变道预警方法、变道预警装置、车辆和存储介质与流程
1.本技术涉及车辆技术领域,特别涉及一种车辆的变道预警方法、变道预警装置、车辆和存储介质。
背景技术:
2.车辆变道时,需要同时观察车辆前方多个车道和后方多个车道的车辆,在判断安全的情况下方可变换车道。车辆高级驾驶辅助系统可以辅助用户进行上述判断。然而,相关技术中,车辆高级驾驶辅助系统对车辆进行变道预警时容易发生错误预警,例如虚假预警、重复预警或延迟预警等,影响行车安全。
技术实现要素:
3.有鉴于此,本技术的实施例提供了一种车辆的变道预警方法、变道预警装置、车辆和存储介质。
4.本技术提供了一种车辆的变道预警方法,所述变道预警方法包括:
5.获取当前行驶车道的车道线信息;
6.获取所述车辆的第一状态信息;
7.获取所述车辆的周围车辆的第二状态信息;
8.根据所述车道线信息、所述第一状态信息和所述第二状态信息对所述车辆进行变道预警。
9.在某些实施方式中,所述获取当前行驶的车道线信息包括:
10.获取车辆摄像头采集的车道线图像;
11.根据预设模型对所述车道线图像进行处理以得到所述车道线信息,所述车道线信息包括道路的曲率、长度和/或宽度。
12.在某些实施方式中,所述获取所述车辆的第一状态信息包括:
13.获取车辆惯性测量系统采集的车辆运动信息;
14.获取定位系统采集的车辆位置信息;
15.将所述车辆运动信息和所述车辆位置信息进行融合处理以得到所述车辆的第一状态信息。
16.在某些实施方式中,所述获取所述车辆的周围车辆的第二状态信息包括:
17.融合车辆雷达系统中多个车载雷达采集的所述周围车辆相对所述车辆位置信息和/或速度信息以获取所述第二状态信息。
18.在某些实施方式中,所述变道预警方法还包括:
19.根据所述第二状态信息更新所述周围车辆的轨迹信息。
20.在某些实施方式中,所述根据所述车道线信息、所述第一状态信息和所述第二状态信息对所述车辆进行变道预警包括:
21.根据所述轨迹信息确定所述周围车辆相对所述车辆的相对信息,所述相对信息包
括相对位置信息、相对速度信息和相对距离信息;
22.根据预设的变道预警模型和所述相对信息确定所述车辆进行变道是否存在风险。
23.在某些实施方式中,所述根据所述车道线信息、所述第一状态信息和所述第二状态信息对所述车辆进行变道预警包括:
24.在所述车辆进行变道存在风险的情况下,生成相应的预警信息以对用户进行车辆变道预警。
25.本技术提供了一种变道预警装置,所述变道预警装置包括:
26.获取模块,所述获取模块用于获取当前行驶车道的车道线信息,及用于获取所述车辆的第一状态信息,以及用于获取所述车辆的周围车辆的第二状态信息;
27.预警模块,所述预警模块用于根据所述车道线信息、所述第一状态信息和所述第二状态信息对所述车辆进行变道预警。
28.本技术提供了一种车辆,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序时实现上述任一实施方式所述的车辆的变道预警方法。
29.本技术提供了一个或多个存储有计算机程序的非易失性计算机可读存储介质,当所述计算机程序被一个或多个处理器执行时,实现上述任一实施方式所述的车辆的变道预警方法。
30.本技术实施方式的车辆的变道预警方法、变道预警装置、车辆和存储介质中,通过获取车道线信息、车辆的第一状态信息和周围车辆的第二状态信息,对车辆进行变道预警,能够提高车辆变道预警的准确性,确保行车安全,且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,提高乘车舒适度,优化用户体验。
附图说明
31.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
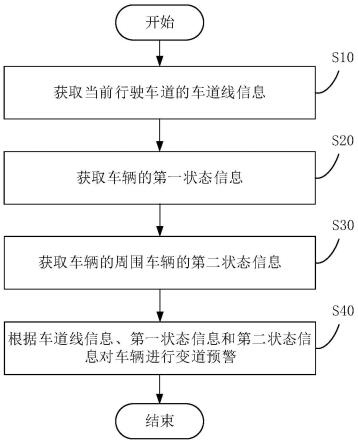
32.图1是本技术某些实施方式的车辆的变道预警方法的流程示意图。
33.图2是本技术某些实施方式的车辆的结构示意图。
34.图3是本技术某些实施方式的变道预警装置的模块示意图。
35.图4是本技术某些实施方式的变道预警方法的流程示意图。
36.图5是本技术某些实施方式的变道预警方法的流程示意图。
37.图6是本技术某些实施方式的变道预警方法的流程示意图。
38.图7是本技术某些实施方式的变道预警方法的流程示意图。
39.图8是本技术某些实施方式的变道预警方法的流程示意图。
具体实施方式
40.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
41.请参阅图1,本技术提供一种车辆的变道预警方法,包括:
42.s10:获取当前行驶车道的车道线信息;
43.s20:获取车辆的第一状态信息;
44.s30:获取车辆的周围车辆的第二状态信息;
45.s40:根据车道线信息、第一状态信息和第二状态信息对车辆进行变道预警。
46.请参阅图2,本技术实施方式提供了一种车辆100。车辆100包括处理器12和存储器14,存储器14存储有计算机程序16,计算机程序16被处理器12执行时实现:获取当前行驶车道的车道线信息,获取车辆100的第一状态信息,获取车辆100的周围车辆的第二状态信息,以及根据车道线信息、第一状态信息和第二状态信息对车辆100进行变道预警。其中,处理器12可以是为进行车辆100初始化而独立设置的处理器12,也可以是车辆100行车系统的处理器12,在此不做限制。
47.请参阅图3,本技术实施方式还提供了一种变道预警装置110,本技术实施方式的车辆100的变道预警方法可以由变道预警装置110实现。变道预警装置110包括获取模块112和预警模块114。s10-s30可以由获取模块112实现,s40可以由预警模块114实现。或者说,获取模块112用于获取当前行驶车道的车道线信息,及用于获取车辆100的第一状态信息,以及用于获取车辆100的周围车辆的第二状态信息。预警模块114用于根据车道线信息、第一状态信息和第二状态信息对车辆进行变道预警。
48.具体地,变道预警旨在在当前车辆100变换车道行驶的情况下,对相邻或相近的车道的车辆进行检测,判断当前车辆100当下变换车道是否存在风险,从而对当前车辆100进行变道预警,保障行车安全。相关技术中,多使用车辆高级驾驶辅助系统(advanced driving assistance system,adas)进行辅助判断,然而,adas对车辆100进行变道预警时容易发生错误预警,例如虚假预警、重复预警或延迟预警等,且由于车辆100用于变道预警的传感器种类和数量不足,在数据缺失时没有相应的数据补充,因此导致车辆变道预警的错误率较高。
49.本技术实施方式的车辆的变道预警方法、变道预警装置110、车辆100和存储介质中,通过获取车道线信息、当前车辆100的第一状态信息和周围车辆的第二状态信息,对当前车辆100进行变道预警,能够提高车辆变道预警的准确性,确保行车安全,且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,能够提高乘车舒适度,优化用户体验。
50.请参阅图4,在某些实施方式中,s10包括:
51.s11:获取车辆摄像头采集的车道线图像;
52.s12:根据预设模型对车道线图像进行处理以得到车道线信息。
53.在某些实施方式中,s11和s12可以由获取模块112实现。或者说,获取模块112用于获取车辆摄像头采集的车道线图像,以及用于根据预设模型对车道线图像进行处理以得到车道线信息。
54.在某些实施方式中,处理器12用于获取车辆摄像头采集的车道线图像,以及用于根据预设模型对车道线图像进行处理以得到车道线信息。
55.具体地,车辆摄像头对当前车辆100周围的车道线进行拍摄,拍摄的车道线图像中可以包括车道线和车道线与当前车辆100的位置。车道线与当前车辆100的位置可以表征当前车辆100是否处于一个车道未进行变道,或者当前车辆100正在向左变道,或者当前车辆100正在向右变道。
56.根据预设模型对车道线图像进行处理,得到车道线信息。其中,预设模型可以是任意能够进行机器学习的模型,例如可以是支持向量机(support vector machine,svm)模型,也可以是卷积神经网络(convolutional neural networks,cnn)模型,具体不做限定。对车道线进行处理的过程包括但不限于:对车道线图像进行提取、拟合、追踪和去伪等。可以认为,提取是指在采集到的车道线图像中提取出车道线参数,拟合是指对于提取得到的若干个车道线参数进行拟合,生成动态变化的车道线,追踪是指将所生成的车道线与车道线图像中的车道线进行动态比较,去伪是指在对于上述比较中的不合理的车道线参数进行去除,进而生成车道线信息。
57.车道线信息中包括当前道路的曲率、位置、长度和/或宽度等。车辆100可以根据车道线信息和当前车辆100的第一状态信息、周围车辆的第二状态信息对当前车辆100进行变道预警,进而提升车辆变道预警的准确性,确保行车安全。
58.在一些实施例中,车辆摄像头采集到当前车辆100周围的车道线图像,车道线图像中当前车辆100未与车道线发生交汇,则可以认为当前车辆100在当下未进行变道。根据cnn模型对车道线图像进行提取、拟合、追踪和去伪,能够得到车道线信息。车道线信息中包括当前道路的曲率、位置、长度和/或宽度等,可以用于后续预测当前车辆100是否进行变道,或用于预测周围车辆是否进行变道。
59.如此,能够实现对车道线的准确检测,进而提高车辆变道预警的准确性,确保行车安全。
60.请参阅图5,在某些实施方式中,s20包括:
61.s21:获取车辆惯性测量系统采集的车辆运动信息;
62.s22:获取定位系统采集的车辆位置信息;
63.s23:将车辆运动信息和车辆位置信息进行融合处理以得到车辆100的第一状态信息。
64.在某些实施方式中,s21-s23可以由获取模块112实现。或者说,获取模块112用于获取车辆惯性测量系统采集的车辆运动信息,及用于获取定位系统采集的车辆位置信息,以及用于将车辆运动信息和车辆位置信息进行融合处理以得到车辆的第一状态信息。
65.在某些实施方式中,处理器12用于获取车辆惯性测量系统采集的车辆运动信息,及用于获取定位系统采集的车辆位置信息,以及用于将车辆运动信息和车辆位置信息进行融合处理以得到车辆的第一状态信息。
66.具体地,可以由车辆惯性测量系统采集车辆运动信息,由车辆定位系统采集的车辆位置信息。其中,车辆运动信息包括当前车辆100行驶的速度、加速度、航向角等表征当前车辆100运动状态的信息,车辆惯性测量系统可以是陀螺仪、惯性测量单元等能够采集当前车辆运动信息的系统,具体不做限定。车辆位置信息可以是指当前车辆100的定位,当前车辆100的定位可以通过全球定位系统、北斗卫星导航系统和/或格洛纳斯系统等定位系统获得,具体不做限定。
67.将车辆运动信息和车辆位置信息进行融合处理,并结合当前行驶车道的车道线信息,可以得到当前车辆100的第一状态信息。其中,第一状态信息可以是指当前车辆100与车道线的相对位置、相对速度、相对距离。
68.在一些实施例中,车辆摄像头采集当前行驶车道的车道线图像,车辆100根据预设
模型对车道线图像进行处理,得到车道线信息。惯性测量单元采集当前车辆100的运动信息,全球定位系统采集当前车辆100的位置信息。车辆100根据车道线信息、当前车辆100的运动信息和当前车辆100的位置信息,得到当前车辆100的第一状态信息为:当前车辆100在当前行驶的车道中偏向左侧行驶,距离当前行驶车道的左侧车道线较近,且与当前行驶车道的车道线的相对速度较小。则可以预测当前车辆100可能要向左变换车道。
69.如此,能够实现对当前车辆100是否打算变换车道的准确预测,提高车辆变道预警的准确性,确保行车安全。且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,能够提高乘车舒适度,优化用户体验。
70.请参阅图6,在某些实施方式中,s30包括:
71.s31:融合车辆雷达系统中多个车载雷达采集的周围车辆相对车辆100位置信息和/或速度信息以获取第二状态信息。
72.在某些实施方式中,s31可以由获取模块112实现。或者说,获取模块112用于融合车辆雷达系统中多个车载雷达采集的周围车辆相对车辆100位置信息和/或速度信息以获取第二状态信息。
73.在某些实施方式中,处理器12用于融合车辆雷达系统中多个车载雷达采集的周围车辆相对车辆100位置信息和/或速度信息以获取第二状态信息。
74.具体地,车辆雷达系统中的车载雷达可以是激光雷达、毫米波雷达中的一种或多种雷达的结合,还可以是激光雷达、毫米波雷达中的一种或多种雷达与摄像头系统的结合,具体不做限定。车载雷达可以设置于当前车辆100的前方和两侧,用于检测周围车辆的相对于当前车辆100的位置信息和/或速度信息。
75.车载雷达系统采集周围车辆相对于当前车辆100的位置信息和/或速度信息,并对周围车辆的位置信息和/或速度信息进行融合处理,得到周围车辆的第二状态信息。其中,可以认为第二状态信息是经过融合处理的周围车辆相对于当前车辆100的位置信息和/或速度信息,相较于处理前的相对位置和相对速度,第二状态信息中去除了异常数据和错误数据。
76.如此,能够实现对周围车辆是否打算变换车道的准确预测,提高车辆变道预警的准确性,确保行车安全。且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,能够提高乘车舒适度,优化用户体验。
77.在某些实施方式中,变道预警方法包括:
78.s50:根据第二状态信息更新周围车辆的轨迹信息。
79.在某些实施方式中,s50可以由预警模块114实现。或者说,预警模块114用于根据第二状态信息更新周围车辆的轨迹信息。
80.在某些实施方式中,处理器12用于根据第二状态信息更新周围车辆的轨迹信息。
81.具体地,可以根据第二状态信息更新周围车辆的轨迹信息,筛选出周围车辆中的目标车辆。其中,目标车辆可以是指与当前车辆100同向行驶的、可能与当前车辆100发生碰撞的车辆。
82.在一些实施例中,车辆雷达系统采集周围车辆相对于当前车辆100的位置信息和速度信息,得到的周围车辆a的第二状态信息为:周围车辆a在当前车辆100左侧,行驶速度较快。根据多次获取到的周围车辆a的第二状态信息,更新周围车辆a的轨迹信息为:周围车
辆a在当前车辆100左后方且与当前车辆100的相对距离越来越近,则可以初步判断周围车辆a可能进行变道。
83.在另一些实施例中,车辆雷达系统采集周围车辆相对于当前车辆100的位置信息和速度信息,得到的周围车辆b的第二状态信息为:周围车辆b在当前车辆100的左侧,行驶速度较慢。根据多次获取到的周围车辆b的第二状态信息,更新周围车辆b的轨迹信息为:周围车辆b在当前车辆100左后方且与当前车辆100的相对距离越来越远,则可以初步判断周围车辆b变道与否不会对当前车辆100产生影响。
84.如此,能够实现对周围车辆是否打算变换车道的准确预测,提高车辆变道预警的准确性,确保行车安全。且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,能够提高乘车舒适度,优化用户体验。
85.请参阅图7,在某些实施方式中,s40包括:
86.s41:根据轨迹信息确定周围车辆相对车辆100的相对信息;
87.s42:根据预设的变道预警模型和相对信息确定车辆100进行变道是否存在风险。
88.在某些实施方式中,s41和s42可以由预警模块114实现。或者说,预警模块114用于根据轨迹信息确定周围车辆相对车辆100的相对信息,以及用于根据预设的变道预警模型和相对信息确定车辆100进行变道是否存在风险。
89.在某些实施方式中,处理器12用于根据轨迹信息确定周围车辆相对车辆100的相对信息,以及用于根据预设的变道预警模型和相对信息确定车辆100进行变道是否存在风险。
90.具体地,根据轨迹信息确定周围车辆相对车辆100的相对信息,其中,相对信息包括周围车辆的相对位置信息、相对速度信息和相对距离信息。例如,根据周围车辆a的轨迹信息,确定周围车辆a相对于当前车辆100的相对信息为:a在当前车辆100左后方、a与当前车辆100相对静止、a与当前车辆100相距80米。
91.进一步地,相对信息还可以包括周围车辆的绝对速度、追踪次数等。其中追踪次数是指周围车辆位于当前车辆100雷达系统的检测范围内的次数。例如,雷达系统的检测范围为170米,周围车辆a在初始时刻与当前车辆100相距200米,后周围车辆a加速行驶至与当前车辆100相距100米的位置,再减速行驶直至与当前车辆100相距200米。周围车辆a位于当前车辆100的雷达系统的检测范围内的次数为1,则周围车辆a的追踪次数为1。
92.得到相对信息后,根据预设的变道预警模型和相对信息,确定当前车辆100进行变道是否存在风险。其中,预设的变道预警模型可以是任意能够进行机器学习的模型,例如可以是svm模型,也可以是cnn模型,具体不做限定。变道预警模型用于对周围车辆进行筛选,去除对当前车辆100不存在风险的周围车辆的相对信息。
93.在一些实施例中,周围车辆a相对于当前车辆100的相对信息为a在当前车辆100左前方、a相对于当前车辆100的速度为-20公里每小时、a与当前车辆100相距80米。周围车辆b相对于当前车辆100的相对信息为b在当前车辆100左前方、b相对于当前车辆100的速度为40公里每小时、b与当前车辆100相距120米。变道预警模型根据相对信息,筛选出对当前车辆100存在风险的周围车辆a,且根据周围车辆a的相对信息,判断出当前车辆100向左变道存在风险。
94.进一步地,变道预警模型还可以确定周围车辆进行变道对于当前车辆100是否存
在风险。在一些实施例中,周围车辆a相对于当前车辆100的相对信息为a在当前车辆100左前方、a相对于当前车辆100的速度为-20公里每小时、a与当前车辆100相距80米。此时变道预警模型判断当前车辆100无需变道行驶,且根据周围车辆a的相对信息,进一步判断出周围车辆a可能进行变道,周围车辆a对于当前车辆存在风险。
95.如此,能够融合多种信息实现对周围车辆是否打算变换车道的准确预测,提高车辆变道预警的准确性,确保行车安全。且进行变道预警能够减少行车过程中的紧急制动或紧急加速的次数,能够提高乘车舒适度,优化用户体验。
96.请参阅图8,在某些实施方式中,s40包括:
97.s43:在车辆100进行变道存在风险的情况下,生成相应的预警信息以对用户进行车辆变道预警。
98.在某些实施方式中,s43可以由预警模块114实现。或者说,预警模块114用于在车辆100进行变道存在风险的情况下,生成相应的预警信息以对用户进行车辆变道预警。
99.在某些实施方式中,处理器12用于在车辆100进行变道存在风险的情况下,生成相应的预警信息以对用户进行车辆变道预警。
100.具体地,在车辆进行变道存在风险的情况下,生成相应的预警信息以对用户进行车辆变道预警。其中,向当前车辆100进行变道预警的方式可以是在车辆100中控大屏显示预警信息,也可以是在车辆100抬头显示区进行相应的预警提示,还可以是使用车内灯光进行辅助提醒,具体不做限定。
101.在一些实施例中,根据变道预警模型和周围车辆的相对信息,判断当前车辆100向左变道存在风险,也即是说,周围车辆a与当前车辆100的相对距离小于预设的最小变道安全距离,则在当前车辆100中控大屏显示预警信息:当前向左变道存在风险,请谨慎驾驶。
102.如此,能够根据车辆状况准确地制定适当的预警信息,并通过多方式对用户进行变道预警,从而提醒用户道路情况,确保行车安全。
103.本技术实施方式还提供了一种计算机可读存储介质。一个或多个存储有计算机程序的非易失性计算机可读存储介质,当计算机程序被一个或多个处理器执行时,实现上述任一实施方式的车辆100的变道预警方法。
104.本技术实施方式还提供了一种车辆。车辆包括存储器及一个或多个处理器,一个或多个程序被存储在存储器中,并且被配置成由一个或多个处理器执行。程序包括用于执行上述任意一项实施方式所述的车辆的变道预警方法的指令。
105.处理器可用于提供计算和控制能力,支撑整个车辆的运行。车辆的存储器为存储器其中的计算机可读指令运行提供环境。
106.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,程序可存储于一个或多个非易失性计算机可读存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)等。
107.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1