转弯系统及用于维持车辆转弯时的稳定性的方法与流程
1.本发明涉及剎车系统的技术领域,特别指用于车辆转弯时稳定的系统。
背景技术:
2.车辆在转弯时会产生离心力,当车速愈快,转弯时的离心力也就愈大,也就容易造成车辆重心偏移,而无法顺利过弯。因此,通常驾驶人在转弯时或过弯前会减低车速,以免受到离心力影响而发生事故。
3.相较于四个轮胎的汽车,其车身支撑稳,因此过弯稳定性高。而机车等两轮车,其车身不若汽车稳固,转弯时更容易因为离心力的作用而失去平衡,进而发生事故。
4.有鉴于此,提供一种在转弯时稳定车辆的转弯系统为本领域待解决的问题。
技术实现要素:
5.本发明要解决的技术问题为预防驾驶人在转弯时,因为剎车而造成轮胎抱死,导致车辆失去稳定性,进而发生事故。
6.有鉴于此,本发明提供一转弯系统,其配置为维持一车辆转弯时的稳定性。所述转弯系统包括:一第一传感器以及一电控单元(electronic control unit,ecu)。所述第一传感器配置为侦测所述车辆的一第一侧边与地面之间的一第一倾斜距离;所述电控单元与所述第一传感器耦合,并配置为:根据所述第一传感器侦测到的所述第一倾斜距离,获得一第二倾角;根据所述第二倾角判断所述车辆是否正在转弯;以及如果判断为该车辆正在转弯时,则进一步判断该车辆是否正在进行刹车,如果判断该车辆正在进行刹车,则控制施加于所述车辆的一轮胎上的一制动力fx。
7.在一实施例中,所述电控单元还配置为:获得所述制动力fx;计算一侧向力fy;根据所述制动力fx与所述侧向力fy计算的一合力f;以及,当所述合力f大于或等于一预定阈值,控制所述制动力fx。
8.在一实施例中,所述转弯系统还包括一第二传感器,所述第二传感器与所述电控单元耦合,并配置为侦测所述车辆的一第二侧边与地面之间的一第二倾斜距离。所述电控单元配置为进一步根据所述第一倾斜距离和所述第二传感器所测得的所述第二倾斜距离,获得所述第二倾角。
9.在一实施例中,所述转弯系统还包括一重力传感器,所述重力传感器与所述电控单元耦合,并配置为侦测所述车辆相对于一水平面之一第一倾角。所述电控单元配置为进一步根据所述第一倾角以及所述第二倾角,判断所述车辆是否正在转弯。
10.本发明提供一种用于维持一车辆转弯时稳定性的方法,其包括:侦测所述车辆的一第一悬吊机构的一第一悬挂行程:根据所述第一悬吊机构的所述第一悬挂行程,获得一第二倾角;根据所述第二倾角判断所述车辆是否正在转弯;以及如果判断为该车辆正在转弯,则进一步判断该车辆是否正在进行煞车,如果判断车辆正在进行煞车,则控制所述车辆的一轮胎上的一制动力fx。
11.在一实施例中,所述方法更包括:获得所述制动力fx;计算一侧向力fy;根据所述制动力fx与所述侧向力fy计算的一合力f;以及当所述合力(f)大于或等于一预定阈值,控制所述制动力fx。
12.在一实施例中,所述方法更包括:侦测所述车辆的一第二悬吊机构之一第二悬挂行程;以及进一步根据所述第二悬吊机构之所述第二悬挂行程以及所述第一悬吊机构之所述第一悬挂行程,获得所述第二倾角。
13.在一实施例中,所述方法更包括:侦测所述车辆相对于一水平面之一第一倾角;以及进一步根据所述第一倾角以及所述第二倾角来判断所述车辆是否正在转弯。
14.综上所述,本发明的转弯系统透过侦测车辆转弯时的状态(例如机车的倾斜角度)以及施加于轮胎上的制动力(剎车力),判断车辆在转弯时是否剎车力过大,进而控制剎车力,以防止车辆在转弯时因为轮胎抱死而造成车身不稳。
附图说明
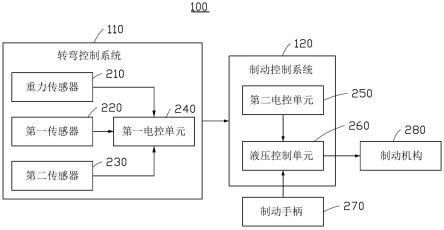
15.图1为依据本发明实施例所绘示的转弯系统的方块图。
16.图2为依据本发明第一实施例所绘示的转弯系统的方块图。
17.图3为依据本发明第一实施例所绘示的执行转弯系统的流程图。
18.图4为依据本发明第一实施例所绘示的车辆转弯时的轮胎与地面的示意图。
19.图5为依据本发明第二实施例所绘示的转弯系统的方块图。
20.图6为依据本发明第二实施例所绘示的执行转弯系统的流程图。
21.图7为依据本发明第二实施例所绘示的车辆转弯时的轮胎与地面的示意图。
22.图8为依据本发明第三实施例所绘示的转弯系统的方块图。
23.图9为依据本发明第三实施例所绘示的执行转弯系统的流程图。
24.图10为依据本发明第三实施例所绘示的车辆转弯时的轮胎与地面的示意图。
25.主要组件说明
26.[0027][0028]
如下具体实施例将结合上述附图进一步说明本发明。
具体实施方式
[0029]
此处将参照相对应的图示,更详细描述本发明揭露的各种实施例。然而,本发明揭露可以被不同样态的实验例所实现,不应受所描述的具体实施例的范围所限制。相反地,提供这些实施例是为使本发明揭露清楚和完整,并使本领域技术人员能充份地理解本发明揭露的范围。相同的图标标号始终表示相同的组件。
[0030]
在此用于描述特定实施例的术语不应局限本发明揭露。除非上下文另外清楚地指出,否则在此使用的单数形式「一」、「一个」及「该」也包括复数形式。在此所使用的「包括」、「包含」或「有」将进一步被理解为指称存在着所述特征,区域,整体,步骤,操作,组件和/或组件,但并不排除存在或添加一个或多个其他特征,区域,整体,步骤,操作,组件,组件和/或其组合。
[0031]
术语「和/或」及「至少一个」应被理解为包括一个或多个相关所列项目的任何和所有组合。此外,虽然「第一」、「第二」及「第三」等术语被用于描述各种组件,部件,区域,部分和/或区段,但是这些组件,部件,区域,部分和/或部分不应该受这些术语所限制。这些术语仅用于区分一个元素,组件,区域,部分或区段与另一个元素,组件,区域,部分或区段。因此,在不脱离本发明揭露教示的情况下,下面讨论的第一组件,部件,区域,部分或区段可以被称为第二组件,部件,区域,部分或区段。
[0032]
本发明之转弯系统是为了防止驾驶人在转弯时,因为剎车而造成轮胎抱死,导致车辆失去稳定性。因此,本发明之转弯系统可用于监控车辆转弯时的状态(例如机车转弯时的倾斜角度),并且控制剎车,防止车辆在转弯时因为轮胎抱死而不稳,进而造成事故。
[0033]
第一实施例
[0034]
依据本发明的第一实施例的转弯系统包含转弯控制系统与制动控制系统,该转弯控制系统使用三个传感器,分别为重力传感器(gravity sensor,g-sensor)、第一传感器和第二传感器,其提供感测信号至第一电控单元(first electronic control unit,ecu),并透过第一电控单元传送控制信号至制动控制系统以控制制动力。
[0035]
请参阅图1依据本发明实施例所绘示的转弯系统的方块图。本发明实施例之转弯稳定系统100包含转弯控制系统110与制动控制系统120,转弯控制系统110与制动控制系统120耦合。该转弯控制系统110会侦测车辆的状态,判断车辆是否正在转弯以及剎车,并且传送控制信息至制动控制系统120。该制动控制系统120可根据使用者的控制,减缓或停止车辆,其亦会根据转弯控制系统110提供的控制信号,减缓或停止车辆。在一实施例中,制动控制系统120可以是防抱死剎车系统(antilock brake system,abs)。
[0036]
进一步请参阅图2,转弯控制系统110包括重力传感器210、第一传感器220、第二传感器230以及第一电控单元240。
[0037]
如图2所示,转弯控制系统110的重力传感器210、第一传感器220和第二传感器230分别与第一电控单元240耦合。重力传感器210用以侦测车辆与水平面的角度,以获得一重力感测信号,并传送该重力感测信号至第一电控单元240;第一传感器220用以侦测车辆的第一侧边与地面之间的距离,以获得一第一距离感测信号;第二传感器230用以侦测车辆的第二侧边与地面之间的距离,以获得一第二距离感测信号,并且,第一传感器220与第二传感器230传送该第一距离感测信号与该第二距离感测信号至第一电控单元240,进而获得车辆与地面的角度。
[0038]
本文所述的第一侧边是指坐在车辆座椅上的使用者所见之车辆本体(例如车架)的左侧或右侧,而该第二侧边为相对于该第一侧边的另一侧。举例来说,当第一侧边为车辆本体的左侧,则第二侧边为车辆本体的右侧;当第一侧边为车辆本体的右侧,则第二边侧为车辆本体的左侧。第一电控单元240可接收重力传感器210、第一传感器220及第二传感器230的感测信号,并根据该感测信号判断车辆是否在转弯,进而传送控制信息至制动控制系统120。在一实施例中,第一电控单元240可以是处理器(processor)。
[0039]
制动控制系统120包括第二电控单元250(second ecu)和液压控制单元260(hydraulic control unit,hcu)。第二电控单元250用于接收第一电控单元240的控制信息,并且依据该控制信息控制液压控制单元260。在一实施例中,第二电控单元250可以是处理器。
[0040]
在此实施例中,第一电控单元240与第二电控单元250是分开设置。但是在另一实施例中,第一电控单元240与第二电控单元250亦可合并设置,在合并设置的实施例中,第一电控单元240与第二电控单元250整合为一电控单元,该电控单元可以执行第一电控单元240与第二电控单元250的功能。举例来说,该电控单元可接收重力传感器210、第一传感器220及第二传感器230的感测信号,并根据该感测信号判断车辆是否在转弯以及剎车,并且亦能控制液压控制单元260。
[0041]
液压控制单元260系配置为连接车辆的制动机构280,并且可施加一制动压力于制动机构280,带动制动机构280对轮胎产生一制动力以控制轮胎减速。在一实施例中,液压控制单元260可以是液压阀。在一实施例中,制动机构280可以为设置于剎车盘上的剎车钳。举例来说,当液压阀施加的制动压力至剎车钳上,其带动剎车钳夹住剎车盘,并摩擦剎车盘,迫使轮胎转速降低至停止。
[0042]
液压控制单元260亦配置为与车辆的制动手柄270连接,该制动压力可对应于使用者施加于制动手柄270的力,亦可由第二电控单元250控制。例如,制动手柄270可为剎车把手,当使用者欲剎车时,会按压剎车把手,其对于剎车把手施加的力,会使得液压控制单元260对应该力而产生剎制动压力于制动机构280,带动制动机构280控制轮胎减速。又例如,该液压控制单元260系与第二电控单元250连接,并且受到第二电控单元250的控制而减少制动压力,并带动制动机构280以防止轮胎抱死(例如使得剎车钳松开剎车盘)。
[0043]
请参照图3执行第一实施例之转弯系统的步骤流程图。在步骤s1:重力传感器210侦测第一倾角θ1,以获得重力感测信号,并且传送重力感测信号至第一电控单元240。在步骤s2,第一传感器220侦测车辆的第一侧边与地面之间的第一倾斜距离d1,以获得一第一距离感测信号,并且传送该第一距离感测信号至第一电控单元240;在步骤s3,第二传感器230侦测车辆的第二侧边与地面之间的第二倾斜距离d2,以获得一第二距离感测信号,并且传送该第二距离感测信号至第一电控单元240。在步骤s4,第一电控单元240根据第一距离感测信号与第二距离感测信号计算第二倾角θ2。
[0044]
如图4依据第一实施例所绘示的车辆转弯时与地面的示意图。第一倾角θ1为车辆相对于水平面角度,而第二倾角θ2为车辆相对于地面的角度。当车辆于平面转弯时,第一倾角θ1会等于第二倾角θ2;当车辆于斜面转弯时,第一倾角θ1不等于第二倾角θ2。
[0045]
第一倾角θ1是由配置于车辆的重力传感器210所侦测。举例来说,重力传感器210可配置于车辆的重心,并且安装于第一电控单元240的电路板上,或安装于第一电控单元240的电路板之外,并以线路连接。在一实施例中,重力传感器210可根据车辆的重量变化测得车辆倾斜的角度,例如加速度计(accelerometer)。
[0046]
第一传感器220配置于车辆的一第一侧边(以图4为例,其配置于车辆本体的左侧),并侦测车辆的第一侧边与地面之间的第一倾斜距离d1。在一实施例中,第一侧边与地面之间的距离可以是第一传感器220与地面之间的距离(请见图4)。
[0047]
第二传感器230配置于车辆的一第二侧边(以图4为例,其配置于车辆本体的右侧),与第一传感器230水平方向相对,其侦测车辆的第二侧边与地面的第二倾斜距离d2。在一实施例中,第二侧边与地面之间的距离可以是第二传感器230与地面之间的距离(请见图4)。
[0048]
在此实施例中,第一传感器220与第二传感器230是配置于车辆本体的左右两侧,且水平方向相对。但在另一实施例,第一传感器220与第二传感器230可配置于车辆的左右两侧,且非水平方向相对,在此实施例中,第一传感器220与第二传感器230的相对于水平面的高度差必须事先输入第一电控单元240。
[0049]
在此实施例中,第一传感器220与第二传感器230设置于后轮中心的左右两侧。但在另一实施例,第一传感器220与第二传感器230可以设置于前轮中心的左右两侧。又,在另一实施例中,第一传感器220与第二传感器230可以设置于后轮与前轮之间的左右两侧。
[0050]
在一实施例中,第一传感器220与第二传感器230可以是设置在车辆的轮胎的光、音波或影像传感器。
[0051]
请再次参阅图3,在步骤s4,第一电控单元240根据第一倾斜距离d1与第二倾斜距离d2,再依据第一传感器220与第二传感器230之间的水平距离l,计算得到车辆相对于地面的第二倾角θ2,接着进入步骤s5。所述第二倾角θ2是根据下列公式计算:
[0052][0053]
在步骤s5,第一电控单元240会判断车辆是否正在转弯,若第一倾角θ1或第二倾角θ2不等于90度,或是第一倾角θ1与第二倾角θ2皆不等于90度,则第一电控单元240会判断车辆正在转弯,接着会进入步骤s6;若第一倾角θ1与第二倾角θ2等于90度,则第一电控单元240会判断车辆不是在转弯,便会回到步骤s1。
[0054]
在步骤s6,当使用者对制动手柄270施加的力,带动液压控制单元260施加一制动压力与制动机构280,该制动机构280对车辆轮胎产生一制动力fx,当制动力fx被设置于制动机构280上的传感器侦测到后,转弯系统100会进入步骤s7。
[0055]
在步骤s7,转弯系统100的第一电控单元240会根据车辆规格、轮胎特性于转弯当下的角度、速度变化,以卡尔曼滤波(kalman filter)估算施加于轮胎且与制动力fx垂直的侧向力fy。接着,第一电控单元240会进行步骤s8。
[0056]
在此实施例中,是步骤s6先于步骤s7,惟在另一实施例中,亦可步骤s7先于步骤s6。又,在另一实施例中,步骤s6与步骤s7可同时进行,也就是说,第一电控单元240可同时获得制动力fx以及计算侧向力fy。
[0057]
在步骤s8,第二电控单元250会计算制动力fx与侧向力fy所产生的合力f,并且进入步骤s9。所述合力f是依据以下算式而得:
[0058][0059]
在步骤s9,第二电控单元250会判断合力f是否大于初始所设定的一预设阈值。若判断合力f大于或等于该预设阈值,第一电控单元240会判断车辆正在剎车,并且传送控制信息至制动控制系统120的第二电控单元250,第二电控单元250会根据控制信息控制液压控制单元260减少制动压力,以带动制动机构280减少施加于轮胎的制动力fx,防止轮胎抱死,进而稳定车辆;若判断合力f小于预设阈值,则转弯系统100会回到步骤s6。
[0060]
该预设阈值为本领域技术人员可根据不同车辆之规格而计算获得。在一实施例中,预设阈值范围介于1%~70%车重(n),其预设阈值可为10%、20%、30%、40%、50%或60%车重(n)。在另一实施例中,预设阈值可为2%~30%车重(n),其预设阈值可为5%、10%、15%、20%或25%车重(n)。
[0061]
第二实施例
[0062]
本发明的转弯系统的第二实施例的基于前述第一实施例,其转弯控制系统系使用两个传感器,分别为重力传感器和第一传感器,其提供感测信号至第一电控单元,并透过第一电控单元传送控制信息至制动控制系统以控制制动力。
[0063]
请参阅图5,为显示本发明的转弯系统100的第二实施例示意图。转弯控制系统110包括重力传感器210、第一传感器220以及第一电控单元240。重力传感器210和第一传感器
220分别与第一电控单元240耦合。重力传感器210用以侦测车辆与水平面的角度,以获得一重力感测信号,并传送该重力感测信号至第一电控单元240;第一传感器220用以侦测车辆的第一侧边与地面之间的距离,以获得一第一距离感测信号,并传送该第一距离感测信号至第一电控单元240,进而获得车辆与地面的角度。
[0064]
请参照图6执行第二实施例之转弯系统的步骤流程图。在步骤s1:重力传感器210侦测第一倾角θ1,以获得重力感测信号,并且传送重力感测信号至第一电控单元240。在步骤s2,第一传感器220侦测车辆的第一侧边与地面之间的第一倾斜距离d1,以获得一第一距离感测信号,并且传送该第一距离感测信号至第一电控单元240。在步骤s3,第一电控单元240根据该第一距离感测信号计算第二倾角θ2。
[0065]
请参照图7依据第二实施例所绘示的车辆转弯时的轮胎与地面的示意图。第一倾角θ1是由配置于车辆的重力传感器210所侦测。举例来说,重力传感器210可配置于车辆的重心,像是安装于第一电控单元240的电路板上,或安装于第一电控单元240的电路板之外,并以线路连接。在一实施例中,重力传感器210可根据车辆的重量变化测得车辆倾斜的角度,例如加速度计(accelerometer)。
[0066]
第一传感器220配置于车辆的一侧(以图7为例,其配置于车辆本体的左侧),而车辆未转弯时与地面之距离d系作为预设值事先输入第一电控单元240。在一实施例中,如图7所示,车辆未转弯时与地面之距离d可以是第一传感器220未转弯时与地面之间的距离。并且,第一传感器220可侦测车辆的第一侧边与地面的第一倾斜距离d1。在一实施例中,如图7所示,该第一倾斜距离d1可以是车辆在转弯时第一传感器220与地面之间的距离。
[0067]
又,在一实施例中,该第一传感器220可以是设置在车辆的轮胎中心的光、音波或影像传感器。
[0068]
在步骤s3,第一电控单元240根据车辆未转弯时与地面之垂直距离d与该第一倾斜距离d1计算第二倾角θ2,接着进入步骤s4。所述第二倾角θ2是根据下列公式计算:
[0069]
若d1》d,若d1《d,
[0070]
第二实施例的转弯系统之步骤s5~s9与第一实施例之步骤s5~s10,在此不再赘述。
[0071]
第三实施例
[0072]
本发明的转弯系统的第三实施例的基于前述第一实施例,其转弯控制系统将第一实施例的第一传感器和第二传感器,替换为第一悬挂行程传感器与第二悬挂行程传感器,其提供悬挂行程信号至第一电控单元,并透过第一电控单元传送控制信息至制动控制系统以控制制动力。
[0073]
请参阅图8,为显示本发明的转弯系统100的第三实施例示意图。转弯控制系统110的重力传感器210、第一悬挂行程传感器810和第二悬挂行程传感器820分别与第一电控单元240耦合。重力传感器210用以侦测车辆与水平面的角度,以获得一重力感测信号,并传送该重力感测信号至第一电控单元240;第一悬挂行程传感器810用以侦测第一悬吊机构的第一悬挂行程,以获得第一悬挂行程信号;第二悬挂行程传感器820用以侦测第二悬吊机构的第二悬挂行程,以获得第二悬挂行程信号,并且,第一悬挂行程传感器810与第二悬挂行程传感器820传送该第一悬挂行程信号与该第二悬挂行程信号至第一电控单元240,进而获得
车辆与地面的角度。
[0074]
请参照图9执行第三实施例之转弯系统的步骤流程图。在步骤s1:重力传感器210侦测第一倾角θ1,以获得重力感测信号,并且传送重力感测信号至第一电控单元240。在步骤s2,第一悬挂行程传感器810侦测第一悬吊机构的第一悬挂行程l1,以获得第一悬挂行程信号,并且传送第一悬挂行程信号至第一电控单元240。在步骤s3,第二悬挂行程传感器820侦测第二悬吊机构的第二悬挂行程l2,以获得第二悬挂行程信号,并且传送第二悬挂行程信号至第一电控单元240。在步骤s4,第一电控单元240根据第一悬挂行程传感器810及第二悬挂行程传感器820的第一悬挂行程感测信号与第二悬挂行程信号计算第二倾角θ2。
[0075]
请参照图10依据第三实施例所绘示的车辆时的转弯与地面的示意图。第一倾角θ1是由配置于车辆的重力传感器210所侦测。举例来说,重力传感器210可配置于车辆的重心,像是安装于第一电控单元240的电路板上,或安装于第一电控单元240的电路板之外,并以线路连接。在一实施例中,重力传感器210可根据车辆的重量变化测得车辆倾斜的角度,例如加速度计(accelerometer)。
[0076]
第一悬挂行程传感器810与第二悬挂行程传感器820设置邻近第一悬吊机构1010与第二悬吊机构1020,用以对第一悬吊机构1010与第二悬吊机构1020的悬挂行程与进行监控,并且对应输出悬挂行程信号至第一电控单元240。
[0077]
在此实施例中,第一悬挂行程传感器810与第二悬挂行程传感器820是配置于后轮左右两侧。但是在另一实施例中,第一悬挂行程传感器810与第二悬挂行程传感器820可以配置于前轮的左右两侧。
[0078]
本发明所使用的悬挂行程传感器可以是一滑动变组器与一调整单元之组合。该调整单元为一滑杆机构,其系安装于的车辆的车架摆臂与车架主体之间。于此设计中,随着第一悬吊机构1010或第二悬吊机构1020进行悬挂行程,其悬挂行程可以是释放行程或压缩行程,该滑杆机构之中的滑杆也会随着伸长或缩回,进而带动滑动变阻器之上的电阻值调整钮移动,藉此方式调整该滑动变阻器之电阻值。是以,根据该滑动变阻器之电阻值的改变,第一悬挂行程传感器810与第二悬挂行程传感器820可以分别依据第一悬挂行程l1与第二悬挂行程l2,获得第一悬挂行程信号与第二悬挂行程信号,并将对应悬挂行程信号输出至第一电控单元240,第一电控单元240便可以计算并车辆的倾斜角度,进而判断车辆是否处于正在转弯。在另一实施例中,该滑杆机构系能够以拉杆机构或推杆机构替换。
[0079]
在另一实施例中,悬挂行程传感器可以是一旋转式变阻器与一连杆机构之组合。如此设置,随着第一悬吊机构1010或第二悬吊机构1020进行悬挂行程,悬挂行程可以是释放行程或压缩行程,该连杆机构会旋动该旋转式变阻器之上的旋钮,藉此方式调整该旋转式变阻器之电阻值。是以,根据该旋转式变阻器之电阻值的改变,第一悬挂行程传感器810与第二悬挂行程传感器820可以分别依据第一悬挂行程l1与第二悬挂行程l2,获得第一悬挂行程信号与第二悬挂行程信号,并将对应悬挂行程信号输出至第一电控单元240,第一电控单元240便可以计算并车辆的倾斜角度,进而判断车辆是否处于正在转弯。在另一实施例中,该连杆机构系能够选择性地搭配齿轮机构使用。
[0080]
在一实施例中,悬吊机构可以是避震器或弹簧。
[0081]
请再次参照图9,在步骤s4,第一电控单元240根据第一悬挂行程l1与第二悬挂行程l2计算第二倾角θ2,再依据为第一悬挂传感器810与第二悬挂传感器820之间的水平距离
l计算得到车辆相对于地面的第二倾角θ2,接着进入步骤s5。所述第二倾角θ2是根据下列公式计算:
[0082][0083]
第三实施例之步骤s5~s10与第一实施例之步骤s5~s10,在此不再赘述。
[0084]
综上所述,本发明的转弯系统透过侦测车辆转弯时的状态(例如机车的倾斜角度)以及施加于轮胎上的制动力(剎车力),判断车辆在转弯时是否剎车力过大,进而控制剎车力,以防止车辆在转弯时因为轮胎抱死而造成车身不稳。因此,本发明的转弯系统可维持车辆在转弯时的稳定性。
[0085]
该些实施例和申请专利范围并不一定需要达成所有已揭露的技术优点或技术特征。更进一步地,该摘要和该标题仅为便利专利文件检索之用,且不在任何方面旨于限制本发明之范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1