用于控制载具(vechicle)工作特性(诸如离地间隙)的方法与流程
用于控制载具(vechicle)工作特性(诸如离地间隙)的方法
1.发明背景
2.本发明特别涉及适于在接触面上移动而不滑动或滚动的悬浮载具,诸如气垫或磁悬浮载具。这种类型的载具在高速(通常高于100km/h)时悬浮,但通常具有可展开的起落架,使其能够以较低的速度停在地面上。在悬浮阶段,离地间隙完全通过操作悬浮装置来管理。但在地面支撑阶段期间,在起落架的阻尼器及其车轮轮胎(如果配备了它们)的下沉之后,随着悬浮装置的作用被释放,离地间隙逐渐减小。离地间隙随后取决于不再由悬浮装置补偿的载具重量的比例,也取决于外部条件,诸如环境温度、阻尼器中摩擦部件的磨损状态、其调节等。对于某些载具,特别是对于列车在部分真空中的隧道中移动的“超环线”类型而言,重要的是将离地间隙精确保持在给定高度,尤其是使诱导阻力最小化并保证载具的稳定性,并且对于以经减小的间隙在轨道上移动的载具,避免载具与轨道之间发生任何接触。
3.为此目的,众所周知,为起落架配备适配成改变其行为(例如其空载长度)的致动装置,并控制这些致动装置以便保持与地面接触的载具的离地间隙相对于起落架恒定。例如,fr2912725公开了直升机的起落架的减震器气缸的闭环控制,以便使离地间隙取决于给定的离地间隙设定点。然而,尽管适用于落地飞行器,但这种控制系统由于致动装置相对较慢的响应而不能在载具以可观的速度移动时,尤其是在制动或加速阶段期间确保保持精确的接地间隙。
4.发明目的
5.本发明旨在提供一种用于借助于起落架控制在接触面上行进的载具的工作特性(离地间隙、垂直加速度等)的方法,该起落架允许对影响载具的工作条件的变化进行快速响应。
技术实现要素:
6.鉴于实现这一目标,,提出了一种用于借助于至少一个起落架来控制停在接触面上的载具的工作特性(例如离地间隙或加速度)的方法,该起落架包括致动装置,该致动装置被适配成当起落架与接触面接触时改变起落架的行为,由此所述方法通过因变于工作特性和给定设定点之间的偏差生成旨在用于致动装置的命令,使载具的工作特性取决于该设定点。根据本发明,控制系统包括使用起落架看到的负载的估计来生成命令的修改,以便使负载中的变化所引起的偏差变化最小化。
7.因此,本发明的控制方法利用对起落架所承载的负载的估计来检测起落架的变化,并修改致动装置的控制以修改起落架的行为,以便使工作特性估计和设定点之间的偏差最小化,从而减少这种负载变化对工作特性的影响。如果控制系统未根据本发明来修改,则偏差可能会暂时达到对载具正常工作或对乘客舒适性有害的显著值。使用负载估计,其变化立即表明起落架的工作条件的变化,允许非常快速地适配控制,以便避免载具工作特性和设定点之间的重大偏差。
8.应注意,可根据负载单元进行的测量得出该估计。
9.例如,如果起落架看到的负载由于悬浮、制动或加速装置的作用减小而突然增加,则起落架的致动装置的控制将非常迅速地改变,以便甚至在观察到离地间隙与离地间隙设定点之间的显著偏差之前,致动装置快速改变起落架的行为,以便补偿因负载突然增加而导致的离地间隙可预测的瞬时减小,从而减少离地间隙返回到离地间隙设定点所需的时间。以此方式,载具将不会因致动装置相对缓慢而导致在离地间隙中的任何有害变化。
10.根据本发明的第一实施例,通过添加因变于起落架看到的估计负载所确定的校正控制来修改控制。
11.优选地,校正控制由实现起落架行为的模型并预测起落架对起落架看到的负载变化的反应的预测算法来确定。
12.根据本发明的第二实施例,控制由控制器确定,该控制器的特性依赖于起落架看到的估计负载。
13.优选地,控制器是pid类型,其特征在于增益因变于起落架看到的负载估计来确定,例如借助于负载估计的参数函数或值表格。
14.在优选实施例中,受控的工作特性是载具的离地间隙。优选地,控制是用于起落架的电动机,该电动机被适配成改变起落架的负载/下沉特性。
15.附图的简要说明
16.在参考附图的同时,阅读本发明的方法的具体实施例的以下描述将更好地理解本发明,其中:
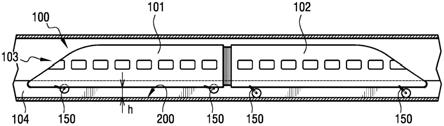
[0017]-图1a是磁悬浮列车形式的载具的示意图,该列车在横跨中央轨道并借助于起落架支承在接触面上在部分真空下的隧道中行进;
[0018]-图1b是图1a中的设备的正视图;
[0019]-图2是安装在图1中的载具的车厢之一上的起落架之一的示意图,其解说了被适配成修改起落架的负载/下沉特性的致动装置;
[0020]-图3是根据本发明的方法的第一特定实现模式的图1中的载具的离地间隙的控制系统的框图;
[0021]-图4是根据本发明的方法的第一特定实现模式的图1中的载具的离地间隙的控制系统的框图。
[0022]
本发明的详细描述
[0023]
本发明在这里被描述为应用于如图1a和1b中解说的车厢101和102的列车100形式的磁悬浮载具。列车100在部分排空空气的隧道103中行进,以便最小化空气动力阻力,其跨越能够生成适用于悬浮列车100的磁场的中央轨道104。这里不详细介绍磁悬浮装置,因为它们不构成本发明的核心。
[0024]
对于其中悬浮力不足以完全支撑列车100的低速而言,每节车厢借助于起落架150停留在接触面200上,起落架150一起形成载具的起落架,每个起落架可在起落架远离接触面200的缩回位置(如对于车厢101所示)和其中起落架单元150与接触面200接触并能够向地面传送未通过悬浮力补偿的车厢重量的一部分(以下简称负载)的展开位置(如对于车厢102所示)之间展开。
[0025]
如图2中所见,这里每个起落架150包括摆臂151,其铰接在相关车厢上并在其自由端承载容纳用于旋转的一个或多个车轮153的轴152。每个车轮153配备有制动器和轮胎
154,用于在接触面200上行驶。减震器气缸155耦合在车厢和摆臂151之间。减震器气缸155具有铰接在车厢上的主体156,并且其中阻尼器159的气缸158可滑动安装,并可借助于电动机160(这里借助于电动机160旋转驱动的螺钉161)在主体156中移动。
[0026]
杆162可滑动地安装在阻尼器159的气缸158中。以其本身已知的方式,阻尼器159可以在负载下被压缩,以悬挂车厢并抑制其垂直移动。滑动杆162的端部直接铰接到摆臂151上。
[0027]
对于阻尼器159在主体156中的给定位置,起落架的下沉以及因此的离地间隙h(此处在接触面200和以虚线表示的车厢主体下部之间测量)取决于车轮传送给地面的负载p,其表示未借助于悬浮补偿的车厢重量部分,该重量部分因负载转移、尤其是由于载具的加速或制动而增加或减少。如果电机160将阻尼器159推向地面,则减震器气缸155的空载长度将增加,这将导致起落架的降低下沉量,并且因此对于相同负载p而言离地间隙更大。因此,电动机160(以及用于将电机轴的旋转移动转换为阻尼器159的气缸158的位移的装置,包括螺钉161)构成能够在起落架与接触面接触时修改起落架的负载/下沉特性,并因此修改起落架的行为的致动装置。
[0028]
注意,通过将阻尼器159完全缩回主体156中,电机160也可被用于将起落架缩回至缩回位置。
[0029]
在以下详述的实现模式中,本发明旨在实现一种控制系统,以便在起落架处于展开位置并且车厢经由起落架停留在接触面上时,为起落架的电动机160生成命令u,使得车厢的离地间隙h尽可能接近离地间隙设定点hc,本发明包括因变于起落架看到的负载p的估计来修改电机的命令u。
[0030]
根据本发明的第一实施例,如图3中所解说的,实现了一种反馈回路控制系统300,其中由pid型控制器301根据离地间隙设定点hc和使用估计器302获得的离地间隙h的估计h
est
之间的偏差ε来生成用于电机160的命令u。估计器302通过使用诸如阻尼器下沉之类的数据或通过使用传感器以直接测量离地间隙来估计离地间隙。在向电机160发送命令u以调整阻尼器159在主体156中的位置之前,通过添加在校正器303(实现传递函数)的帮助下确定的校正命令u
corr
来修改根据本发明的命令u,该校正器303接收在估计器304的帮助下获得的起落架看到的负载p的估计p
est
作为输入。估计器304通过利用诸如阻尼器159的内部压力之类的数据,或通过使用例如力传感器或应变计测量起落架150看到的力或应力来估计地面负载。校正命令u
corr
使得通过预测因负载p的突然变化所导致的偏差ε的预测增加来修改命令u成为可能。因此,可以快速改变命令u,以补偿起落架对负载p的突然变化的反应的一定缓慢,从而将偏差ε的变化最小化,以及因此将离地间隙的变化最小化。
[0031]
校正控制优选由校正器303借助于实现起落架的行为模型并预测起落架对负载p变化的反应的预测算法确定。
[0032]
根据图4中解说并且其中对先前实现模式共用的元素具有增加一百的标记的本发明的方法的第二实现模式,控制系统400仍然是反馈回路类型,并且还实现pid控制器401以根据离地间隙设定点hc和离地间隙估计h
est
之间的偏差ε来确定命令u。与第一实施模式不同,起落架看到的负载p的估计p
est
现在不被用于开发校正控制,而是用于修改pid校正器401使用的增益k
p
、ki、kd(分别是pid的比例、积分和微分分量的增益)。为此,使用适配器403,其基于负载估计p
est
来适配增益k
p
、ki、kd,以便在使偏差ε变化最小化、并且因此使离地
间隙变化最小化的方向上改变根据本发明的命令u。
[0033]
增益k
p
、ki、kd优选通过使用参数函数或值表格,或通过实现滑动模式控制,根据负载估计p
est
来实时计算。
[0034]
本发明不限于刚刚描述的内容,而是涵盖了权利要求书范围内的每个替换方案。
[0035]
具体而言,尽管本发明已在应用于在部分真空下的隧道中移动的磁悬浮载具中进行了描述,但本发明适用于其他类型的载具,包括气垫载具,或直升机或旋翼机,其中当飞行器通过其起落架停留在地面上时,(诸)电机能够补偿飞行器的一些重量。
[0036]
尽管用于改变起落架的负载/下沉特性的致动装置采用能够改变减震器气缸的空载长度的电机的形式,但致动装置也可以采用其他形式,诸如适于改变减震器充气压力的装置,或适于将液压流体排入或相反地排出阻尼器的流体传递装置,或当起落架与地面接触时能够改变起落架负载/下沉特性、以及更一般地说,起落架的行为的任何其他装置。
[0037]
尽管本发明的两个实施例中所解说控制器是pid,但本发明不限于使用这种类型的控制器,并且可以使用任何其他类型的控制器,例如bang-bang控制器或甚至h∞控制器。
[0038]
尽管本文详述的方法使离地间隙取决于离地间隙设定点,但本发明的方法可被用于控制其他载具工作特性,诸如加速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1