一种基于域控制器的智能雨刮控制方法与流程
1.本发明涉及汽车雨刮控制技术领域,更为具体地说是指一种基于域控制器的智能雨刮控制方法。
背景技术:
2.雨刮是汽车的必备部件之一,是用来刮除附着于车辆挡风玻璃上的雨点及灰尘,以改善驾驶人的能见度,增加行车的安全性。传统的雨刮工作是由仪表控制器控制的,驾驶员通过操作雨刮拨杆来控制雨刮工作。目前,市面上也出现了一些车辆采用整车控制器对雨刮进行控制。
3.例如,公开号为cn 101797913a的中国发明专利公开了一种智能雨刮系统及其控制方法,包括智能雨刮控制器、雨刮执行器、模式开关以及雨量传感器,所述智能雨刮控制器集成在车身控制器中,通过pin脚控制雨刮执行器,雨量传感器和模式开关通过lin与智能雨刮控制器通信,集成有智能雨刮控制器的车身控制器既做can网络的节点,也做lin网络的主节点。该发明将智能雨刮控制器集成在车身控制器内部,控制器通过lin总线获取控制指令和雨量检测信息,籍此来驱动控制喷水电机、雨刮电机或雨刮伸缩电机工作,同时通过can总线将智能雨刮系统的信息传递给车辆其他模块,实现了信息共享。
4.而公开号为cn 102826065a的中国发明专利公开了一种汽车智能安全防护系统,包括整车控制器、雨量传感器、雨刮以及危险警示组件,所述整车控制器与雨量传感器、雨刮以及危险警示组件相连,在雨量传感器探测到雨量值超过预定标准时自动打开危险警示组件并自动开启雨刮。
5.cn 101797913a的发明仅是笼统介绍了控制的指令包括驱动喷水电机喷水、驱动雨刮电机高/低速转动刮片或驱动雨刮伸缩电机进行伸缩刮雨;而cn 102826065a的发明则主要是通过雨量传感器采集雨量信息,当探测雨量值超过预定标准时不但自动打开危险警示组件,开启雨刮,降低发生事故的风险。以上两个发明虽然都公开了采用整车控制器对雨刮进行控制。但是,该两个发明并未公开整车控制器如何对实际行车中的多种不同场景进行控制。为此,我们提供一种基于域控制器的智能雨刮控制方法。
技术实现要素:
6.为克服现有雨刮在控制技术上存在的不足,本发明提供一种基于域控制器的智能雨刮控制方法。
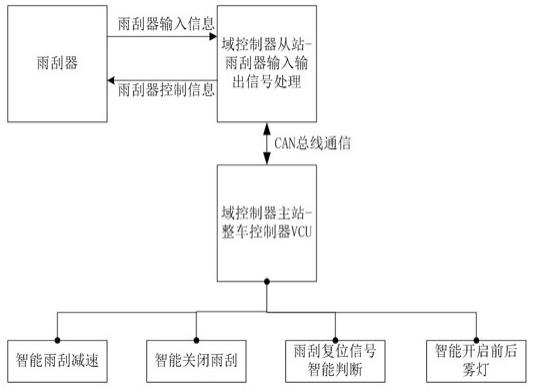
7.本发明采用如下技术方案:一种基于域控制器的智能雨刮控制方法,所述域控制器包括域控制器主站和域控制器从站,所述域控制器从站采集雨刮器输入信号,通过can总线传送给所述域控制器主站,所述域控制器主站运行智能雨刮的控制算法后,再将雨刮器控制信号通过所述域控制器从站控制雨刮工作,具体包括如下控制策略:(1)智能雨刮减速,当车辆在驱动模式下停车且拉上手刹时,使处在高速挡的雨刮自动减速到低速挡;(2)智能关闭雨刮,当车辆进入
隧道后并持续a时间,自动关闭雨刮电源;(3)雨刮复位信号智能判断,当雨刮信号失效时,将雨刮工作时电流驱动芯片的电流信号当成复位信号使用,并发出雨刮故障诊断信号;(4)智能开启前后雾灯,域控制器主站判断车辆当前车速大于设定阈值且雨刮在高速挡持续b时间,自动打开前后雾灯。
8.进一步地,上述(1)中智能雨刮减速的具体流程如下:s11、判断车辆是否为驱动模式停车且拉上手刹,若是进入步骤s12;s12、判断雨刮档位是否处在高速挡,若是进入步骤s13;s13、雨刮档位自动从高速挡变成低速挡;s14、判断车辆车速是否大于0,若是进入步骤s14;s14、雨刮档位自动从低速挡恢复成高速挡。
9.进一步地,上述(2)中智能雨刮关闭的具体流程如下:s21、在雨刮工作时,根据车上gps定位信号,域控制器主站判断车辆是否进入隧道且持续时间是否超过a,若是进入步骤s22;s22、自动关闭雨刮电源,停止雨刮工作;s23、根据gps定位信号,判断车辆是否出隧道,若是进入步骤s24;s24、雨刮自动恢复工作。
10.进一步地,上述a优选为10s。
11.进一步地,上述(3)中雨刮复位信号智能判断的具体流程如下:s31、判断雨刮复位信号是否失效,若是进入步骤s32;s32、判断雨刮是否正在运行,若是,进入步骤s33,若否进入步骤s34;s33、雨刮无复位信号无法停止;s34、开启雨刮时无复位信号,雨刮不工作;s35、将雨刮工作时电流驱动芯片的电流信号当成复位信号使用;s36、发出故障诊断信号通过域控制器从站发给仪表,声光提醒驾驶员及时检修雨刮。
12.进一步地,上述(4)中智能开启前后雾灯的具体流程如下:s41、域控制器主站判断车辆当前车速大于设定阈值且雨刮工作在高速档位持续b时间,若是进入步骤s42;s42、自动开启前后雾灯;s43、域控制器主站判断车辆当前车速小于设定阈值或雨刮工作在低速档位持续b时间,若是进入步骤s44;s44、自动关闭前后雾灯。
13.进一步地,上述b优选为60s。
14.由上述对本发明的描述可知,和现有技术相比,本发明具有如下优点:本发明通过域控制器主站和域控制器从站,并使用can通信交互信息,将雨刮器状态控制集成到整车控制器中,具体从四个行车场景中对雨刮进行控制,即:1、在驱动模式下停车且拉上手刹时,智能雨刮减速;2、车辆进入隧道后并持续a时间,智能关闭雨刮;3、雨刮信号失效时,雨刮复位信号智能判断;4、车速大于设定阈值且雨刮在高速挡持续b时间,智能开启前后雾灯。故本发明的雨刮控制方法,可以很方便的使用整车信号,不需要新增设备,可以大大缩短开发周期,减小成本,极大的方便了后续雨刮功能的扩展;而且在针对常见的几个行车场景中分别对应一个控制策略,大大减少了驾驶员的手动操作,保障了行车安全,同时减少不必要的损耗,提高了雨刮的使用寿命。
附图说明
15.图1为本发明的控制流程图。
16.图2为本发明智能雨刮减速的工作流程图。
17.图3为本发明智能关闭雨刮的工作流程图。
18.图4为本发明雨刮复位信号智能判断的工作流程图。
19.图5为本发明智能开启前后雾灯的工作流程图。
具体实施方式
20.下面参照附图说明本发明的具体实施方式。为了全面理解本发明,下面描述到许多细节,但对于本领域技术人员来说,无需这些细节也可实现本发明。对于公知的组件、方法及过程,以下不再详细描述。
21.一种基于域控制器的智能雨刮控制方法,域控制器包括域控制器主站和域控制器从站,其中,域控制器主站即整车控制器vcu,负责整车控制算法及智能雨刮控制算法的运行,而域控制器从站采集雨刮器输入信号,通过can总线传送给所述域控制器主站,所述域控制器主站运行智能雨刮的控制算法后,再将雨刮器控制信号通过所述域控制器从站控制雨刮工作,具体包括如下控制策略:(1)智能雨刮减速,当车辆在驱动模式下停车且拉上手刹时,使处在高速挡的雨刮自动减速到低速挡,避免雨刮长时间工作在高速档损坏高速档电机,同时也更节能。
22.(2)智能关闭雨刮,当车辆进入隧道后并持续a时间,自动关闭雨刮电源,出隧道后自动开启雨刮;进出隧道自动关闭开启雨刮,较少驾驶员频繁操作,提高驾驶员舒适性。
23.(3)雨刮复位信号智能判断,当雨刮信号失效时,将雨刮工作时电流驱动芯片的电流信号当成复位信号使用,并发出雨刮故障诊断信号,通过声光提醒驾驶员及时检修雨刮。
24.(4)智能开启前后雾灯,域控制器主站判断车辆当前车速大于设定阈值且雨刮在高速挡持续b时间,自动打开前后雾灯,照明前方道路及警示后车保持车距,保障行车安全。
25.参照图2,上述(1)中智能雨刮减速的具体流程如下:s11、判断车辆是否为驱动模式停车且拉上手刹,若是进入步骤s12;s12、判断雨刮档位是否处在高速挡,若是进入步骤s13;s13、雨刮档位自动从高速挡变成低速挡;s14、判断车辆车速是否大于0,若是进入步骤s14;s14、雨刮档位自动从低速挡恢复成高速挡。
26.参照图3,上述(2)中智能雨刮关闭的具体流程如下:s21、在雨刮工作时,根据车上gps定位信号,域控制器主站判断车辆是否进入隧道且持续时间是否超过a,a优选为10s,若是进入步骤s22;s22、自动关闭雨刮电源,停止雨刮工作;s23、根据gps定位信号,判断车辆是否出隧道,若是进入步骤s24;s24、雨刮自动恢复工作。
27.参照图4,上述(3)中雨刮复位信号智能判断的具体流程如下:s31、判断雨刮复位信号是否失效,若是进入步骤s32;s32、判断雨刮是否正在运行,若是,进入步骤s33,若否进入步骤s34;s33、雨刮无复位信号无法停止;s34、开启雨刮时无复位信号,雨刮不工作;s35、将雨刮工作时电流驱动芯片的电流信号当成复位信号使用;s36、发出故障诊断信号通过域控制器从站发给仪表,声光提醒驾驶员及时检修雨刮。
28.参照图5,上述(4)中智能开启前后雾灯的具体流程如下:s41、域控制器主站判断车辆当前车速大于设定阈值且雨刮工作在高速档位持续b时间,若是进入步骤s42;s42、自动开启前后雾灯;s43、域控制器主站判断车辆当前车速小于设定阈值或雨刮工作在低速档位持续b时间,b优选为60s,若是进入步骤s44;s44、自动关闭前后雾灯。
29.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1