驻车控制方法及驻车控制装置与流程
驻车控制方法及驻车控制装置
1.本申请是申请日为2016年10月4日、申请号为201680089843.0、发明名称为“驻车控制方法及驻车控制装置”的发明专利申请的分案申请。
技术领域
2.本发明涉及驻车控制方法及驻车控制装置。
背景技术:
3.关于该项技术,已知有通过来自车外的操作而使车辆驻车(停车)的驻车控制装置(专利文献1)。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2014/162753号
7.但是,在专利文献1中并没有任何关于室内存在乘客和不存在乘客的情况下的驻车方法的讨论。
技术实现要素:
8.本发明要解决的课题在于,以对应了室内存在乘客和不存在乘客的情况下的控制内容而使车辆驻车(停车)的课题。
9.为实现上述目的,本发明对应车辆的室内是否存在乘客的判断结果而对车辆进行控制,从而解决上述课题。
10.根据本发明,能够以对应了室内存在乘客和不存在乘客的情况下的控制内容而使车辆驻车。
附图说明
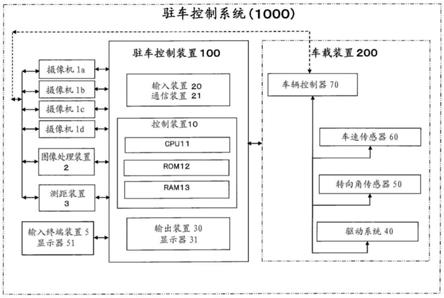
11.图1是表示本发明的本实施方式的驻车控制系统的一例的块构成图;
12.图2是表示本实施方式的驻车控制系统的控制顺序的一例的流程图;
13.图3是表示本实施方式的计算目标路径时的参数的一例的图;
14.图4a是表示利用第一、第二参数计算出的驻车路径的曲率的图;
15.图4b是表示利用第一、第二参数计算出的驻车路径的一例的图;
16.图5是表示本实施方式的计算目标速度时的参数的一例的图;
17.图6是表示减速时的目标速度的变化的图;
18.图7是用于说明直至驻车目标地点的距离边距的设定例的图;
19.图8是用于说明本实施方式的第一模拟条件的图;
20.图9a的(a)~(e)是表示本实施方式的第一参数与驻车时间的关系的图;
21.图9b的(a)~(e)是表示本实施方式的第二参数与驻车时间的关系的图;
22.图10是用于说明本实施方式的第二模拟条件的图;
23.图11a的(a)~(e)是表示本实施方式的第一参数与驻车时间的关系的图;
24.图11b的(a)~(e)是表示本实施方式的第二参数与驻车时间的关系的图。
具体实施方式
25.以下,基于附图对本发明的实施方式进行说明。本实施方式中,以将本发明的驻车(停车)控制装置适用于车载的驻车控制系统的情况为例进行说明。驻车控制装置也可以适用于可与车载装置进行信息交换的可移动的终端装置(智能手机、pda:personal digital assistant等设备)。另外,本发明的驻车(停车)控制方法能够在后述的驻车控制装置中使用。
26.图1是本发明的一个实施方式的具有驻车控制装置100的驻车控制系统1000的块图。本实施方式的驻车控制系统1000具备摄像机1a~1d、图像处理装置2、测距装置3、输入终端装置5、驻车控制装置100、车辆控制器70、驱动系统40、转向角传感器50、以及车速传感器60。本实施方式的驻车控制装置100基于从输入终端装置5输入的操作指令而控制使车辆移动(驻车)到停车位(驻车位)的动作。
27.输入终端装置5是可以拿到车辆外部的携带型终端装置。输入终端装置5接受用于控制车辆的操作指令的输入。输入终端装置5具备通信机,可以与驻车控制装置100进行信息的交换。输入终端装置5经由通信网络将在车外输入的操作指令发送给驻车控制装置100,从而将操作指令输入到驻车控制装置100。输入终端装置5使用含有固有识别记号的信号与驻车控制装置100进行通信。
28.输入终端装置5具备显示器51。显示器51提示输入接口以及各种信息。当显示器51为触摸屏型的显示器的情况下,具有接受操作指令的功能。
29.输入终端装置5也可以是接受本实施方式的驻车控制方法中所用的操作指令的输入,并向驻车控制装置100发送操作指令的安装了应用程序的智能手机、pda:personal digital assistant等携带型设备。
30.本实施方式的驻车控制装置100具备控制装置10、输入装置20、输出装置30。驻车控制装置100的各构成为进行相互的信息交换而通过can(controller area network)等其它的车载局域网连接。
31.输入装置20具备通信装置21。通信装置21接收从外部的输入终端装置5传送来的操作指令,并输入到输入装置20。输入装置20接受所接收的操作指令。向外部的输入终端装置5输入操作指令的主体可以是人(用户、乘客、驾驶员、驻车设施的作业人员),也可以是驻车设施侧的机器(管理装置)。输入装置20接受室内乘客输入的操作指令。输入装置20向控制装置10发送所接受的操作指令。
32.输出装置30包含显示器31。输出装置30向驾驶员传递驻车控制信息。本实施方式的显示器31为具备输入功能和输出功能的触摸式显示器。在显示器31具备输入功能的情况下,显示器31作为输入装置20发挥作用。
33.本实施方式的驻车控制装置100的控制装置10是特殊的计算机,其具备:收纳有驻车控制程序的rom12、通过执行收纳于该rom12中的程序而作为本实施方式的驻车控制装置100发挥作用的动作回路的cpu11、以及作为可访问的存储装置发挥作用的ram13。
34.本实施方式的驻车控制程序是执行判断车辆的室内是否存在乘客,并根据判断的
结果控制车辆使其驻车的控制过程的程序。该程序通过本实施方式的驻车控制装置100的控制装置10执行。
35.本实施方式的驻车控制装置100具备从外部发送操作指令并控制车辆的动作,从而使车辆驻车到规定的停车位的远程控制功能。此时,乘客可以不存在于室内,也可以存在于室内。如上所述,也可以在室内经由输入装置20输入操作指令。
36.本实施方式的驻车控制装置100可以是自动地进行转向操作、加速操作、制动操作的自动控制型。驻车控制装置100也可以是自动地进行转向操作,而驾驶员进行加速操作、制动操作的半自动型。
37.本实施方式的驻车控制程序中,可以是用户任意选择目标停车位,也可以是驻车控制装置100或者驻车设施侧自动设定目标停车位。
38.本实施方式的驻车控制装置100的控制装置10具备执行操作指令获取处理、乘客的存在确认处理、以及驻车控制处理的功能。通过用于实现各处理的软件和上述硬件的协调动作而执行上述各处理。
39.本实施方式的控制装置10在执行基于从车辆的内外所获取的操作指令而控制车辆使其驻车的驻车控制方法时,利用判断车辆的室内是否存在乘客并与判断结果对应的控制方法控制车辆使其驻车。控制装置10判断室内是否存在乘客,生成与是否存在乘客对应的驻车路径,计算出与是否存在乘客对应的控制信息,并基于这些使车辆驻车到规定的停车位。
40.由于是根据车辆的室内是否存在乘客的判断结果而控制车辆使其驻车,因此,能够通过分别适用于室内存在乘客的情况的要求、和室内不存在乘客的情况的要求的方法而使其驻车。例如,在室内存在乘客的情况下,要求车辆的动作的变化量要少,不会使室内的乘客感到不适感。另一方面,在室内不存在乘客的情况下,则无需考虑乘客的不适感。该情况下,要求驻车时间短,流畅地驻车。由于驻车控制装置100是以与室内是否存在乘客对应的控制内容执行驻车处理,因此,无论是在乘客存在/不存在的哪种情况下,均能够对应其各自的要求。下车的乘客处于进行车辆的驻车操作的状态或者等待驻车完成的状态。无论是在哪一种状态下,乘客均因驻车而使得行动受到限制,因此,优选这样的时间要短。尤其是在天气炎热/寒冷的情况、以及天气下雨/下雪/刮强风等的情况下,优选驻车处理没有延迟、流畅地完成。
41.图2是表示本实施方式的驻车控制系统1000执行的驻车控制处理的控制过程的流程图。驻车控制处理开始的触发并没有特别的限制,可以将驻车控制装置100的起动开关被操作作为触发。
42.本实施方式的驻车控制装置100具备基于从车外所获取的操作指令而将车辆v自动地移动到停车位的功能。
43.在步骤101中,本实施方式的驻车控制装置100的控制装置10分别获取通过安装于车辆v的多个位置的摄像机1a~1d所拍摄的摄影图像。并没有特别的限定,但通常在车辆v的前格栅部配置摄像机1a,在后保险杠的附近配置摄像机1d,在左右门的后视镜的下部配置摄像机1b、1c。作为摄像机1a~1d可以使用具备视野大的广角透镜的摄像机。摄像机1a~1d拍摄车辆v周围的停车位的边界线以及停车位周围存在的物体。摄像机1a~1d为ccd摄像机、红外线摄像机以及其它的摄像装置。
44.在步骤101中,控制装置10通过安装于车辆v的多个位置的测距装置3分别获取测距信号。
45.测距装置3可以设置在与摄像机1a~1d相同的位置,也可以设置在不同的位置。测距装置3可以使用毫米波雷达、激光雷达、超声波雷达等的雷达装置或者声呐装置。测距装置3基于雷达装置的接收信号检测出物体是否存在、物体的位置、物体的大小、以及直至物体的距离。物体包含车辆周围的设置物、行人、其它车辆、停车车辆等。该接收信号用于判断停车位是否空着(是否在驻车中)。另外,障碍物的检测也可以使用利用摄像机1a~1d的立体运动技术。
46.在步骤102中,驻车控制装置100的控制装置10在图像处理装置2中生成俯视图像。图像处理装置2基于所获取的多个摄影图像,生成从车辆v的上方的假想视点观察包含车辆v以及该车辆v驻车的停车位的周围的状态的俯视图像。也可以不生成俯视图像而直接从步骤101进入步骤103。
47.在步骤103中,控制装置10检测出可驻车的停车位。控制装置10基于摄像机1a~1d的摄影图像检测出白线。白线是规定停车位的边框(区域)的边界线。控制装置10对摄影图像进行边缘检测,并基于亮度差(对比度)检测出停车位。控制装置10在检测出停车位之后,利用测距装置3/图像处理装置2的检测数据并按照以下的可驻车条件检测空着的停车位。控制装置10检测出停车位中的空车(其它车辆没有驻车)且可导出用于完成驻车的路径的停车位作为可驻车车位。可导出路径是指不与障碍物(包括驻车车辆)相干涉且在路面坐标中描绘出路径的轨迹。用于控制车辆的正确的驻车路径是在目标停车位设定完成之后进行。
48.在步骤104中,控制装置10将可驻车车位发送给驻车控制装置100的显示器31以及输入终端装置5,并在显示器51中显示。可驻车车位可以与基于摄影图像的俯视图像重叠显示。
49.接着,与输入终端装置5进行通信,执行操作指令获取处理。在步骤105中,控制装置10判断是否输入有目标停车位。控制装置10基于直接输入到输入装置20中的操作指令判断是否输入有目标停车位。
50.目标停车位是通过自动驾驶使车辆驻车的停车位,是自动驾驶中的目标位置。目标停车位经由输入终端装置5输入。例如,在显示器51为触摸式的显示器的情况下,用户通过触摸希望的停车位的部分而能够选择一个目标停车位。所选择的目标停车位的识别信息被发送到驻车控制装置100,输入到控制装置10。在步骤105中,在确定一个停车位的操作指令被输入到输入终端装置5的情况下,则将该停车位设为目标停车位。直到输入了目标停车位为止,控制流程返回到步骤104,等待操作指令的输入。操作指令包含驻车控制装置100的起动、目标停车位的选择、驻车控制的执行指令中的任意一个。
51.在步骤106中,执行判断室内是否存在乘客的存在确认处理。控制装置10判断乘客是否存在于室内。控制装置10基于设置在座位的座面的落座传感器的检测信号判断乘客的存在/不存在。控制装置10也可以基于从用户输入的已下车意思的信息、远程控制模式开始的信息、以及驻车控制装置100的起动信息中的任意一个判断乘客的存在/不存在。也可以基于设置在室内的摄像机、体感传感器等检测信号判断乘客的存在/不存在。
52.控制装置10在操作指令是从车辆的车外获取的情况下,也可以判断为车辆的室内
不存在乘客。在操作指令从车辆的外部输入的情形,室内不存在乘客的可能性高。因此,控制装置10根据操作指令从车辆的外部输入的情况可以推定室内不存在乘客。根据停车场的运行方式不同,也存在乘客和操作者不是同一个人的情况,因此,该推定处理能够确定适用于每个驻车处理。通过在操作指令为从车辆的车外获取的情况下判断为车辆的室内不存在乘客,从而无需利用车辆侧的检测信息(落座传感器的输出信号等)而能够判断乘客的存在与否。
53.对应步骤106的判断结果,计算驻车路径。本实施方式在计算适用于乘客不存在于室内的情况的驻车路径时,提供了以下的方法。
54.(1)在判断为车辆的室内不存在乘客的情况下,与判断为车辆的室内存在乘客的情况相比,控制装置10计算出曲率以及曲率变化率较大的驻车路径。当行驶在曲率等较大的驻车路径的情况下,可预测为车辆的动作变得较大。在判断为车辆的室内不存在乘客的情况下,允许车辆的动作变得较大,并计算短距离的驻车路径。由于能够使驻车路径变短,因此,能够迅速地进行驻车处理。
55.(2)在判断为车辆的室内不存在乘客的情况下,与判断为车辆的室内存在乘客的情况相比,控制装置10计算出从驻车开始到完成为止所需的驻车时间较短的驻车路径。在判断为车辆的室内不存在乘客的情况下,优先迅速地进行驻车处理。为了缩短驻车时间,允许路径长度的缩短、曲率以及曲率变化率的增加(车辆的动作及其变化量变大)。能够进行缩短驻车时间且迅速的驻车处理。
56.(3)在判断为车辆的室内不存在乘客的情况下,与判断为车辆的室内存在乘客的情况相比,控制装置10计算出短距离的驻车路径。在判断为车辆的室内不存在乘客的情况下,优先迅速地进行驻车处理。为了缩短驻车时间,允许曲率以及曲率变化率的增加(车辆的动作及其变化量变大)。能够进行缩短驻车时间且迅速的驻车处理。
57.(4)控制装置10使用将驻车所需时间的长短和车辆动作的流畅度作为加权参数的评价函数进行驻车路径的计算。车辆动作的流畅度可以根据车辆动作的变化较小(变化量较小)来评价。在判断为车辆的室内不存在乘客的情况下,与判断为车辆的室内存在乘客的情况相比,控制装置10较高地设定驻车所需时间长短的加权参数,与判断为车辆的室内存在乘客的情况相比,控制装置10较低地设定车辆动作流畅度的加权参数。即,在判断为车辆的室内不存在乘客的情况下,牺牲车辆动作的流畅度而优先实现缩短驻车时间。
58.控制装置10使用上述评价函数对所求出的驻车路径进行评价。在室内存在乘客的情况下,控制装置10允许最大曲率等变大而计算出更短的路径。关于驻车路径的评价方法(评价函数)没有特别的限定,可以适当地应用申请时已知的方法。
59.本实施方式中,车辆动作的流畅度可以利用纵向速度跃度、横向速度跃度以及偏航跃度中的任意一个以上而求出。跃度(jeck)是指加加速度,是影响乘客的乘坐感觉的因素。另外,作为评价项目的驻车所需时间的长短也可以作为驻车路径距离的长短。因为驻车路径距离的长短影响驻车所需时间的长短。
60.在判断为车辆的室内不存在乘客的情况下,通过将驻车所需时间长短的加权参数相对较高地设定,将车辆动作流畅度的加权参数相对较低地设定,而能够计算出优先缩短驻车时间的驻车路径。
61.返回图2,在步骤106中,在判断为存在乘客的情况下进入步骤107,在判断为不存
在乘客的情况下进入步骤121。
62.在步骤107中,读取用于存在乘客情况的驻车路径计算用的第一参数。该第一参数用于后续步骤108的第一驻车路径的计算。在步骤121中,读取用于不存在乘客情况的驻车路径计算用的第二参数。该第二参数用于后续步骤122的第二驻车路径的计算。
63.图3表示了用于驻车路径计算的参数的一例。如图3所示,各参数包含用于室内存在乘客的情况的第一参数和用于室内不存在乘客的情况的第二参数。在步骤106的判断之后,在步骤121中读取第二参数。
64.参数包含驻车路径的长度、驻车路径的最大曲率、驻车路径的最大曲率变化率、以及上限转向速度中的任意一个以上。
65.关于路径的长度,与第一参数lr1相比,第二参数lr2设定为较短的值。在乘客不存在于室内的情况下,利用第二参数lr2计算出相对较短的驻车路径。关于最大曲率,与第一参数mr1相比,第二参数mr2设定为较大的值。在乘客不存在于室内的情况下,利用第二参数mr2计算出相对弯道较大的驻车路径。关于最大曲率变化率,与第一参数cr1相比,第二参数cr2设定为较大的值。在乘客不存在于室内的情况下,利用第二参数cr2计算出相对曲率不连续的(变化量较大)的驻车路径。
66.本实施方式中,用于车辆的目标路径的计算的包含最大曲率、最大曲率变化率、以及上限转向速度的参数中的任意一个以上的参数,如下所述进行设定。与用于判断为室内存在乘客的情况的第一参数相比,控制装置10较高地设定用于判断为室内不存在乘客的情况的第二参数,并计算出驻车路径。
67.控制装置10通过使包含最大曲率、最大曲率变化率、以及上限转向速度的参数变大,而计算出更短的驻车路径。通过缩短驻车路径,从而能够缩短驻车所需时间。
68.图4a表示了车辆在驻车路径移动时的时间经过中的曲率变化。虚线图形mr1为利用第一参数计算出的驻车路径r1的曲率,实线图形mr2为利用第二参数计算出驻车路径r2的曲率。如该图所示,利用第二参数的实线图形mr2所示的最大曲率mx2为比利用第一参数的虚线图形mr1所示的最大曲率mx1大的值。另外,关于从原点至最大值的倾斜程度所示的最大曲率变化率,利用第二参数的实线图形mr2的最大曲率变化率cr2为比利用第一参数的虚线图形mr1所示的最大曲率变化率cr1大的值。
69.图4b表示了利用第一参数计算出的驻车路径r1和利用第二参数计算出的驻车路径r2。如该图所示,驻车路径r2成为比驻车路径r1曲率更大的路径,因此,能够缩短其整个过程的距离。由于驻车路径的距离变短,因此,驻车所需时间也能够缩短。
70.参数包含作为第一加权的驻车所需时间的长短、和作为第二加权的车辆动作的流畅度。关于作为第一加权的驻车时间的长短,第二参数tvr2设定为比第一参数tvr1更大的值。在乘客不存在于室内的情况下,利用第二参数tvr2可计算出驻车时间更短的驻车路径。关于作为第二加权的车辆动作的流畅度,第二参数sr2设定为比第一参数sr1更小的值。在乘客不存在于室内的情况下,利用第二参数sr2可计算出车辆动作的流畅度损失(最大曲率、最大曲率变化率较大)的驻车路径。
71.控制装置10根据步骤106的判断结果计算控制信息。
72.本实施方式中,作为计算适用于乘客不存在于室内的情况的控制信息的方法,提供了以下的方法。
73.(1)在判断为室内不存在乘客的情况下,与判断为室内存在乘客的情况相比,控制装置10计算出车辆的动作更大的控制信息。控制装置10根据控制信息使车辆沿着驻车路径移动。在判断为室内不存在乘客的情况下,允许车辆的动作变大,优先迅速地进行驻车处理。车辆的动作变大(加速度、减速度、偏航率、转向量、转向速度、横向加速度、以及跃度较大),可更快速地移动,从而能够缩短驻车时间。
74.(2)在判断为室内不存在乘客的情况下,与判断为室内存在乘客的情况相比,控制装置10计算出缩短从驻车开始到完成为止所需的驻车时间的控制信息。在判断为室内不存在乘客的情况下,优先迅速地进行驻车处理。允许速度、加速度、减速度、偏航率、转向量、转向速度、横向加速度、以及跃度等与车辆的动作对应的值变大,缩短驻车时间。
75.(3)在判断为室内不存在乘客的情况下,与判断为室内存在乘客的情况相比,控制装置10提高车辆的速度。在判断为室内不存在乘客的情况下,优先迅速地进行驻车处理。通过较高地设定车速,能够缩短驻车时间。
76.(4)控制装置10将驻车所需时间的长短和车辆动作的流畅度、以及作为加权参数的评价函数用于控制信息的计算处理。在判断为车辆的室内不存在乘客的情况下,与判断为车辆的室内存在乘客的情况相比,控制装置10较高地设定驻车时间长短的加权参数,与判断为车辆的室内存在乘客的情况相比,控制装置10较低地设定车辆动作流畅度的加权参数。由此,在判断为车辆的室内不存在乘客的情况下,能够缩短驻车时间。再有,在判断为室内存在乘客的情况下,能够使驻车时的车辆动作变得更流畅,从而能够抑制赋予乘客的不适感。
77.(5)在判断为室内不存在乘客的情况下,控制装置10将使车辆停止的驻车完成地点设为车辆与路边石相接触的位置。当车辆的轮胎与路边石相接触时,接触的力发挥作用而使得车辆前后动。该动作与速度有关,表示规定的模式。控制装置10监控车辆的动作,并将检测到该模式的时刻判断为车辆的轮胎与路边石相接触。将该时刻作为到达车辆驻车完成地点的时刻进行检测。通过基于车辆动作的变化检测出车辆的轮胎是否与路边石相接触,从而能够更高精度地判断车辆是否已到达驻车完成地点。
78.由于当轮胎与路边石碰撞时车辆会产生摇晃,因此乘客会感觉到不适感。在室内存在乘客时,控制装置10从路边石设置规定的边距而在路边石的跟前(上游侧)使车辆停止。这是为了不使乘客感觉到不适感。另一方面,在室内不存在乘客时,相比乘客的乘坐感觉更优先缩短驻车时间。通过将车辆与路边石相接触的位置作为使车辆停止的驻车完成地点,从而能够缩短驻车时间。
79.控制装置10利用评价函数对计算出的控制信息进行评价。评价函数将驻车所需时间的长短、和车辆动作的流畅度作为评价项目。基于这些评价项目之和评价控制信息。对于各评价项目赋予加权以实现评价的准确。关于目标车速等控制信息的评价方法(评价函数)没有特别的限定,可以适当地应用申请时已知的方法。
80.本实施方式中,控制装置10利用纵向速度跃度、横向速度跃度以及偏航跃度中的任意一个以上计算出车辆动作的流畅度。跃度是加加速度,是影响乘客的乘坐感觉的因素。可以将车辆动作的流畅度作为与乘客的乘坐感觉相关的值进行对应。在室内不存在乘客的情况下,较低地设定乘客的乘坐感觉的允许水平,从而能够实现驻车时间的缩短。另外,作为评价项目的驻车所需时间的长短也可以换作驻车时的车速的高低。因为驻车时的车速的
高低影响驻车所需时间的长短。
81.控制信息是利用用于控制车辆动作的加速度、偏航率、转向量、转向速度、横向加速度等参数求出的车速等的控制命令。
82.在判断为室内不存在乘客的情况下,通过相对较高地设定驻车所需时间的长短的加权参数,且相对较低地设定车辆动作的流畅度的加权参数,而能够计算出优先缩短驻车时间的控制信息。
83.对于用于车辆的目标速度的计算且包含上限加速度、上限偏航率、上限横向加速度、上限转向速度、上限加速跃度、上限减速度、以及上限减速跃度的关于车辆动作的参数中的任意一个以上的参数,与用于判断为室内存在乘客的情况的第一参数相比,控制装置10较高地设定用于判断为室内不存在乘客的情况下的第二参数,并计算出驻车时的目标速度。
84.利用纵向速度跃度、横向速度跃度、以及偏航跃度中的任意一个以上求出车辆动作的流畅度。
85.对于与车辆动作有关的参数,通过与存在乘客时的第一参数相比较高地设定乘客不在时的第二参数,允许车辆的动作变大,从而能够缩短驻车所需时间。
86.返回到图2,对处理顺序进行说明。在判断为室内存在乘客的情况下,控制装置10在步骤109中读取控制信息计算用的第一参数。在步骤110中,控制装置10利用第一参数计算出第一控制信息。第一控制信息是用于控制将车辆移动到目标停车位时的车辆动作的信息。
87.在判断为室内不存在乘客的情况下,控制装置10在步骤123中读取控制信息计算用的第二参数。在步骤124中,控制装置10利用第二参数计算出第二控制信息。第二控制信息是用于控制将车辆移动到目标停车位时的车辆动作的信息。
88.另外,本实施方式的驻车控制方法中,可以同时执行上述利用了第一参数的驻车路径的计算处理、和利用了第一参数的控制信息的计算处理,也可以仅执行其中任意一方的计算处理。也可以在步骤106中判断为室内存在乘客的情况下,在步骤107中读取驻车路径计算用的第一参数,计算出第一驻车路径之后,进入步骤110,利用默认的参数计算出控制信息,而使车辆沿着第一驻车路径移动。也可以在步骤106中判断为室内不存在乘客的情况下,在步骤121中读取驻车路径计算用的第二参数,计算出第二驻车路径之后,进入步骤124,利用默认的参数计算出控制信息,而使车辆沿着第二驻车路径移动。即使仅缩短第二驻车路径也能够获得本申请发明的作用效果。
89.另外,也可以在步骤106中判断为室内存在乘客的情况下,不在步骤107中读取驻车路径计算用的第一参数,利用默认的参数计算出第一驻车路径之后,进入步骤109读取控制信息计算用的第一参数。在步骤110中利用第一参数计算出控制信息,使车辆沿着第一驻车路径移动。也可以在步骤106中判断为室内不存在乘客的情况下,不在步骤121中读取驻车路径计算用的第二参数,利用默认的参数计算出第二驻车路径之后,进入步骤124,利用第二参数计算出控制信息,而使车辆沿着第二驻车路径移动。即使仅使车辆的动作变大也能够获得本申请发明的作用效果。
90.图5表示了用于驻车时的控制信息计算的参数的一例。如图5所示,各参数包含用于室内存在乘客的情况的第一参数、和用于室内不存在乘客的情况下的第二参数。在步骤
106的判断之后,在步骤123中读取第二参数。
91.参数包含速度、加速度、减速度、偏航率、横向加速度、转向量、转向速度、横向加速度以及跃度中的任意一个以上,包含支配车辆动作的指标值。
92.关于上限加速度,第二参数ar2设定为比第一参数ar1更大的值。在乘客不存在于室内的情况下,利用第二参数ar2计算出相对车辆的动作较大的控制信息。关于上限减速度,第二参数dr2设定为比第一参数dr1更大的值。在乘客不存在于室内的情况下,利用第二参数dr2计算出相对车辆的动作较大的控制信息。如该图所示,关于上限偏航率(yr1、yr2)、上限横向加速度(har1、har2)、上限转向速度(srr1、srr2)、上限跃度(stjr1、stjr2)也同样。在乘客不存在于室内的情况下,利用第二参数(yr2、har2、srr2、stjr2)计算出相对车辆的动作较大的控制信息。由于允许车辆的动作变大,因此能够在短时间内完成驻车。
93.参数包含从车辆减速开始到停止为止的减速时间。该减速时间用于计算使车辆停止时的目标速度。关于与从车辆减速开始到停止为止的减速时间有关的参数,与判断为室内存在乘客的情况下的第一减速时间strr1相比,控制装置10较短地设定判断为室内不存在乘客的情况下的第二减速时间strr2而计算出驻车时的目标速度。控制装置10基于该目标速度控制车辆。在室内不存在乘客的情况下,由于较短地设定从车辆减速开始到停止为止的减速时间并求出目标速度,因此,能够缩短驻车时间。减速时间也可以表现为减速距离。
94.图6表示车辆的目标速度的时间变化。虚线图形sdr1为利用第一参数计算出的目标速度(控制信息)的时间变化,实线图形sdr2为利用第二参数计算出的目标速度(控制信息)的时间变化。比较从减速开始到驻车完成为止的时间(目标速度变为零为止的时间)。如该图所示,利用了第二参数的实线图形sdr2所示的到驻车完成为止的时间为strr2,利用了第一参数的虚线图形sdr1所示的到驻车完成为止的时间为strr1。
95.另外,关于减速开始时的倾斜度所示的最大减速度,利用第二参数的实线图形sdr2的最大减速度stjr2为比利用第一参数的虚线图形sdr1所示的最大减速度stjr1更大的值。关于车辆的动作,通过利用比第一参数更大的第二参数,能够允许车辆的动作(减速度)变大。由此,能够缩短从减速开始到驻车完成为止的时间。
96.参数包含直至车辆驻车完成地点的停止位置边距。在判断为室内存在乘客的情况下,控制装置10在从驻车完成地点起第一停止位置边距mr1的上游侧使车辆停止。在判断为室内不存在乘客的情况下,控制装置10在从驻车完成地点起第二停止位置边距mr2的上游侧或者驻车完成地点的下游侧使车辆停止。第二停止位置边距mr2为比第一停止位置边距mr1更小的值。驻车完成地点例如为路边石的位置。当将停止位置边距设定为比驻车完成地点更上游侧且更小时,则车辆与路边石相接触的可能性变高。当将停止位置边距设为零时,则车辆停止在驻车完成地点、即与路边石相接触的位置。当将停止位置边距设定在驻车完成地点的下游侧时,则车辆与路边石相接触。即,给予乘客不适感的可能性变高。在判断为室内不存在乘客的情况下,允许车辆与路边石相接触的可能性,且较短地设定到达驻车完成地点的减速时间或者在与路边石相接触时使车辆停止。
97.图7表示了直至驻车完成地点的距离和目标车速之间的关系。距离为零的位置是驻车完成地点,即路边石cr的位置。第一停止位置边距mr1设定在相对于车辆的行驶方向dr的上游侧(+x)。该情况下,第二停止位置边距mr2比第一停止位置边距mr1更短。第二停止位
置边距mr2也可以设定在相对于车辆的行驶方向dr的下游侧(
‑
x)。
98.这样,通过在路边石等驻车完成地点的上游附近或者下游侧的地点使车辆停止,允许车辆与路边石相接触,从而能够换来缩短驻车时间。
99.参数包含作为第一加权的驻车所需时间的长短、和作为第二加权的车辆动作的流畅度。关于作为第一加权的驻车时间的长短,第二参数tvr2设定为比第一参数tvr1更大的值。在乘客不存在于室内的情况下,利用第二参数tvr2可计算出驻车时间更短的控制信息。关于作为第二加权的车辆动作的流畅度,第二参数sr2设定为比第一参数sr1更小的值。在乘客不存在于室内的情况下,利用第二参数sr2可计算出损失车辆动作的流畅度的控制信息。
100.返回到图2,在室内存在乘客的情况下,在步骤110中,控制装置10利用所获取的第一参数计算出使车辆移动到目标停车位时的第一控制信息。另一方面,在室内不存在乘客的情况下,在步骤124中,控制装置10利用所获取的第二参数计算出使车辆移动到目标停车位时的第二控制信息。
101.在步骤111中,本实施方式的驻车控制装置100若输入了驻车控制处理的执行指令之后,则进入步骤112,执行驻车控制处理。
102.本实施方式的驻车控制装置100按照控制信息经由车辆控制器70控制驱动系统40以使车辆v1沿着驻车路径移动。
103.驻车控制装置100以车辆v1的行驶轨迹与所计算出的驻车路径一致的方式反馈转向装置具备的转向角传感器50的输出值,同时运算发给eps电机等车辆v1的驱动系统40的指令信号,并将该指令信号发送给驱动系统40或者控制驱动系统40的车辆控制器70。
104.本实施方式的驻车控制装置100具备驻车控制控制单元。驻车控制控制单元获取来自at/cvt控制单元的变挡信息、来自abs控制单元的车轮速度信息、来自转向角度控制单元的转向角度信息、来自ecm的发动机转速信息等。驻车控制控制单元基于上述信息对发给eps控制单元的与自动转向有关的指示信息、及发给仪表控制单元的警告等指示信息等进行运算并输出。控制装置10经由车辆控制器70获取车辆v1的转向装置具备的转向角传感器50、车速传感器60等其它的车辆具备的传感器所获取的各信息。
105.本实施方式的驱动系统40通过基于从驻车控制装置100所获取的控制指令信号的驱动,使车辆v1从当前位置移动(行驶)到目标停车位。本实施方式的转向装置为进行车辆v1向左右方向移动的驱动机构。驱动系统40中所含的eps电机基于从驻车控制装置100获取的控制指令信号驱动转向装置的转向器具备的动力转向机构而控制转向量,从而控制将车辆v1移动到目标停车位时的操作。另外,用于驻车的车辆v1的控制内容以及动作过程没有特别的限定,可以适当地应用申请时已知的方法。
106.本实施方式的驻车控制装置100,在使车辆v1沿着基于车辆v1的位置p4和目标停车位的位置计算出的路径移动到目标停车位时,加速器、制动器基于指定的控制车速(设定车速)被自动地控制,同时转向装置的操作对应车速被自动地控制。即,在本实施方式的驻车控制中,自动地进行转向器的操作以及加速器、制动器的操作。另外,本实施方式的驻车控制装置100也可以适用于驾驶员进行加速器、制动器的操作的手动驻车。
107.本实施方式的驻车控制装置100无需搭载于车辆v1上,可以进行通过从外部向车辆v1发送目标停车位的设定指令、驻车处理开始指令、驻车处理的中断、中止指令等而进行
驻车的远程控制的驻车处理。
108.进行了用于确认本实施方式的效果的模拟(仿真)。本模拟中,对应室内是否存在乘客的判断结果使用不同的参数,获得了车辆v1的动作(速度等)的曲线(profile)。图8、图9a以及图9b中表示了没有折返的驻车路径中的车辆v1的动作(速度等)的曲线,图10、图11a以及图11b表示了有折返的驻车路径中的车辆v1的动作(速度等)的曲线。
109.图8是用于说明第一模拟条件的图。使作为模型的车辆从第一位置vp1开始,沿第一路径t1移动而到达第二位置vp2。经由第二位置vp2沿第二路径t2移动并移动到第三位置vp3。第三位置vp3为目标位置pk,在此使车辆v1停车。在室内存在乘客的情况下和室内不存在乘客的情况下以相同的条件进行了模拟。模拟中,设定车道宽度:lane width[m]、停车位宽度:spot width[m]、车辆宽度:lat.[m]、驻车开始角度:init.[deg.]、驻车结束角度:fin[deg.]作为条件。根据上述这些条件确定允许的路径、动作。根据允许的路径、动作中生成最优的路径(能够以最短时间驻车的路径、动作得到控制的路径),并执行模拟。
[0110]
图9a表示了室内存在乘客的情况下的相对于时间的(a)目标速度、(b)路径的曲率、(c)剩余距离、(d)加速度、(e)偏航跃度的变化。图9b表示了室内不存在乘客的情况下的相对于时间的(a)目标速度、(b)路径的曲率、(c)剩余距离、(d)加速度、(e)偏航跃度的变化。图9a以及图9b中的traj1为关于第一路径t1的曲线,traj2为关于第二路径t2的曲线。
[0111]
对图9a和图9b的曲线进行比较。
[0112]
(1)图9b(a)所示的不存在乘客的情况的曲线的目标速度的最高值9b1比图9a(a)所示的存在乘客的情况的曲线的目标速度的最高值9a1更高地被控制。在不存在乘客的情况下,与车辆流畅地移动相比,更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0113]
(2)图9b(b)所示的不存在乘客的情况的曲线的曲率变化率9b2成为比图9a(b)所示的存在乘客的情况的曲线的曲率变化率9a2更高的值地被控制。在不存在乘客的情况下,与车辆流畅地移动相比,更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0114]
(3)图9b(c)所示的不存在乘客的情况的曲线的直至剩余距离为零(驻车完成)为止的时间9b3比图9a(c)所示的存在乘客的情况的曲线的直至剩余距离为零(驻车完成)为止的时间9a3更短地被控制。在不存在乘客的情况下,与车辆流畅地移动相比,更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0115]
(4)图9b(d)所示的不存在乘客的情况的曲线的加速度9b4的变化幅度比图9a(d)所示的存在乘客的情况的曲线的加速度9a4的变化幅度更大地被控制。在不存在乘客的情况下,与车辆流畅地移动相比,更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0116]
(5)图9b(e)所示的不存在乘客的情况的曲线的偏航跃度的最高值/变化幅度9b5比图9a(e)所示的存在乘客的情况的曲线的偏航跃度的最高值/变化幅度9a5更大地被控制。在不存在乘客的情况下,与车辆流畅地移动相比,更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0117]
图10是用于说明第二模拟条件的图。第二模拟中,驻车路径模型包含折返路径这一点与第一模拟不同。
[0118]
如图10所示,使作为模型的车辆从第一位置vp1开始,沿着第一路径t1而移动到第二位置vp2。经由第二位置vp2沿着第二路径t2后退而移动到第三位置vp3。进而,从第三位置vp3沿着第三路径t3前行而移动到第四位置vp4。经由该第四位置vp4沿着第四路径t4后
退而移动到第四位置vp4。
[0119]
第四位置vp4为目标位置pk,在此使车辆停车。在室内存在乘客的情况下和室内不存在乘客的情况下以相同的条件进行了模拟。模拟中,设定车道宽度:lane width[m]、停车位宽度:spot width[m]、车辆宽度:lat.[m]、驻车开始角度:init.[deg.]、驻车结束角度:fin[deg.]作为条件。根据上述这些条件确定允许的路径、动作。根据允许的路径、动作中生成最优的路径(能够以最短时间驻车的路径、动作得到控制的路径),并执行模拟。
[0120]
图11a表示了室内存在乘客的情况下的相对于时间的(a)目标速度、(b)路径的曲率、(c)剩余距离、(d)加速度、(e)偏航跃度的变化。图11b表示了室内不存在乘客的情况下的相对于时间的(a)目标速度、(b)路径的曲率、(c)剩余距离、(d)加速度、(e)偏航跃度的变化。图11a以及图11b中的traj1为关于第一路径t1的曲线,traj2为关于第二路径t2的曲线,traj3为关于第三路径t3的曲线,traj4为关于第四路径t4的曲线。
[0121]
对图11a和图11b的曲线进行比较。
[0122]
(1)图11b(a)所示的不存在乘客的情况的曲线的目标速度的最高值11b1比图11a(a)所示的存在乘客的情况的曲线的目标速度的最高值11a1更高地被控制。在不存在乘客的情况下,与车辆流畅地移动相比更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0123]
(2)图11b(b)所示的不存在乘客的情况的曲线的曲率变化率11b2成为比图11a(b)所示的存在乘客的情况的曲线的曲率变化率11a2更高的值地被控制。在不存在乘客的情况下,与车辆流畅地移动相比更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0124]
(3)图11b(c)所示的不存在乘客的情况的曲线的直至剩余距离为零(驻车完成)为止的时间11b3比图11a(c)所示的存在乘客的情况的曲线的直至剩余距离为零(驻车完成)为止的时间11a3更短地被控制。在不存在乘客的情况下,与车辆流畅地移动相比更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0125]
(4)图11b(d)所示的不存在乘客的情况的曲线的加速度11b4的变化幅度比图11a(d)所示的存在乘客的情况的曲线的加速度11a4的变化幅度更大地被控制。在不存在乘客的情况下,与车辆流畅地移动相比更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0126]
(5)图11b(e)所示的不存在乘客的情况的曲线的偏航跃度的最高值/变化幅度11b5比图11a(e)所示的存在乘客的情况的曲线的偏航跃度的最高值/变化幅度11a5更大地被控制。在不存在乘客的情况下,与车辆流畅地移动相比更优先迅速地执行驻车,因此,能够缩短驻车时间。
[0127]
本发明的实施方式的驻车控制方法,可以用于以上所述的驻车控制装置中,因此,能够发挥以下的效果。本实施方式的驻车控制装置100如上所述地构成并动作,因此,能够发挥以下效果。
[0128]
[1]根据本实施方式的驻车控制方法,能够以对应车辆的室内是否存在乘客的判断结果的内容对车辆进行控制。由此,能够通过适应相对于室内存在乘客的情况下的驻车控制的要求、和相对于室内不存在乘客的情况下的驻车控制的要求的双方的方法使车辆驻车。根据本实施方式的驻车控制方法,在室内存在乘客的情况下,执行车辆的动作的变化量较小、不会使乘客感觉到不适感的驻车控制,在室内不存在乘客的情况下,则执行驻车时间较短、流畅的驻车控制。根据本实施方式的驻车控制方法,通过计算出与乘客是否存在的判断相对应的驻车路径,或者通过计算出与乘客是否存在的判断相对应的控制信息,而能够
进行充分满足室内存在乘客的情况下的要求、和室内不存在乘客的情况下的要求的双方的驻车处理。
[0129]
[2]根据本实施方式的方法,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为车辆的室内不存在乘客的情况下,以驻车时间变得更短的方式控制车辆。由此,在室内不存在乘客的情况下,能够执行驻车时间缩短且流畅的驻车控制。
[0130]
本实施方式的方法中的驻车时间,在行驶同一路径的情况下,因车辆的室内是否存在乘客而有所不同。另外,也可以将这里的驻车时间换作驻车时的行驶距离在同样的情况下,因车辆的室内是否存在乘客而有所不同。另外,对应车辆的室内是否存在乘客的判断结果而控制车辆使其驻车,因此能够利用分别适用于室内存在乘客的情况的要求、和室内不存在乘客的情况的要求的方法进行驻车。另一方面,在室内不存在乘客的情况下,无需考虑乘客的不适感。该情况下,追求驻车时间缩短且流畅的驻车。驻车控制装置100根据与室内是否存在乘客对应的控制内容执行驻车处理,因此,无论在乘客存在/不存在的任何一种情况下,都能够对应各自的要求。下车后的乘客处于进行车辆的驻车操作的状态或者等待驻车完成的状态。无论在任何一种状态下,均优选乘客因驻车而行动受到限制这样的时间(乘客等待的时间)较短。尤其是天气炎热/寒冷的情况、以及天气下雨/下雪/刮强风等的情况下,优选驻车处理没有延时且流畅地完成。
[0131]
[3]根据本实施方式的方法,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为车辆的室内不存在乘客的情况下,预测车辆的动作变大,计算出曲率以及曲率变化率较大的驻车路径。在车辆的室内不存在乘客的情况下,相比车辆的动作变大而更优先能够迅速地进行驻车处理。通过允许车辆的动作变大而能够计算出更短距离的驻车路径。由于能够缩短驻车路径,因此,能够迅速地进行驻车处理。
[0132]
另外,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为室内不存在乘客的情况下,计算出车辆的动作变大的控制信息。在判断车辆的室内不存在乘客的情况下,允许车辆的动作变大而优先迅速地进行驻车处理。车辆的动作变大(车速、加速度、减速度、偏航率、横向加速度、跃度、转向量、转向速度较大)的情况下,与其换来的是能够更加快速地移动驻车路径。由于能够缩短驻车所需的驻车时间,因此,能够迅速地进行驻车处理。
[0133]
[4]根据本实施方式的方法,与判断为车辆的室内存在乘客的情况下相比,在判断为车辆的室内不存在乘客的情况下,计算出从驻车开始到完成为止所需的驻车时间可缩短的驻车路径。在判断为车辆的室内不存在乘客的情况下,优先迅速地进行驻车处理。为了缩短驻车时间,而允许路径长度的缩短、曲率以及曲率变化率变大(车辆的动作及其变化量变大),换来的是实现驻车时间的缩短,因此,能够迅速地进行驻车处理。
[0134]
另外,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为车辆的室内不存在乘客的情况下,优先迅速地进行车辆的驻车控制。为了缩短驻车时间,而允许车速、加速度、减速度、偏航率、横向加速度、跃度、转向量、转向速度、横向加速度、跃度等车辆的动作量变大。由于能够缩短驻车时间,因此,能够迅速地进行驻车处理。
[0135]
[5]根据本实施方式的方法,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为车辆的室内不存在乘客的情况下,计算出距离较短的驻车路径。在判断为车辆的室内不存在乘客的情况下,优先迅速地进行驻车处理。代替允许曲率以及曲率变化率
的增加,能够缩短驻车距离。其结果是能够缩短驻车时间。
[0136]
[6]根据本实施方式的方法,与判断为车辆的室内存在乘客的情况下相比,控制装置10在判断为车辆的室内不存在乘客的情况下,提高驻车时的车辆的速度。在判断为车辆的室内不存在乘客的情况下,优先迅速地进行驻车处理。通过较高地设定车速,而能够缩短驻车路径的移动时间。其结果是能够迅速地进行驻车处理。
[0137]
[7]根据本实施方式的方法,在判断为车辆的室内不存在乘客的情况下,将用于计算目标路径的处理的包含最大曲率、最大曲率变化率、以及上限转向速度的第二参数设定为比车辆的室内存在乘客的情况下的用于计算目标路径的处理的第一参数更大的值。由此,能够计算出更短的驻车路径。通过缩短驻车路径的距离而能够缩短驻车所需的时间。
[0138]
[8]根据本实施方式的方法,在判断为车辆的室内不存在乘客的情况下,将用于计算目标速度的处理的包含上限加速度、上限偏航率、上限横向加速度、上限转向速度、上限加速跃度、上限减速度、以及上限减速跃度的第二参数设定为比车辆的室内存在乘客的情况下的用于计算目标速度的处理的第一参数更大的值。由此,使车辆以较快的速度移动,从而能够缩短驻车所需的时间。
[0139]
[9]根据本实施方式的方法,在判断为车辆的室内不存在乘客的情况下,较短地设定从车辆的减速开始到停止为止的减速时间而求出目标速度,因此,使减速度变高而能够相应地缩短驻车时间。
[0140]
[10]根据本实施方式的方法,在判断为车辆的室内不存在乘客的情况下,将使车辆停止的驻车完成地点设为车辆与路边石相接触的位置。因无需进行为使车辆不与路边石相撞而设定富余量的驻车控制,从而能够缩短驻车时间。
[0141]
[11]根据本实施方式的方法,基于车辆动作的变化来检测车辆的轮胎是否与路边石相接触。由此,能够精确地判断车辆是否已到达驻车完成地点。
[0142]
[12]根据本实施方式的方法,在判断为车辆的室内不存在乘客的情况下,在从驻车完成地点起第二停止位置边距mr2的更上游侧或者驻车完成地点的下游侧使车辆停止。第二停止位置mr2为比第一停止位置mr1更小的值。驻车完成地点例如为路边石的位置。当将停止位置边距相对较短地设定在驻车完成地点的上游侧时,则车辆与路边石相接触的可能性变高。当将停止位置边距设定为驻车完成地点的下游侧时,则车辆与路边石相接触。在判断为车辆的室内不存在乘客的情况下,通过在驻车完成地点(路边石)的附近使车辆停止,代替允许车辆与路边石相接触的可能性,能够缩短驻车时间。
[0143]
[13]根据本实施方式的方法,利用将驻车所需时间的长短和车辆动作的流畅度作为加权参数的评价函数对控制内容(驻车路径、控制信息)进行评价时,在判断为室内不存在乘客的情况下,相对较高地设定驻车所需时间的长短的加权参数,而相对较低地设定车辆动作的流畅度的加权参数。由此,能够计算出优先缩短驻车时间的驻车路径以及控制信息。
[0144]
[14]根据本实施方式的方法,控制装置10利用纵向速度跃度、横向速度跃度、以及偏航跃度中的任意一个以上计算出车辆动作的流畅度。跃度为加加速度,是影响乘客的乘坐感觉的因素。能够从乘客的乘坐感觉的观点考虑将车辆动作的流畅度的加权设为适当值。
[0145]
[15]根据本实施方式的方法,通过在从车辆的车外获取到操作指令的情况下判断
为车辆的室内不存在乘客,由此,无需利用车辆侧的检测信息(落座传感器的输出信息等)而能够判断乘客是否存在。
[0146]
[16]利用本实施方式的驻车控制装置100能够实施上述驻车控制方法/驻车信息的显示方法。因此,本实施方式的驻车控制装置100能够实现上述作用以及效果。
[0147]
另外,以上说明的实施方式是为容易地理解本发明而描述的,并不是用于限定本发明的记载内容。因此,上述实施方式中公开的各要素包含本发明的技术范围所属的全部的设计变更以及等同结构的主旨。
[0148]
符号说明
[0149]
1000:驻车控制系统
[0150]
100:驻车控制装置
[0151]
10:控制装置
[0152]
11:cpu
[0153]
12:rom
[0154]
13:ram
[0155]
20:输入装置
[0156]
21:通信装置
[0157]
30:输出装置
[0158]
31:显示器
[0159]
1a~1d:摄像机
[0160]
2:图像处理装置
[0161]
3:测距装置
[0162]
5:输入终端装置
[0163]
200:车载装置
[0164]
40:驱动系统
[0165]
50:转向角传感器
[0166]
60:车速传感器
[0167]
70:车辆控制器
[0168]
v1:车辆
[0169]
v2、v3:其它车辆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1