一种新能源商用车扭矩仲裁控制方法及控制系统与流程
1.本发明涉及新能源汽车控制技术领域,具体涉及一种新能源商用车扭矩仲裁控制方法及控制系统。
背景技术:
2.新能源汽车整车控制器的开发技术日渐成熟,其中巡航控制、制动回馈、驾驶员扭矩需求、蠕行等功能涉及对驱动电机的扭矩请求。当单个功能运行时,控制算法对驱动电机的扭矩请求可以做到响应及时、平顺,但当多个功能来回切换时,多半会出现扭矩抖动或响应延时等不良现象。
3.传统的整车控制器在处理各个扭矩需求时,各个功能模块相互独立,当多个扭矩请求功能同时触发时,各功能模块计算的扭矩请求之间相互切换,导致请求扭矩会产生跳变,进而导致车辆发生抖动等异常现象。
技术实现要素:
4.本发明为解决现有技术存在多个扭矩请求功能同时触发时,各功能模块计算的扭矩请求之间相互切换,导致请求扭矩会产生跳变,进而导致车辆发生抖动等异常现象等问题,提供一种新能源商用车扭矩仲裁控制方法及控制系统。
5.一种新能源商用车扭矩仲裁控制方法,该方法由以下步骤实现:
6.控制器上电默认进入零扭矩控制状态;
7.进入零扭矩状态的条件为:
8.控制器上电默认进入零扭矩控制状态,调用零扭矩模块,输出零扭矩;
9.当前处于正转速行驶状态,若档位为非d档且当前需求扭矩为0,跳转至零扭矩模块,输出零扭矩;
10.当前处于回馈状态,若回馈状态标志位为0且当前需求扭矩为0,跳转至零扭矩模块,输出零扭矩;
11.当前处于负转速行驶状态,若档位非r档且当前需求扭矩=0,零扭矩模块,输出零扭矩。
12.一种新能源商用车扭矩仲裁控制系统,该系统包括正转速行驶模块、负转速行驶模块、回馈处理模块、零扭矩模块和数据合并模块;
13.所述正转速行驶模块用于正转速状态事件触发后输出加速扭矩;
14.所述负转速行驶模块用于负转速状态事件触发后输出负转速扭矩;
15.所述零扭矩模块用于零扭矩状态事件触发后输出零扭矩;
16.所述回馈模块用于回馈状态事件触发后回馈扭矩;
17.所述加速扭矩、负转速扭矩、零扭矩以及回馈扭矩均通过数据合并模块进行合并后,输出至动力电机,作为目标扭矩输出。
18.本发明的有益效果:本发明所述的扭矩仲裁方法,解决各功能状态优先级问题,防
止多个功能模块同时发生时,切换顺序错误;解决各扭矩请求在功能模块切换时,扭矩不发生跳变,实车无抖动现象。
19.本发明所述的扭矩仲裁方法,使得当多个扭矩请求功能来回切换时,经过扭矩仲裁机制,最后平稳准确的给出请求扭矩,使得车辆可控并运行平顺。
20.本发明的整车能量控制方法在处理各个扭矩需求时,各个功能模块相互独立,当多个扭矩请求功能同时触发时,各功能模块计算的扭矩请求之间可相互平滑切换,改善车辆因扭矩跳变而发生抖动等异常现象。
附图说明
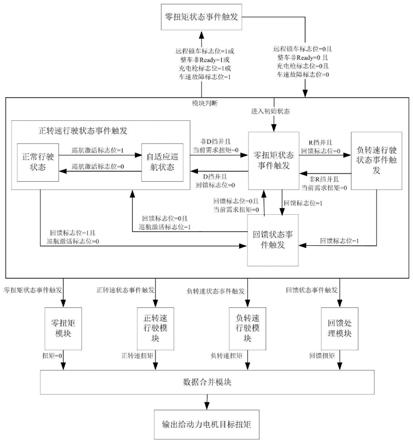
21.图1为本发明所述的一种新能源商用车扭矩仲裁控制方法中扭矩仲裁状态框图。
具体实施方式
22.结合图1说明本实施方式,一种新能源商用车扭矩仲裁控制系统,该系统包括正转速行驶模块、负转速行驶模块、回馈处理模块、零扭矩模块和数据合并模块;
23.所述正转速行驶模块用于正转速状态事件触发后输出加速扭矩;
24.所述负转速行驶模块用于负转速状态事件触发后输出负转速扭矩;
25.所述零扭矩模块用于零扭矩状态事件触发后输出零扭矩;
26.所述回馈模块用于回馈状态事件触发后回馈扭矩;
27.所述加速扭矩、负转速扭矩、零扭矩以及回馈扭矩均通过数据合并模块进行合并后,输出至动力电机,作为目标扭矩输出。
28.本实施方式中,所述正转速状态事件触发的条件为:
29.当前状态为零扭矩状态事件触发,若挡位为d挡,且回馈标志位为0,则转至正转速行驶状态事件触发,触发正转速行驶模块输出加速扭矩;
30.当前状态为回馈状态事件触发,若回馈标志位为0且巡航激活标志位为1,则转至正转速行驶状态事件触发,触发正转速行驶模块输出加速扭矩。
31.在进入正转速行驶状态后,根据巡航激活标志位来判断是否由正常驾驶状态进入巡航状态,或由巡航状态退出至正常驾驶模式;如果巡航激活标志位=1,则从正常行驶状态进入自适应巡航状态;如果巡航激活标志位=0,则从自适应巡航状态进入正常行驶状态。
32.本实施方式中,所述负转速状态事件触发的条件为:
33.当前状态为零扭矩状态事件触发,挡位为r档且回馈标志位为0,则转至负转速行驶状态事件触发,触发负转速行驶模块输出负转速扭矩。
34.本实施方式中,所述零扭矩状态事件触发的条件为:
35.控制器上电默认进入零扭矩状态事件触发,调用零扭矩模块,输出零扭矩;
36.当前处于正转速行驶状态事件触发,若挡位为非d档且当前需求扭矩为0,则转至零扭状态事件触发,输出零扭矩;
37.当前处于回馈状态事件触发,若回馈状态标志位为0且当前需求扭矩为0,则转至零扭矩模块,输出零扭矩。
38.本实施方式中,所述回馈状态事件触发条件为:
39.当前状态为正转速行驶状态事件触发,若回馈标志位为1,且巡航激活标志位为0,进入回馈状态事件触发,触发制动回馈处理模块;
40.当前状态为零扭矩状态事件触发,若回馈标志位为1,进入回馈状态事件触发,触发制动回馈处理模块,输出回馈扭矩;
41.当前状态为负转速行驶状态事件触发,若回馈标志位为1,则进入回馈状态事件触发,触发制动回馈处理模块,输出回馈扭矩。
42.本实施方式根据回馈标志位、巡航标志位、逻辑档位、滤波后的扭矩判断出当前状态应当为零扭矩状态、负转速行驶状态、回馈状态或正转速行驶状态(正向驱动状态和巡航状态)中的任一状态。根据回馈标志位、巡航标志位、逻辑档位、加速扭矩值、巡航扭矩值、回馈扭矩值判断各种状态的扭矩输出值。最后判断远程锁车标志位是否有效、整车是否非ready、是否插枪、是否有车速故障,若任意一个标志位有效,则进入零扭矩状态,否则根据整车当前状态进入相应的扭矩模块。
43.本实施方式中,将扭矩请求相关模块如巡航控制、制动回馈、驾驶员扭矩需求、蠕行等功能先编写成独立的函数模块,并分别输出巡航开启有效标志位、制动回馈开启有效标志位、驾驶员档位信号以及蠕行开启有效标志位;增加零扭矩控制模块,当各扭矩请求模块触发时,按照优先级进行切换(回馈的优先级最高,正转和反转同优先级别),当驾驶员请求的档位发生变化时,需先经过零扭矩控制模块,再跳转进相应的控制模块零扭矩判断模块;如:正反转状态不能直接跳转,必须先经过零扭矩模块,根据档位请求再进入相应的状态。
44.具体实施方式二、本实施方式为具体实施方式一所述的一种新能源商用车扭矩仲裁控制系统的控制方法,该方法的具体过程为:控制器上电默认进入零扭矩控制状态。
45.控制器上电默认进入零扭矩控制状态,调用零扭矩模块,输出零扭矩;
46.当前处于正转速行驶状态,若档位为非d档且当前需求扭矩为0,跳转至零扭矩模块,输出零扭矩;
47.当前处于回馈状态,若回馈状态标志位为0且当前需求扭矩为0,跳转至零扭矩模块,输出零扭矩;
48.当前处于负转速行驶状态,若档位非r档且当前需求扭矩=0,零扭矩模块,输出零扭矩;
49.本实施方式中,进入正转速行驶状态的条件:
50.当前状态为零扭矩状态,若档位为d档,且回馈标志位=0,跳转至正转速行驶状态;
51.当前状态为回馈状态,若回馈标志位为0且巡航激活标志位为1,跳转至正转速行驶状态;
52.在进入正转速行驶状态后,根据巡航激活标志位来判断是否由正常驾驶状态进入巡航状态,或由巡航状态退出至正常驾驶模式;
53.本实施方式中,进入负转速行驶状态的条件:
54.当前状态为零扭矩状态,档位为r档且回馈标志位为0,跳转至负转速行驶状态。
55.本实施方式中,进入回馈状态的条件:
56.当前状态为正转速行驶状态,回馈标志位为1,且巡航激活标志位为0,进入回馈状
态,触发制动回馈扭矩计算模块;
57.当前状态为零扭矩状态,回馈标志位为1,进入回馈状态,触发制动回馈扭矩计算模块;
58.当前状态为负转速行驶状态,回馈标志位为1,进入回馈状态,触发制动回馈扭矩计算模块。
59.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
60.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1