一种永磁同步增程器瞬态发电功率协调控制方法与流程
1.本发明涉及增程式电动汽车控制领域,尤其涉及一种永磁同步增程器瞬态发电功率协调控制方法,主要用于永磁同步增程器瞬态发电工况迁移过程中,防止功率超调现象的发生,以保证瞬态工况增程器发电工况点的平稳过渡。
背景技术:
2.在环境问题日益严峻、能源供应愈发紧张的背景下,汽车电动化程度越来越高已经成为了当下汽车工业发展的趋势。综合考虑当前的技术水平和产业布局,发展增程式电动汽车作为一种可实施性较强的技术路线受到了更加广泛的关注。通过合理的匹配和控制,增程式电动汽车的动力系统可以完全满足车辆正常行驶时的动力要求,同时获得优异的油耗和排放性能。
3.目前主流的增程器采用发动机和永磁同步电机直接耦合的结构,这样的增程器结构简单,控制方便。在增程器的外部请求功率切换时,增程器控制器可以将内部请求功率解耦成请求转速和请求扭矩的信号,按照控制模式的要求分别发给发动机或永磁同步电机。例如,在选定发动机扭矩-电机转速控制模式的情况下,增程器控制器会给电机控制器发送转速控制模式命令和目标转速命令,给发动机控制器发送扭矩控制模式命令和目标扭矩命令。通过这样的方法可以实现增程器的多工况点控制,尽可能地适应整车的稳态功率需求,但在瞬态功率控制方面也存在以下问题:
4.永磁同步增程器处于发电工况时需要适时调节发电工况点以满足整车动力和能量管理需求。以发动机扭矩-电机转速控制模式为例,在发电工况点迁移,功率需求变化导致目标扭矩和转速变化时,转速指令总是能正常快速响应,但是扭矩指令在快速响应的过程中可能出现电机输入扭矩与目标扭矩存在较大偏差的情况,进而造成功率超调较大这一结果。导致这一不良结果的原因主要有两方面:首先,因为发动机曲轴和电机转子存在转动惯量,扭矩传递过程存在惯性损失,这使得当发动机达到目标扭矩时,实际传递给电机的扭矩仍然存在偏差;另外,在大功率发电情况发电曲线中发动机扭矩本身变化不大的情况下,电机自身会调节扭矩以满足转速闭环需求,这样的扭矩调节方式加快了动态响应速度,但也容易导致过大的扭矩偏差。
5.鉴于上述分析,本发明设计和开发了一种永磁同步增程器瞬态发电功率协调控制方法,可以保证增程器发电工况点的平稳过渡,有效抑制功率超调的现象,这对于增程式电动汽车的发展具有重要意义。
技术实现要素:
6.本发明针对目前永磁同步增程器存在的瞬态功率控制方面的问题,提出了一种永磁同步增程器瞬态发电功率协调控制方法。该方法可以识别当前的增程器内部请求功率切换情况,根据需要调整电机控制模式,并引入目标扭矩补偿量信号,与原本的目标扭矩相加后发给发动机控制器,以实现对瞬态功率控制过程的修正。该方法可以有效抑制瞬态工况
下实际功率在调节初期出现功率超调的现象,最终达成更好的控制效果。
7.本发明的目的通过以下技术方案来实现:一种永磁同步增程器瞬态发电功率协调控制方法,该方法针对发动机扭矩-电机转速控制模式,用于永磁同步增程器的发电工况;具体步骤如下:
8.(1)永磁同步增程器中的增程器控制器在接收到整车控制器发送的外部请求功率命令之后,根据当前永磁同步增程器的工作状态通过前馈加反馈的方式得到内部请求功率,并解耦成请求转速和请求扭矩的信号。
9.(2)永磁同步增程器在发电工况点迁移的过程中实际转速和请求转速存在差值。通过增程器控制器比较请求转速和实际转速,判断增程器处于稳态工况还是瞬态工况:
10.设请求转速为n
req
,实际转速为n
re
,则请求转速和实际转速的转速差δn=n
req-n
re
;设定转速差阈值为δn
allow
,若转速差的绝对值|δn|<δn
allow
,则永磁同步增程器处于稳态工况,不需要针对发电工况点进行额外干预。此时增程器控制器给电机控制器发送转速控制模式命令和目标转速命令,给发动机控制器发送扭矩控制模式命令和目标扭矩命令;
11.若转速差的绝对值|δn|≥δn
allow
,则永磁同步增程器处于瞬态工况,需要针对发电工况点进行额外干预。
12.(3)增程器处于瞬态工况时,为了实现瞬态功率并保证发电工况点的平稳过渡,增程器控制器切换电机控制模式,给电机控制器发送扭矩控制模式命令,并将目标扭矩发送给电机控制器;增程器控制器计算目标扭矩补偿量δt,并将其和原本的目标扭矩t
cmd
相加后得到修正后的目标扭矩命令t
′
cmd
=t
cmd
+δt,和扭矩控制模式命令一起发给发动机控制器。目标扭矩补偿量δt是请求转速n
req
和实际转速nr
e
的差值δn与比例系数k的乘积,且当请求转速大于实际转速时,目标扭矩补偿量δt为正值;当请求转速小于实际转速时,目标扭矩补偿量δt为负值。
13.进一步地,转速差阈值为δn
allow
的大小由系统的控制需求决定,阈值越小,对瞬态工况的干预越强,发电工况点的过渡越平稳,但系统的动态响应速度变慢;阈值越大,对瞬态工况的干预越弱,系统的动态响应速度越快,但更容易出现功率超调的现象。
14.进一步地,增程器处于瞬态工况时,引入目标扭矩补偿量信号的目的是扩大扭矩差,使得电机不需要主动改变扭矩以加快转速响应,增程器转速和电机扭矩波动更加平稳,保证发电工况点的平稳过渡。
15.进一步地,执行步骤(3)的同时,步骤(2)中的增程器控制器比较请求转速和实际转速也在同步进行,请求转速和实际转速的差值小于设定的阈值时,增程器控制器会恢复发动机扭矩-电机转速的控制模式,目标扭矩补偿量信号也会立即失效。
16.进一步地,对于永磁同步增程器的发电工况,永磁同步增程器为发动机转速-电机扭矩控制模式时。增程器控制器在接收到整车控制器发送的外部请求功率命令之后,根据当前增程器的工作状态通过前馈加反馈的方式得到内部请求功率,并解耦成请求转速和请求扭矩的信号。在稳态工况下,增程器控制器给发动机控制器发送转速控制模式命令和目标转速命令,给电机控制器发送扭矩控制模式命令和目标扭矩命令。在瞬态工况下,增程器控制器切换发动机控制模式,给发动机控制器发送扭矩控制模式命令,并将目标扭矩发送给发动机控制器;增程器控制器计算目标扭矩补偿量δt,并将其和原本的目标扭矩t
cmd
相
加后得到修正后的目标扭矩命令t
′
cmd
=t
cmd
+δt,和扭矩控制模式命令一起发给电机控制器。其余控制逻辑,包括瞬态工况和稳态工况的判断方法、目标扭矩补偿量的计算过程,与选择发动机扭矩-电机转速控制模式时相同。
17.本发明的有益效果:
18.1.在永磁同步增程器处于发电工况时,通过切换电机控制模式、引入目标扭矩补偿量信号的方式对瞬态工况进行修正。所述方法充分利用目前市场上成熟的电机控制器产品兼容转速控制模式和扭矩控制模式的功能,控制逻辑简单易行,可操作性强,有效避免了输出功率切换时可能出现的调节初期输出功率超调的现象的发生,能够保证增程器发电工况点的平稳过渡;
19.2.用请求转速和实际转速的差值来判断增程器处于稳态工况还是瞬态工况,所述两种干预手段(切换电机控制模式、引入目标扭矩补偿量信号)实行与否取决于增程器处于稳态工况还是瞬态工况,而且目标扭矩补偿量的大小可以通过改变比例系数适时调节。所述方法在保证增程器功率动态响应速度较快的同时,兼顾了瞬态过程的平稳,系统适应性强,具备实际使用前景。
附图说明
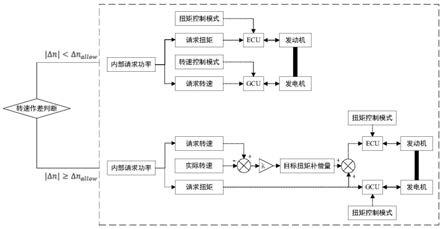
20.图1为永磁同步增程器发电工况控制逻辑;
21.图2为采用所述功率协调控制方法时的响应曲线;
22.图3为不采用所述功率协调控制方法时的响应曲线。
具体实施方式
23.以下结合附图和具体实施例对本发明作进一步说明。
24.本发明提出的一种永磁同步增程器瞬态发电功率协调控制方法主要用于永磁同步增程器的发电工况,并主要以发动机扭矩-电机转速控制模式为例进行说明。永磁同步增程器处于发电工况时的控制逻辑如图1所示。
25.(1)永磁同步增程器处于发电工况,以选择发动机扭矩-电机转速控制模式为例,增程器控制器在接收到整车控制器发送的外部请求功率命令之后,根据当前增程器的工作状态通过前馈加反馈的方式得到内部请求功率,并解耦成请求转速和请求扭矩的信号。
26.(2)由于当外部请求功率改变,增程器处于瞬态工况时,增程器在发电工况点迁移的过程中实际转速和请求转速可能存在超过设定阈值的差值。因此,为了判断增程器处于稳态工况还是瞬态工况,增程器控制器需要时刻比较请求转速和实际转速:
27.设请求转速为n
req
,实际转速为n
re
,则请求转速和实际转速的转速差δn=n
req-n
re
;设定的阈值为δn
allow
,阈值大小由系统的控制需求决定——阈值越小,对瞬态工况的干预越强,发电工况点的过渡越平稳,但系统的动态响应速度可能变慢;阈值越大,对瞬态工况的干预越弱,系统的动态响应速度越快,但更容易出现功率超调的现象。若转速差的绝对值|δn|<δn
allow
,则说明增程器处于稳态工况,不需要针对发电工况点进行额外干预。此时按例控制电机以转速控制模式运行,增程器控制器给电机控制器发送转速控制模式命令和目标转速命令,给发动机控制器发送扭矩控制模式命令和目标扭矩命令;
28.若转速差的绝对值|δn|≥δn
allow
,则说明增程器处于瞬态工况,需要针对发电工
况点进行额外干预,通过切换电机控制模式和引入目标扭矩补偿量信号进行干预。
29.(3)一旦增程器处于瞬态工况,为了实现瞬态功率并保证发电工况点的平稳过渡,增程器控制器切换电机控制模式,给电机控制器发送扭矩控制模式命令,并将目标扭矩发送给电机控制器;增程器控制器计算目标扭矩补偿量δt,并将其和原本的目标扭矩t
cmd
相加后得到修正后的目标扭矩命令t
′
cmd
=t
cmd
+δt,和扭矩控制模式命令一起发给发动机控制器。
30.(4)增程器处于瞬态工况时需要引入目标扭矩补偿量信号,引入该信号的目的是扩大扭矩差,使得电机不需要主动改变扭矩以加快转速响应。目标扭矩补偿量δt是请求转速n
req
和实际转速n
re
的差值δn与比例系数k的乘积,且当请求转速大于实际转速时,目标扭矩补偿量δt为正值;当请求转速小于实际转速时,目标扭矩补偿量δt为负值。
31.(5)如步骤(3)所述,增程器处于瞬态工况时,通过切换电机控制模式以及引入目标扭矩补偿量信号两种策略,扩大了发动机和电机的轴两端存在的扭矩差,使得增程器转速和电机扭矩波动更加平稳,保证发电工况点的平稳过渡。
32.(6)在执行步骤(3)、步骤(4)的过程中,步骤(2)的转速作差判断也在同步进行。一旦请求转速和实际转速的差值小于设定的阈值,增程器控制器又会恢复发动机扭矩-电机转速的控制模式,目标扭矩补偿量信号也会立即失效。
33.当增程器处于瞬态工况时,倘若采用所述的功率协调控制方法进行干预,整个过程的功率、扭矩和转速的波动情况如图2所示;倘若不采用所述的功率协调控制方法进行干预,那么就会导致瞬态工况下实际功率在调节初期出现功率超调的现象,整个过程的功率、扭矩和转速的波动情况如图3所示。可以看出,采用所述的功率协调控制方法能够有效减小增程器输出功率波动,避免了瞬态工况下实际功率在调节初期出现功率超调的现象的发生,保证了发电工况点的平稳过渡。
34.该方法也可用于永磁同步增程器的发电工况,并且选择发动机转速-电机扭矩控制模式时。此时增程器控制器在接收到整车控制器发送的外部请求功率命令之后,根据当前增程器的工作状态通过前馈加反馈的方式得到内部请求功率,并解耦成请求转速和请求扭矩的信号。在稳态工况下,增程器控制器给发动机控制器发送转速控制模式命令和目标转速命令,给电机控制器发送扭矩控制模式命令和目标扭矩命令。在瞬态工况下,增程器控制器切换发动机控制模式,给发动机控制器发送扭矩控制模式命令,并将目标扭矩发送给发动机控制器;增程器控制器计算目标扭矩补偿量δt,并将其和原本的目标扭矩t
cmd
相加后得到修正后的目标扭矩命令t
′
cmd
=t
cmd
+δt,和扭矩控制模式命令一起发给电机控制器。其余控制逻辑,包括瞬态工况和稳态工况的判断方法、目标扭矩补偿量的计算过程,与选择发动机扭矩-电机转速控制模式时相同。
35.上述实施例仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1