倒车影像的显示方法和系统与流程
1.本发明实施例涉及车机技术,尤其涉及一种倒车影像的显示方法和系统。
背景技术:
2.在车辆挂倒挡后,车机屏幕上除了显示倒车影像之外,还会显示倒车辅助线。倒车辅助线一般通过两条竖立的实线或虚线表示,其用来表示两后轮的模拟行进轨迹,同时还会根据方向盘的转动而偏转。
3.现有技术中,车机系统中的中央处理器(central processing unit,cpu)普遍采用安卓系统。待cpu上电并启动安卓系统内核之后,如果检测到车辆挂倒挡,会通过安卓系统实时绘制与方向盘转角对应的轨迹点,并将轨迹点生成图片与摄像头拍摄的图片融合,生成最终的倒车影像。
4.可见,现有技术需要安卓系统启动后,绘制轨迹点,经过图片生成与融合,才能显示倒车影像,导致倒车影像的流程启动较晚,使得挂倒挡后较长时间才会显示倒车影像,用户体验差。
技术实现要素:
5.本发明实施例提供一种倒车影像的显示方法和系统,以根据车辆与车后障碍物之间的距离,灵活、快速地显示倒车影像。
6.第一方面,本发明实施例提供了一种倒车影像的显示方法,所述方法应用于车机系统,所述车机系统包括视频处理器、中央处理器cpu、微控制单元mcu、摄像头、屏幕和存储器,所述方法包括:
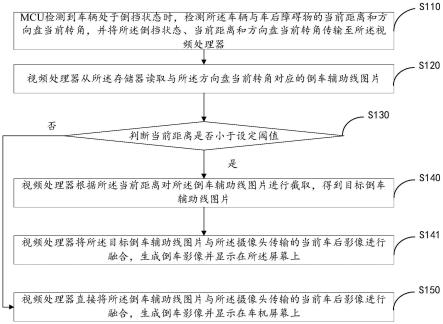
7.所述mcu检测到车辆处于倒挡状态时,检测所述车辆与车后障碍物的当前距离和方向盘当前转角,并将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器;
8.所述视频处理器从所述存储器读取与所述方向盘当前转角对应的倒车辅助线图片;其中,所述存储器存储有与所述方向盘各转角分别对应的多张倒车辅助线图片;
9.如果所述当前距离小于设定阈值,所述视频处理器根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片;
10.所述视频处理器将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在所述屏幕上。
11.第二方面,本发明实施例还提供了一种倒车影像的显示系统,包括:视频处理器,以及与所述视频处理器分别连接的中央处理器cpu、微控制单元mcu、摄像头、屏幕和存储器:
12.所述存储器用于存储与方向盘各转角分别对应的多张倒车辅助线图片;
13.所述摄像头用于对车后环境进行拍摄,得到当前车后影像,并将所述当前车后影像传输至所述视频处理器;
14.所述mcu用于检测到车辆处于倒挡状态时,检测所述车辆与车后障碍物的当前距
离和方向盘当前转角,并将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器;
15.所述视频处理器用于从所述存储器读取与所述方向盘当前转角对应的倒车辅助线图片;其中,所述存储器存储有与所述方向盘各转角分别对应的多张倒车辅助线图片;如果所述当前距离小于设定阈值,根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片;将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上。
16.本发明实施例通过mcu检测到车辆处于倒挡状态后,将倒挡状态、当前距离和方向盘转角发送给视频处理器,并由视频处理器完成倒车影像的显示,全程无需cpu参与,从而不必等待cpu系统启动,即可显示倒车影像;本实施例通过预先存储倒车辅助线图片并将图片和影像融合,省略了绘制倒车辅助线的过程,进一步提高了显示速度和用户体验;进一步的,如果当前距离小于设定阈值,视频处理器根据当前距离对倒车辅助线图片进行截取,得到目标倒车辅助线图片,从而在车辆与车后障碍物的距离较小时,可以通过实时截取预存的倒车辅助线图片,快速得到倒车辅助线变短的图片,从而能够灵活、快速地显示与距离匹配的倒车辅助线。
附图说明
17.图1a是本发明实施例提供的一种倒车影像的显示方法的流程图;
18.图1b是本发明实施例提供的车机系统的结构示意图;
19.图1c是本发明实施例提供的多张倒车辅助线图片的示意图;
20.图1d是本发明实施例提供的倒车辅助线图片的一种截图示意图;
21.图1e是本发明实施例提供的倒车辅助线图片的另一种截图示意图;
22.图1f是本发明实施例提供的倒车辅助线图片的又一种截图示意图;
23.图2a是本发明实施例提供的另一种倒车影像的显示方法的流程图;
24.图2b是本发明实施例提供的一种距离标识图片的示意图。
具体实施方式
25.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
26.图1a是本发明实施例提供的一种倒车影像的显示方法的流程图,本实施例适用于通过车机系统显示倒车影像的情况。该方法可以由车机系统执行,本实施例中的车机系统如图1b所示,包括视频处理器、cpu、微控制单元(microcontroller unit,mcu)、摄像头、屏幕和存储器。其中,cpu、mcu、摄像头和屏幕均与视频处理器连接。可选的,存储器可以内嵌于视频处理器,也可以独立于视频处理器,并与视频处理器连接。
27.具体的,存储器连接至视频处理器的串行外设接口(serial peripheral interface,spi)。摄像头连接至视频处理器的复合同步视频广播信号(composite video broadcast signal,cvbs)接口。cpu连接至视频处理器的两线式串行(inter-integrated circuit,i2c)总线接口和低电压差分信号(low-voltage differential signaling,lvds)
接口。mcu分别连接控制器域网(controller area network,can)总线和视频处理器的i2c接口。视频处理器的通过lvds接口连接车机屏幕。
28.结合图1b和图1a,倒车影像的显示方法包括:
29.s110、mcu检测到车辆处于倒挡状态时,检测所述车辆与车后障碍物的当前距离和方向盘当前转角,并将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器。
30.在一应用场景中,车机上电后,mcu从休眠或低功耗模式下被立即唤醒,cpu内核、操作系统陆续开始启动,但完成启动需要一段时间。如果驾驶员有倒车需求,往往在车机上电后就会挂倒挡并要求立即显示倒车影像。此时,mcu通过控制器域网(controller area network,can)总线检测到车辆切换到倒挡状态,并将倒挡状态发送至视频处理器,以通知视频处理器需要显示倒车影像,而不是其他视频数据。
31.用户在倒车过程中可以转动方向盘或维持方向盘的当前转角,而倒车辅助线需要根据当前转角而变化,因此还需要将方向盘当前转角发送至视频处理器。基于此,首先,车身控制模块(body control module,bcm)通过can总线将方向盘当前转角发送至mcu,mcu再将方向盘当前转角传输至视频处理器。
32.mcu还需要检测车辆与车后障碍物的当前距离。具体的,车机系统还包括测距传感器(例如雷达),用于检测所述车辆与车后障碍物的当前距离,并将所述当前距离传输至所述mcu,进而mcu将当前距离传输至视频处理器。
33.需要说明的是,mcu会实时监测车辆是否处理倒挡状态,当检测到车辆处理倒挡状态时,会实时检测当前距离和方向盘当前状态,并实时发送至视频处理器,从而视频处理器在倒车的整个过程中能够接收到多组当前距离和当前转角,并随着方向盘的转动和车辆的移动,这些数据可能是变化的。
34.s120、视频处理器从所述存储器读取与所述方向盘当前转角对应的倒车辅助线图片。
35.视频处理器在接收到倒挡状态之后,从存储器读取与所述方向盘当前转角对应的倒车辅助线图片。其中,所述存储器(例如flash存储器)存储有与所述方向盘各转角分别对应的多张倒车辅助线图片,每张倒车辅助线图片上绘制有对应方向盘转角下的左右两条倒车辅助线。
36.可选的,倒车辅助线图片可以与具体的一个转角对应,也可以与一个转角范围对应。图1c是本发明实施例提供的多张倒车辅助线图片的示意图,从左到右分别对应方向盘转角小于等于10
°
,在10
°
与20
°
之间,在20
°
与30
°
之间。
37.可选的,为了便于组织和查找,采用对应的方向盘转角为每张倒车辅助线编号,示例性的,如方向盘转角小于等于10
°
,用1号图片进行对应;方向盘转角在10
°
与20
°
之间,用2号图片进行对应;方向盘转角在20
°
与30
°
之间,用3号图片进行对应。
38.在测试阶段,获取方向盘各转角下的倒车辅助线图片,并存储至存储器中。后续,视频处理器根据当前转角从存储器中(按照编号)查找对应的倒车辅助线图片,省略了现场绘制的操作。
39.s130、判断当前距离是否小于设定阈值。如果判断结果为是,跳转到s140,如果判断结果为否,跳转到s150。
40.视频处理器在接收到当前距离后,判断当前距离是否小于设定阈值。可选的,如图
1d所示,根据倒车辅助线在倒车影像中的所占高度,确定与车尾的距离,例如2米,作为设定阈值。如果当前距离小于设定阈值,说明设定阈值内存在障碍物,倒车辅助线会对障碍物造成遮挡,如图1d所示;如果当前距离不小于设定阈值,则说明设定阈值内不存在障碍物,倒车辅助线不会对障碍物造成遮挡。
41.s140、视频处理器根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片。继续执行s141。
42.本实施例创造性地将车辆与车后障碍物的距离与倒车辅助线的长度结合起来,当倒车辅助线会对障碍物造成遮挡时,为了避免驾驶员从倒车影像中由于倒车辅助线的遮挡而看不到障碍物,视频处理器在读取到倒车辅助线图片后,会根据当前距离对倒车辅助线图片进行截取,截取后的图片称为目标倒车辅助线图片。
43.可选的,视频处理器根据所述摄像头的参数,将所述当前距离转换为所述倒车辅助线图片的高度;以及,从所述倒车辅助线图片中,按照从下至上的顺序截取与所述高度匹配的部分,作为目标倒车辅助线图片。
44.示例性的,摄像头的参数包括分辨率和焦距等,从而基于摄像头的成像原理,将现实中的当前距离转换为投影在倒车辅助线图片上的高度。由于摄像头的安装角度的原因,近处的物体会呈现在图片的下方,远处的物体会呈现在图片的上方,则按照从下至上的顺序截取与所述高度匹配的部分,作为目标倒车辅助线图片,如图1d中深色方框中的图片所示。
45.上述情况一般适用于在车后中央位置安装测距传感器的情况,即当前距离为车后中央位置与障碍物的距离,此时两条倒车辅助线均需要缩短,则如图1d所示,对倒车辅助线图片的整个高度进行截取。在另一些情况中,车后左右两侧均安装测距传感器,即当前距离包括车后左右两侧与两侧障碍物的距离。此时,需要分别判断两个当前距离是否小于设定阈值,如果左侧或右侧的当前距离与对应侧障碍物的距离小于设定阈值,则根据摄像头的参数,将当前距离转换为倒车辅助线图片的高度,并从所述倒车辅助线图片的对应侧,按照从下至上的顺序截取与所述高度匹配的部分,并与倒车辅助线图片的另一侧一起作为目标倒车辅助线图片。如果左侧和右侧的当前距离与对应侧障碍物的距离均小于设定阈值,则根据摄像头的参数,将两个当前距离分别转换为倒车辅助线图片的两个高度,并从倒车辅助线图片的对应侧,按照从下至上的顺序截取与两个高度分别匹配的部分,作为目标倒车辅助线图片。
46.如图1e所示,左侧的当前距离小于设定阈值,而右侧的当前距离不小于设定阈值,则从倒车辅助线图片的左半边,按照从下至上的顺序截取与所述高度匹配的部分,将此部分与倒车辅助线图片的右半边一起作为目标倒车辅助线图片(参见图1e中的深色方框),从而左侧的倒车辅助线缩短,右侧的倒车辅助线不变,在保证障碍物不受遮挡的情况下,使倒车辅助线完整,并从长短不一的视觉效果上,引导驾驶员调整倒车方向。
47.如图1f所示,左侧和右侧的当前距离均小于设定阈值,确定与左侧的当前距离对应的高度a,以及与右侧的当前距离对应的高度b。从倒车辅助线图片的左半边按照从下至上的顺序截取与高度a匹配的部分,从倒车辅助线图片的右半边按照从下至上的顺序截取与高度b匹配的部分,共同作为目标倒车辅助线图片(参见图1f),从而左侧和右侧的倒车辅助线均会根据障碍物的位置进行缩短,引导驾驶员调整倒车方向。
48.s141、视频处理器将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在所述屏幕上。结束本次操作。
49.摄像头安装在车后,数量为至少一个,用于对车后环境进行成像并传输至视频处理器。
50.本实施例中,视频处理器在接收到倒挡状态后,主动打开与摄像头之间的复合同步视频广播信号(composite video broadcast signal,cvbs)接口,从而接收到摄像头传输的当前车后影像。视频处理器将同一时刻获取到的当前车后影像和目标倒车辅助线图片进行融合,生成倒车影像并通过低电压差分信号(low-voltage differential signaling,lvds)接口传输至屏幕上进行显示。屏幕包括主屏、副屏和抬头显示(head up display,hud)中的至少一种。
51.具体的,将目标倒车辅助线图片与当前车后影像的对应像素的像素值相加,生成倒车影像。可选的,为了避免目标倒车辅助线图片中的非倒车辅助线部分对当前车后影像造成遮挡,倒车辅助线图片中除倒车辅助线之外的像素点的像素值设置为空。本实施例通过像素值相加的方法生成倒车影像,不需要复杂的图像处理算法,有利于加快融合速度。
52.s150、视频处理器直接将所述倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上。结束本次操作。
53.当倒车辅助线不会对障碍物造成遮挡时,直接将倒车辅助线图片与所述摄像头传输的当前车后影像进行融合。具体的,倒车辅助线图片与当前车后影像的尺寸一致,可以将对应像素的像素值相加,生成倒车影像。可选的,倒车辅助线图片中除倒车辅助线之外的像素点的像素值设置为空。
54.本发明实施例通过mcu检测到车辆处于倒挡状态后,将倒挡状态、当前距离和方向盘转角发送给视频处理器,并由视频处理器完成倒车影像的显示,全程无需cpu参与,从而不必等待cpu系统启动,即可显示倒车影像;本实施例通过预先存储倒车辅助线图片并将图片和影像融合,省略了绘制倒车辅助线的过程,进一步提高了显示速度和用户体验;进一步的,如果当前距离小于设定阈值,视频处理器根据当前距离对倒车辅助线图片进行截取,得到目标倒车辅助线图片,从而在车辆与车后障碍物的距离较小时,可以通过实时截取预存的倒车辅助线图片,快速得到倒车辅助线变短的图片,从而能够灵活、快速地显示与距离匹配的倒车辅助线。
55.在上述实施例和下述实施例中,如果所述当前距离小于设定距离,所述视频处理器进行报警处理。具体的,视频处理器在得到目标倒车辅助线图片的过程中,向mcu发送报警消息。mcu响应于报警消息驱动报警单元进行报警,例如发出报警音或在屏幕上显示报警标识。
56.在上述实施例和下述实施例中,在所述视频处理器将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上之后,还包括:所述mcu检测到所述车辆处于非倒挡状态时,向所述视频处理器发送通知消息;所述视频处理器响应于所述通知消息,停止显示所述倒车影像,并显示所述cpu传输的视频数据。
57.具体的,倒挡完成后cpu已经完成启动,则视频处理器在接收到通知消息后关闭与摄像头之间的cvbs接口,而是主动打开与cpu之间的lvds接口,并通过lvds接口接收cpu传输的视频数据,并将该视频处理显示在屏幕上,从而切换掉倒车影像。
58.本实施例在结束倒车后,通过mcu与视频处理器配合,只需要切换数据源即可切换显示cpu的视频数据,无需其他处理流程,能够加快切换流程。
59.图2a是本发明实施例提供的另一种倒车影像的显示方法的流程图,在显示倒车辅助线的同时还显示距离标识。具体包括以下操作:
60.s210、mcu检测到车辆处于倒挡状态时,检测所述车辆与车后障碍物的当前距离和方向盘当前转角,并将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器。
61.s220、视频处理器从所述存储器读取与所述方向盘当前转角对应的倒车辅助线图片;视频处理器从存储器读取与所述当前距离对应的距离标识图片;其中,所述存储器存储有与各距离分别对应的多张距离标识图片,以及与所述方向盘各转角分别对应的多张倒车辅助线图片。
62.距离标识图片中绘制有距离标识,用于对车尾与障碍物的距离进行差异化显示,可以是字符或图案。可选的,距离标识为至少一个半环形图案。例如障碍物与车后距离30cm时,对应1个半环形图案;障碍物与车后距离20cm时,对应2个半环形图案;障碍物与车后距离10cm时,对应3个半环形图案,如图2b所示。
63.s230、判断当前距离是否小于设定阈值。如果判断结果为是,跳转到s240,如果判断结果为否,跳转到s250。
64.s240、视频处理器根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片。继续执行s241。
65.s241、视频处理器将所述目标倒车辅助线图片、所述摄像头传输的当前车后影像以及所述距离标识图片进行融合,生成倒车影像。结束本次操作。
66.具体的,倒车辅助线图片和所述距离标识图片的尺寸小于等于所述当前车后影像的尺寸。倒车辅助线图片中除倒车辅助线之外的像素点的像素值设置为空;所述距离标识图片中除距离标识之外的像素点的像素值设置为空,从而避免距离标识和倒车辅助线对当前车后影像造成遮挡。
67.基于此,视频处理器分别将所述目标倒车辅助线图片和距离标识图片叠加在当前车后影像的不同设定位置处,生成倒车影像。具体的,将目标倒车辅助线图片和距离标识图片的角点或中心点分别对齐当前车后影像的不同设定位置,例如中心。需要说明的是,应在不同设定位置处叠加图片,以免目标倒车辅助线图片和距离标识图片相互遮挡。
68.在图片叠加时,可直接将目标倒车辅助线图片和距离标识图片中像素点的像素值替换当前车后影像中对应像素点的像素值,从而倒车影像中呈现原倒车辅助线和距离标识的色彩;或者还可以将目标倒车辅助线图片和距离标识图片中像素点的像素值与当前车后影像中对应像素点的像素值以设定算法计算得到结果像素,达到可以辨别倒车辅助线和距离标识的目的。
69.s250、视频处理器直接将倒车辅助线图片、所述摄像头传输的当前车后影像以及所述距离标识图片进行叠加,生成倒车影像。
70.s250与s241的叠加方式相同,区别仅在于倒车辅助线图片不同。
71.本实施例通过在车后影像上叠加倒车辅助线图片和距离标识图片,可以根据当前距离,灵活、快速地显示倒车辅助线和距离标识,提高驾驶员的使用体验。
72.如图1b所示,本发明实施例还提供一种车机系统,包括:视频处理器,以及与所述
视频处理器分别连接的中央处理器cpu、微控制单元mcu、摄像头、屏幕和存储器:
73.所述存储器用于存储与方向盘各转角分别对应的多张倒车辅助线图片;此外,还用于存储与各距离分别对应的多张距离标识图片。
74.所述摄像头用于对车后环境进行拍摄,得到当前车后影像,并将所述当前车后影像传输至所述视频处理器。
75.所述mcu用于检测到车辆处于倒挡状态时,检测所述车辆与车后障碍物的当前距离和方向盘当前转角,并将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器。
76.所述视频处理器用于从所述存储器读取与所述方向盘当前转角对应的倒车辅助线图片;其中,所述存储器存储有与所述方向盘各转角分别对应的多张倒车辅助线图片;如果所述当前距离小于设定阈值,根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片;将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上。
77.可选的,如果所述当前距离不小于所述设定阈值,所述视频处理器还用于直接将所述倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上。
78.可选的,所述视频处理器在根据所述当前距离对所述倒车辅助线图片进行截取,得到目标倒车辅助线图片时,具体用于:所述视频处理器根据所述摄像头的参数,将所述当前距离转换为所述倒车辅助线图片的高度;所述视频处理器从所述倒车辅助线图片中,按照从下至上的顺序截取与所述高度匹配的部分,作为目标倒车辅助线图片。
79.可选的,如果所述当前距离小于设定距离,所述视频处理器还用于进行报警处理。
80.可选的,在所述视频处理器将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像并显示在车机屏幕上之后,所述mcu用于检测到所述车辆处于非倒挡状态时,向所述视频处理器发送通知消息;所述视频处理器用于响应于所述通知消息,停止显示所述倒车影像,并显示所述cpu传输的视频数据。
81.可选的,在所述mcu将所述倒挡状态、当前距离和方向盘当前转角传输至所述视频处理器之后,所述视频处理器还用于从存储器读取与所述当前距离对应的距离标识图片;其中,所述存储器存储有与各距离分别对应的多张距离标识图片;相应的,视频处理器在将所述目标倒车辅助线图片与所述摄像头传输的当前车后影像进行融合,生成倒车影像时,具体用于:所述视频处理器将所述目标倒车辅助线图片、所述摄像头传输的当前车后影像以及所述距离标识图片进行融合,生成倒车影像。
82.可选的,所述倒车辅助线图片和所述距离标识图片的尺寸小于等于所述当前车后影像的尺寸;所述倒车辅助线图片中除倒车辅助线之外的像素点的像素值设置为空;所述距离标识图片中除距离标识之外的像素点的像素值设置为空;
83.视频处理器在将所述目标倒车辅助线图片、所述摄像头传输的当前车后影像以及所述距离标识图片进行融合,生成倒车影像时,具体用于:所述视频处理器分别将所述目标倒车辅助线图片和所述距离标识图片叠加在所述当前车后影像的不同设定位置处,生成倒车影像。
84.可选的,车机系统还包括测距传感器,用于检测所述车辆与车后障碍物的当前距
离,并将所述当前距离传输至所述mcu。
85.可选的,所述cpu用于在启动后向所述视频处理器传输视频数据。
86.本实施例提供的车机系统适用于上述任一实施例提供的倒车影像的显示方法,具体上述任一方法具有的技术效果。
87.注意,上述仅为本技术的较佳实施例及所运用技术原理。本领域技术人员会理解,本技术不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本技术的保护范围。因此,虽然通过以上实施例对本技术进行了较为详细的说明,但是本技术不仅仅限于以上实施例,在不脱离本技术构思的情况下,还可以包括更多其他等效实施例,而本技术的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1