一种车辆及其智能无障碍踏板控制方法和系统与流程
1.本发明涉及一种车辆及其智能无障碍踏板控制方法和系统,属于车辆智能控制技术领域。
背景技术:
2.随着自动驾驶技术的发展,自动驾驶汽车和共享服务会越来越普及,未来会成为人们出行的主流选择方式。目前为人们出行服务的自动驾驶汽车(包含微循环车、公交车等)都为方面特殊人群(如乘坐轮椅的乘客、行动不便的老人等)上下提供的踏板设计,但是仍然需要人工去抬起和放下;当特殊人群独自乘车时仍会遇到麻烦,无法方便上下车。现有技术上踏板主要是由人工操作,更多的是考虑到有人协助的情况下完成无障碍踏板的伸缩;在自动驾驶汽车没有安全员或乘客协助的情况下,无法实现针对特殊人群(如乘坐轮椅的乘客、行动不便的老人等)自动伸缩无障碍踏板的功能,从而给特殊人群乘车造成障碍。
3.为此,有人提出对踏板的自动控制,例如申请公布号为cn110217176a的专利申请文件,该专利申请文件公开一种迎宾踏板调控方法,并具体公开在接收到控制迎宾踏板展开的信号,通过图像采集器采集乘车人员的图像,并通过分析图像获得乘车人员的图像数据,根据图像数据确定迎宾他班的展开高度与伸出宽度,并按此对迎宾踏板进行控制,以适应特殊人群上下车的需求。上述方案虽然能够解决踏板的自动伸缩控制,但是没有对自动伸缩过程进行监测,一旦有人不小心处于自动伸缩的踏板装置附近,不但会造成人员夹伤,还会损坏自动伸缩踏板装置。
技术实现要素:
4.本发明的目的是提供一种车辆及其智能无障碍踏板控制方法和系统,以解决目前智能踏板自动伸缩中缺乏监测导致人员夹伤、设备损坏的问题。
5.本发明为解决上述技术问题而提供一种车辆智能无障碍踏板控制方法,该控制方法包括以下步骤:
6.1)在车辆处于设定状态时,获取车内外乘客的图像数据,根据车内外乘客的图像数据判断车内外是否有乘客需要无障碍踏板;
7.2)当判断出有乘客需要无障碍踏板时,控制无障碍踏板进行弹出操作,并在无障碍踏板弹出操作中实时检测弹出阻力,若弹出阻力大于设定阈值时,则控制无障碍踏板停止弹出操作,若弹出阻力不大于设定阈值,则控制无障碍踏板弹出直至完全弹出。
8.本发明根据车内乘客的图像数据判断乘客是否需要无障碍踏板,在有乘客需要时,才控制无障碍踏板弹出,以能够灵活、及时地满足乘客需求;同时,在控制无障碍踏板弹出过程实时检测收到的阻力,若受到的阻力大于预设值时,则停滞弹出或收回,以防止无障碍踏板弹出过程中由于误判引起的人身伤害或者设备损坏,提高无障碍踏板的使用的安全性和设备寿命。
9.进一步,为实现无障碍踏板的自动收回,该方法还包括对无障碍踏板收回的控制,
采集的车内外的乘客图像数据,判断乘客是否均已完成上下车;在判断出所有乘客均已完成上下车时,判断无障碍踏板装置的状态,若无障碍踏板装置处于弹出状态时,则控制无障碍踏板装置进行收回操作。
10.进一步地,为防止无障碍踏板在收回过程中夹到人或者损害设备,在控制无障碍踏板装置进行收回操作时,实时检测收回阻力,判断该收回阻力是否超出设定阈值,若超出,则控制无障碍踏板装置停止收回工作,并发送阻力超限的语音提醒;若没有超过,则继续进行收回操作,直至无障碍踏板装置收回完成。
11.进一步地,为提高安全性,当判断出有乘客需要无障碍踏板时,则控制车辆保持在所述设定状态。
12.本发明还提供了一种车辆智能无障碍踏板控制系统,该控制系统包括图像采集装置、阻力监测装置和无障碍踏板控制装置,所述图像采集装置用于设置在车门上方,用于采集车内外乘客的图像数据,阻力监测装置用于采集无障碍踏板装置在弹出/收回时受到的阻力,无障碍踏板控制装置用于根据图像采集装置和阻力监测装置采集到的数据,在车辆处于设定状态时,获取车内外乘客的图像数据,根据车内外乘客的图像数据判断车内外是否有乘客需要无障碍踏板;当判断出有乘客需要无障碍踏板时,控制无障碍踏板进行弹出操作,并在无障碍踏板弹出操作中实时检测弹出阻力,若弹出阻力大于设定阈值时,则控制无障碍踏板停止弹出操作,若弹出阻力不大于设定阈值,则控制无障碍踏板弹出直至完全弹出。
13.本发明根据车内乘客的图像数据判断乘客是否需要无障碍踏板,在有乘客需要时,才控制无障碍踏板弹出,以能够灵活、及时地满足乘客需求;同时,在控制无障碍踏板弹出过程实时检测收到的阻力,若受到的阻力大于预设值时,则停滞弹出或收回,以防止无障碍踏板弹出过程中由于误判引起的人身伤害或者设备损坏,提高无障碍踏板的使用的安全性和设备寿命。
14.进一步地,为实现无障碍踏板的自动收回,所述无障碍踏板控制装置还包括对无障碍踏板收回的控制,当根据车内外的乘客图像数据,判断出所有乘客均已完成上下车时,判断无障碍踏板装置的状态,若无障碍踏板装置处于弹出状态时,则控制无障碍踏板装置进行收回操作。
15.进一步地,为防止无障碍踏板在收回过程中夹到人或者损害设备,所述的无障碍踏板控制装置在控制无障碍踏板装置进行收回操作时,通过阻力监测装置实时检测收回阻力,判断该收回阻力是否超出设定阈值,若超出,则控制无障碍踏板装置停止收回工作;若没有超过,则继续进行收回操作,直至无障碍踏板装置收回完成。
16.进一步地,为提高安全性,所述的无障碍踏板控制装置在判断出有乘客需要无障碍踏板时,则控制车辆保持在所述设定状态。
17.进一步地,为及时提醒乘客,所述控制系统还包括语音播报系统,该语音播报系统由无障碍踏板控制装置控制。
18.本发明还提供了一种车辆,包括车辆控制单元、无障碍踏板装置和车辆智能无障碍踏板控制系统所述车辆智能无障碍踏板控制系统采用本发明所述的车辆智能无障碍踏板控制系统。
附图说明
19.图1是本发明车辆智能无障碍踏板控制系统的结构原理图;
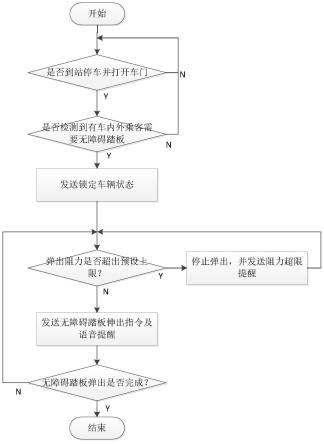
20.图2是车辆智能无障碍踏板控制系统控制无障碍踏板弹出的流程图;
21.图3是车辆智能无障碍踏板控制系统控制无障碍踏板收回流程图。
具体实施方式
22.下面结合附图对本发明的具体实施方式作进一步地说明。
23.系统实施例
24.本发明的车辆智能无障碍踏板控制系统包括图像采集装置、阻力监测装置和无障碍踏板控制装置和语音播报系统,如图1所示,图像采集装置用于安装在车门上方,用于采集车内外的乘客图像数据,包括用于采集车内乘客信息的车内摄像头和用于采集车外乘客信息的车外摄像头,这两个摄像头也可以是同一个,例如,设置一个360度的摄像头;阻力监测装置用于采集智能踏板装置伸出或者收回过程中的阻力,阻力监测装置采用的阻力传感器类型和安装位置没有特殊的要求,阈值可以设置为正常值的130%左右;例如可以通过如下方式实现:阻力传感器可选择电流传感器,安装在驱动电机处,当踏板伸出或收回过程中遇到阻力时工作电流会增大,可通过检测电机过载电流来判断是否需要停止工作;阻力监测装置和图像采集装置均与无障碍踏板控制装置连接,无障碍踏板控制装置对图像采集装置采集到的乘客门内外的乘客图像信息进行分析检测,判断是否有乘客需要无障碍踏板协助上下车,并根据检测结果控制语音播报系统和无障碍踏板装置。其中,无障碍踏板控制装置通过基于深度学习的目标检测算法对图像采集装置采集到图像进行分析,识别图像中车门前特殊人群类别(例如:乘坐轮椅的乘客、拄拐杖的人、行动不便的老人等);深度学习算法通过大量标注的数据去进行训练,能够实现对图像中的目标物进行识别并进行分类。本实施例中的无障碍踏板装置采用的是基于电控伸缩的无障碍踏板装置,因此,无障碍踏板控制装置只需控制无障碍踏板装置的驱动电机即可。
25.具体而言,无障碍踏板控制装置只在车辆处于停车且车门打开的车辆状态信息时才进入判断和控制的工作流程,其中上述车辆状态信息可由车辆自身的控制器(如整车控制器或者自动驾驶系统)发送给无障碍踏板控制装置,也可由无障碍踏板控制装置直接根据相应的传感器数据来判断,无障碍踏板控制装置只有在车链属于停车且车门打开的状态是才进入后续的判断控制流程。
26.本发明的车辆智能无障碍踏板控制系统控制无障碍踏板弹出的流程如图2所示,具体过程如下:无障碍踏板控制装置首先判断车辆是否处于停车且车门打开的状态;若处于,则控制图像采集装置采集车内外的乘客图像数据,并根据该图像数据判断车内外是否有乘客需要无障碍踏板;在判断出有乘客需要无障碍踏板时,则向车辆(如整车控制器或者智能驾驶系统)发送车辆状态锁定指令,以防止在无障碍踏板伸出的过程中发生车辆行走或者车门关闭等意外状态,同时控制无障碍踏板装置的驱动电机进行无障碍踏板装置的伸出操作;为防止无障碍踏板弹出过程中由于误判引起的人身伤害,在无障碍踏板装置的伸出操作过程中,实时检测弹出阻力,判断阻力是否超出设定阈值,若超出,则控制无障碍踏板装置停止弹出或者控制无障碍踏板装置收回,并发送阻力超限的语音提醒,方便有人进行及时检查,如果阻力值恢复到允许的范围内时,会重新控制弹出操作;若没有超过,则控
制无障碍踏板装置的进行弹出操作,直至无障碍踏板装置弹出操作完成,并在弹出过程中给语音播报系统发送语音提醒:正在伸出无障碍踏板装置,请乘客耐心等待,以告知需要使用的乘客。
27.本发明的车辆智能无障碍踏板控制系统控制无障碍踏板收回的流程如图3所示,具体过程如下:无障碍踏板控制装置首先根据图像采集装置采集的车内外的乘客图像数据,判断乘客是否均已完成上下车;在判断出所有乘客均已完成上下车时,判断无障碍踏板装置的状态,若无障碍踏板装置处于伸出状态时,则控制无障碍踏板装置的驱动电机进行收回操作,并实时检测收回阻力,判断该收回阻力是否超出设定阈值,若超出,则控制无障碍踏板装置的驱动电机停止工作,并发送阻力超限的语音提醒,方便有人进行检查;若没有超过,则继续进行收回操作,直至无障碍踏板装置收回完成;并在无障碍踏板装置收回完成后,向车辆发送解锁车辆状态的指令,即车辆可以从车门打开、车辆停车的状态中解除。
28.车辆实施例
29.本发明的车辆可以是常规的乘运车辆,如公交车、客车等,也可以是无人驾驶的微循环车或公车车等。如图1所示,本发明的车辆包括车辆控制单元(如整车控制器或者无人驾驶系统)、无障碍踏板装置和车辆智能无障碍踏板控制系统,车辆智能无障碍踏板控制系统包括图像采集装置、阻力监测装置和无障碍踏板控制装置和语音播报系统。该车辆具体的工作过程已在系统实施例中进行了详细说明,这里不再赘述。
30.方法实施例
31.本发明在车辆处于设定状态时,获取车内外乘客的图像数据,根据车内外乘客的图像数据判断车内外是否有乘客需要无障碍踏板;当判断出有乘客需要无障碍踏板时,控制无障碍踏板进行弹出操作,并在无障碍踏板弹出操作中实时检测弹出阻力,若弹出阻力大于设定阈值时,则控制无障碍踏板停止弹出操作,若弹出阻力不大于设定阈值,则控制无障碍踏板弹出直至完全弹出。具体实现过程已在系统的实施例中进行了说明,这里不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1