在同步阶段期间预测设定转速的用于操控原动机的方法与流程
1.本发明要求于2019年11月20日提交的法国申请n
°
1912979的优先权,该申请的内容(文本、附图和权利要求)在此通过引用并入本文。
2.本发明涉及一种在同步阶段期间预测设定转速的用于操控原动机的操控方法。本发明特别有利地应用于尤其是用于机动车辆的电动牵引链或混动牵引链。
背景技术:
3.以本身已知的方式,机动车辆的牵引链可包括牵引机器(尤其是电动机),该牵引机器装配在所述机动车辆的后车桥上,并且与减速器且与用于使所述牵引电动机与所述后车桥联结和断联的联结和断联装置相关联。所述减速器能够使所述电动机的非常高的旋转速度与所述车辆的车轮的旋转速度兼容。
4.所述联结和断联装置能够使所述机动车辆布置有两个行驶模式,即:第一模式,其中,所述电动机经断联并且等待与所述后车桥联结;和第二模式,其中,所述电动机与所述后车桥联结以便可向所述机动车辆的车轮提供额外的电力。
5.在实施使所述牵引机器与所述车辆的车桥连结之前,实施同步阶段,该同步阶段用于使所述原动机的转速与车轮的转速同步,在需要时直到(le cas
é
ch
é
ant
à
)所述减速器的邻近的降速比(rapport de d
é
multiplication pr
è
s)。
6.如图1上可见,在该同步阶段期间,对应于所期望看到所述原动机所能达到的目标转速n_phys_c的转速设定值n_cns经发送至所述原动机的转速控制器。
7.由于所述牵引链的多计算机式电子架构包括与所述原动机的转速控制器分开的全局监控器,在由所述监控器生成所述设定转速n_cns的时刻与由所述转速控制器接收和处理所述设定转速n_cns以操纵所述原动机的时刻之间可能存在延迟时间t_ret。
8.当转速设定值n_cns变化以例如遵循车辆加速时,延迟t_ret在经获得的实际转速n_phys_r上造成引发称作“拖延误差(erreur de)”的误差n_er。在所述原动机与爪式离合器连结的情况下,这种拖延误差可能降级所述车辆的驾驶乐趣,甚至会阻止所述爪式离合器的闭合。
技术实现要素:
9.本发明旨在通过提供一种用于操控装配在机动车辆的配备有车轮的车桥上的原动机的操控方法来有效地克服这些缺点,所述原动机与联结和断联装置相关联,所述联结和断联装置能够选择性地使所述原动机与所述机动车辆的车桥联结或断联。在所述原动机的转速与所述车轮的转速的同步阶段期间且在需要时直到邻近的降速比,所述方法包括:
[0010]-确定步骤,所述确定步骤用于基于由所述原动机待达到的目标转速根据时间的导数并且基于与所述设定转速的获得有关的延迟时长确定所述原动机的设定转速,以及
[0011]-发送步骤,所述发送步骤用于把先前确定的设定转速发送至所述原动机的转速控制器。
[0012]
由此,通过考虑到所述延迟时长以及所述目标转速的导数来制定所述转速设定值,本发明在与所述车辆的车轮的同步阶段期间能够精确地掌控所述原动机的转速,并因此能够保证所述联结和断联装置的闭合以及所述机动车辆的驾驶乐趣。
[0013]
根据实施例,所述原动机的设定转速n_cns基于以下关系进行确定:
[0014]
n_cns=n_phys_c+t_ret
×
d/dt(n_phys_c)
[0015]-n_phys_c是由所述原动机待达到的目标转速,
[0016]-t_ret是与所述设定转速的获得有关的延迟时长。
[0017]
量n_cns、n_phys_c和t_ret是带符号量,并因此是正的或负的都可以。
[0018]
根据实施例,与所述设定转速的获得有关的延迟时长对应于在以下时刻之间的时长:
[0019]-由监控器生成所述设定转速的时刻,和
[0020]-由与所述监控器分开的转速控制器接收和处理所述设定转速的时刻。
[0021]
根据本发明的方法可经实施用于所述原动机的转速的正变化。
[0022]
根据本发明的方法可经实施用于所述原动机的转速的负变化。
[0023]
本发明还旨在提供一种计算机,所述计算机包括存储软件指令的存储器,所述软件指令用于实施如上文限定的用于操控原动机的操控方法。
[0024]
本发明还旨在提供一种机动车辆,所述机动车辆包括:
[0025]-配备有车轮的车桥,
[0026]-装配在所述车桥上的原动机,
[0027]-与所述原动机相关联的联结和断联装置,所述联结和断联装置能够选择性地使所述原动机与所述车桥联结或断联,
[0028]-如上文限定的计算机。
[0029]
所述原动机例如是牵引电动机。
[0030]
所述联结和断联装置例如是爪式离合器。
[0031]
该车辆包括例如减速器,所述联结和断联装置与所述减速器相关联。
[0032]
所述车桥例如是所述车辆的后车桥。
附图说明
[0033]
通过阅读本发明下文中的详细说明和附图,将更好地理解本发明,在所述附图中:
[0034]-已描述的图1是所述原动机的实际转速、所期望的目标转速和由根据现有技术的方法无延迟补偿地生成的设定转速的根据时间的演变的曲线图;
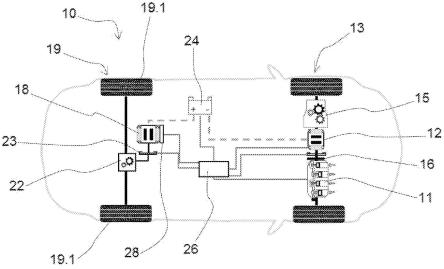
[0035]-图2是实施根据本发明的操控方法的用于机动车辆的牵引链示例的示意图;
[0036]-图3是所述原动机的实际转速、所期望的目标转速和由根据本发明的方法有延迟补偿地生成的设定转速的根据时间的演变的曲线图。
具体实施方式
[0037]
图2示出了用于机动车辆的牵引链10,该牵引链包括装配在机动车辆的车桥13(尤其是前车桥)上的热力发动机11和牵引电动机12。热力发动机11例如是四气缸式热力发动机。在变型中,热力发动机11当然可包括不同数量的气缸,尤其是三个气缸或多于四个气
缸。热力发动机11可与起动器相关联,以确保该热力发动机的冷起动。
[0038]
热力发动机11借助于离合器16与变速箱15连结。变速箱15的输出轴借助于差速器(未示出)与车轮连接。变速箱15例如是自动变速箱(尤其是具有行星齿轮系的自动变速箱)。
[0039]
牵引电动机12布置在离合器16与变速箱15之间。由此,当电动机12确保了车辆以电动行驶模式进行牵引时,离合器16可使牵引电动机12相对于热力发动机11隔离。
[0040]
原动机18借助于减速器22以及用于使牵引电动机18与后车桥19联结和断联的联结和断联装置23装配在所述机动车辆的后车桥19上。原动机18在该示例中是第二牵引电动机。在变型中,原动机18可采用热力发动机或液压发动机的形式。
[0041]
联结和断联装置23可采用打开状态和闭合状态,在处于所述打开状态时,牵引电动机18相对于后车桥19断连,在处于所述闭合状态时,牵引电动机18与后车桥19连结。联结和断联装置23优选地是具有爪式离合器的装置。在变型中,联结和断联装置23是离合器。
[0042]
电池24与牵引电动机12且与牵引电动机18电气联接。电池24此处是两个牵引电动机12、18所共用的。在变型中,使用分别与每个牵引电动机12、18相关联的电池24。
[0043]
第一牵引电动机12和第二牵引电动机18可具有高运行电压(尤其大于48伏特的电压)。
[0044]
牵引电动机12、18能够把来自电池24的电能转变成机械能量,以确保所述车辆的牵引。牵引电动机12、18还能够以发电机模式运行,在该发电机模式中,电动机12、18把机械能量转变成电能,该电能能够尤其是在再生制动阶段期间为电池24再充电。
[0045]
这种架构使所述车辆能够以纯热力模式、混动推进模式、纯电动推进模式、4x4混动模式和4x4电动模式运行。
[0046]
监控器26确保了对于牵引链10的不同组成部件的操控。该监控器26可采用计算机的形式,该计算机包括存储软件指令的存储器,所述软件指令用于实施根据本发明的用于操控牵引链10的操控方法。
[0047]
更确切地,在原动机18的转速与车桥19的车轮19.1的转速的同步阶段期间且在需要时直到邻近的降速比,监控器26确定原动机18的设定转速n_cns,如图3上所示。“转速”理解成对应元件的旋转速度。
[0048]
设定转速n_cns基于由原动机18待达到的目标转速n_phys_c根据时间的导数并且基于与设定转速n_cns的获得有关的延迟时长t_ret进行确定。待达到的目标转速n_phys_c对应于车轮19.1的速度,在需要时直到邻近的降速比。
[0049]
监控器26接下来把先前确定的设定转速n_cns发送至原动机18的转速控制器28,所述转速控制器与监控器26分开。监控器26和转速控制器28借助于通信网络(尤其是can(英文为controller area network)或flexray(注册商标)类型的网络)彼此之间通信。
[0050]
延迟时长t_ret对应于在由监控器26生成设定转速n_cns的时刻与由转速控制器28接收和处理设定转速n_cns以便操纵原动机18的时刻之间的时长。
[0051]
更确切地,设定转速n_cns基于以下关系进行确定:
[0052]
n_cns=n_phys_c+t_ret
×
d/dt(n_phys_c)
[0053]-n_phys_c是由原动机18待达到的目标转速,
[0054]-t_ret是与所述设定转速的获得有关的延迟时长。
[0055]
由此,由于考虑到了所期望的转速n_phys_c的变化(导数),设定值n_cns经预测以便使最终调节误差最小化。
[0056]
原动机18的实际转速n_phys_r由此与所期望的目标转速n_phys_c重合。
[0057]
在图3上,n_phys_c_grad对应于所期望的目标转速n_phys_c的根据时间的变化,并且,在设定转速n_cns与所期望的目标转速n_phys_c之间的偏差n_cns_off等于n_phys_c_grad与延迟时长t_ret之间的乘积。
[0058]
对于原动机18的正转速变化(在车辆加速的情况下)或负转速变化(在车辆减速的情况下),根据本发明的方法都可实施。
[0059]
在变型中,牵引链10的架构可倒置,也就是说,牵引电动机12和热力发动机11装配在所述机动车辆的后车桥19上,而牵引电动机18以及减速器22和联结和断联装置23装配在所述机动车辆的前车桥13上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1