是否期望控制权限转移并且可以执行以下过程(s105、s106和s107)。
[0092]
此外,当当前行驶情况不需要s102和s108中的应急策略和最小风险策略时,自动驾驶控制装置100可以确定当前行驶情况是否需要控制权限转移(td)(s105)。
[0093]
当需要控制权限转移时,自动驾驶控制装置100请求控制权限转移(s106),并且确定控制权限转移是否在特定时间内完成(s107)。
[0094]
当控制权限转移没有完成时,自动驾驶控制装置100可以再次确定是否期望最小风险策略(s108)。如上所述,可以通过重复s109至s113来执行以下过程。
[0095]
图3为示出根据本发明的一个实施方案的用于说明在自动驾驶期间确定每个车道的安全性的过程的屏幕的示意图。
[0096]
参考图3,自动驾驶控制装置100可以对每个车道计算本车与运动物体或静止物体的相对距离和相对速度,并且可以计算到达预计本车与运动物体或静止物体之间发生碰撞的点所花费的ttc,从而确定出随着停车时间增加而安全性更高。
[0097]
另外,自动驾驶控制装置100可以通过对本车道或路肩施加权重来确定安全性。当存在可变车道时,自动驾驶控制装置100可以基于通过v2x通信从周围车辆接收到的信息来确定可变车道是否被用作路肩,并且可以应用确定结果。另外,当基于感测信息确定出在路肩上存在静止物体时,自动驾驶控制装置100可以确定在路肩上是否存在用于使车辆停车的空间。
[0098]
自动驾驶控制装置100可以在计算每个车道的安全性之后通过向具有最高安全性的车道进行车道变换来执行控制操作,以执行最小风险策略。
[0099]
自动驾驶控制装置100可以计算每个车道上的每个物体的纵向风险概率,以计算每个车道的安全性。在这种情况下,自动驾驶控制装置100可以如等式1计算碰撞时间(ttc)(其为到达碰撞点所花费的时间),以计算每个物体的纵向危险概率。
[0100]
自动驾驶控制装置100可以利用本车与每个车道上的运动物体或静止物体的相对距离和相对速度来计算ttc,所述ttc是到达本车与每个车道上的运动物体或静止物体之间的碰撞点所花费的时间。
[0101]
表示车辆危险状态的“l”可以定义为([危险,占用,安全]=[d,o,f]),以将每个车道的危险表示为概率。
[0102]
因此,如下面的等式2,自动驾驶控制装置100可以利用ttc来计算每个车道的纵向危险概率纵向占用概率纵向安全概率
[0103]
换句话说,以下等式2可以通过对于“危险”、“占用”或“安全”中的每一个的似然函数来计算“l”的危险概率,“l”表示车辆的危险状态。
[0104]
等式2
[0105][0106][0107][0108]
在这种情况下,σt可以从轨迹-轨迹的融合结果的协方差矩阵中获得。为了简化似然函数利用反ttc值来代替ttc值,并且危险状态的阈值表示占用状态的阈值。
[0109]
例如,将[危险,占用,安全]=[d,o,f]的状态的参考时间(阈值)设置为[2秒,5秒,10秒],ttc是根据本车与对方车辆之间的当前的相对速度和相对距离计算得到的,并且将ttc代入等式2,从而计算出对于每种状态的概率。
[0110]
自动驾驶控制装置100可以计算每个物体的车道位置概率。
[0111]
换句话说,自动驾驶控制装置100必须识别出其上存在物体(障碍物)的车道,以确定每个车道的危险水平。因此,如以下等式3,自动驾驶控制装置100可以利用与车道位置相关联的曲线坐标系上的侧向数据来执行对于车道内的横向位置“h”的归一化横向位置(normalized lateral position,nlp)。
[0112]
等式3
[0113][0114]
在这种情况下,nlane表示车道的数量,wlane表示车道的宽度,并且nlp表示与车道的相对位置。考虑到物体与车道之间的不确定性,对于车道“m”的nlp的似然函数可以表示为以下等式4。
[0115]
等式4
[0116][0117]
在这种情况下,σl表示可以由摄像机提供的车道置信度中推导出的值,表示车道的归一化后的横向位置,并且m是车道的位置。另外,表示对于的概率值。
[0118]
此后,如以下等式5所示,自动驾驶控制装置100可以通过将在等式2中计算出的每个车道的纵向危险概率纵向占用概率和纵向安全概率与等式4中计算出的车道的横向位置概率值相乘来计算每个车道的安全性。
[0119]
等式5
[0120][0121][0122][0123]
因此,自动驾驶控制装置100可以通过如等式5中以[危险,占用,安全]计算车道的安全性,基于每个车道的危险概率占用概率和安全概率中的最高值来确定车道的安全性。例如,如图3所示,当第一车道的危险概率、占用概率和安全概率中的安全概率具有最高值时,自动驾驶控制装置100可以将第一车道的安全性确定为最高水平。另外,当第二车道的危险概率、占用概率和安全概率中的占用概率具有最高值时,自动驾驶控制装置100可以确定出第二车道的安全性处于中间水平。另外,当第三车道的危险概率、占用概率和安全概率中的危险概率具有最高值时,自动驾驶控制装置100可以确定出第三车道的安全性处于最低水平。
[0124]
另外,自动驾驶控制装置100可以通过将权重施加到本车道和路肩上来计算安全性。
[0125]
例如,当本车当前行驶在包括第一车道、第二车道、第三车道的道路的第二车道上时,当第一车道的安全性为65,第二车道的安全性为60,第三车道的安全性为58时,并且当将10的权重施加到第二车道(其为本车正在行驶的车道),将10的权重施加到作为路肩的第三车道时,第一车道的安全性变为65,第二车道的安全性变为70,第三车道的安全性变为60,可以将代表最高安全性的车道确定为第二车道(其为本车道)。
[0126]
如上所述,根据本发明,控制操作执行为通过确定每个行驶车道的安全性来确定行驶策略,因此车辆可以更加安全地远离危险情况。因此,自动驾驶控制装置100的安全性可以得到提高。
[0127]
图4为示出根据本发明的一个实施方案的计算设备的框图。
[0128]
参考图4,计算系统1000可以包括经由系统总线1200相互连接的至少一个处理器1100、存储器1300、用户界面输入装置1400、用户界面输出装置1500、存储装置1600和网络接口1700。
[0129]
处理器1100可以是用于处理存储在存储器1300或存储装置1600中的指令的中央处理单元(cpu)或半导体装置。存储器1300和存储装置1600中的每一个可以包括各种类型的易失性或非易失性存储介质。例如,存储器1300可以包括只读存储器(rom)和随机存取存储器(ram)。
[0130]
因此,结合本发明中公开的实施方案描述的方法或算法的操作可以直接由处理器1100执行的硬件模块、软件模块或其组合来实现。所述软件模块可以驻留在存储介质(即,
存储器1300或存储装置1600)上,例如,ram、闪存、rom、可擦除可编程rom(eprom)、电eprom(eeprom)、寄存器、硬盘、可移动磁盘或光盘rom(cd-rom)。
[0131]
示例性存储介质可以联接到处理器1100。处理器1100可以从存储介质读取信息并且可以将信息写入存储介质中。或者,存储介质可以与处理器1100集成在一起。处理器和存储介质可以驻留在专用集成电路(asic)中。asic可以驻留在用户终端中。或者,处理器和存储介质可以作为单独的用户终端的组件而驻留。
[0132]
根据本发明,根据自动驾驶车辆的行驶情况和当前行驶车道的位置,控制操作可以执行为执行向用户的控制权限转移、最小风险策略或应急策略中的至少一种。
[0133]
具体地,根据本发明,当在自动驾驶过程中执行停车控制时,根据车辆的行驶情况和车辆的当前行驶车道的位置,可以在代表较高安全性的车道上执行停车控制,从而增强了自动驾驶功能的可靠性。
[0134]
此外,可以提供通过本发明直接或间接理解的各种效果。
[0135]
在上文中,尽管已经参考示例性实施方案和附图描述了本发明,但是本发明并不限于此,本发明所属领域的技术人显然可以进行各种改变和修改,而不会脱离所附权利要求所要求保护的本发明的精神和范围。
[0136]
因此,本发明的实施方案不旨在限制本发明的技术精神,而是仅出于示例性目的而提供。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1