一种基于人工智能的自动泊车系统的制作方法
1.本发明涉及自动泊车系统技术领域,具体为一种基于人工智能的自动泊车系统。
背景技术:
2.自动泊车系统是利用安装在车辆上和停车位上的各种传感器,在汽车向预定停车位停车时,采集车辆附近环境信息,对周围的障碍物进行辨识,对如何把车停到指定停车位进行分析计算并控制,从而使车辆能够自主地、安全迅速地使车辆停靠在停车位上。
3.现有的自动泊车大致分为三种:辅助泊车、部分自动泊车和自动泊车,其中:辅助泊车使用传感器实现障碍物的探测和声光提醒;如泊车雷达、泊车摄像头、360全景可视系统等。
4.部分自动泊车(高级泊车辅助apa):使用多个传感器实现“搜索车位”、“规划泊车路径”、“操控转向系统”等功能,在驾驶员监控环境下实现泊车动作。有些apa系统还需要驾驶员换档和控制车速。
5.自动泊车:不需要驾驶员操作,即可独立完成泊车动作。前提是驾驶员要先把车开到停车位附近。
6.辅助泊车和部分自动泊车需要在驾驶员监控或操作下实现泊车。目前大多数自动泊车系统依靠摄像头确定停车位位置,在光线不良时很容易无法识别或无法正确识别停车位位置而导致泊车失败。为此需要设计一种基于人工智能的自动泊车系统。
技术实现要素:
7.(一)解决的技术问题
8.针对现有技术的不足,本发明提供了一种基于人工智能的自动泊车系统,解决了目前泊车系统使用不便,对外界因数要求较多的问题。
9.(二)技术方案
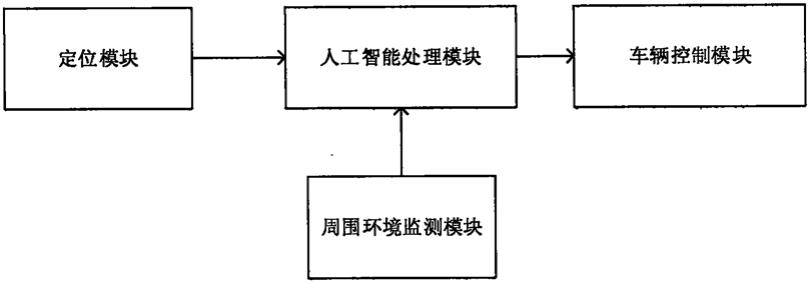
10.为实现以上目的,本发明通过以下技术方案予以实现:一种基于人工智能的自动泊车系统,包括定位模块、周围环境监测模块、人工智能处理模块、车辆控制模块,其中:
11.定位模块,用于对车辆与停车位之间的距离及方位信息进行测算;
12.周围环境监测模块,用于在自动泊车过程中对车辆周围环境进行监测;
13.人工智能处理模块,用于对定位模块和周围环境监测模块收到的信息进行处理;
14.车辆控制模块,用于在自动泊车过程中对车辆进行控制。
15.优选的,所述定位模块包括电子标签、阅读器和计算机终端,其中:
16.计算器终端,安装于车辆上,用于用户发送指令,同时用于接收阅读器发送的信号,并对信号进行计算处理;
17.电子标签,用于确定车位的坐标,并且发送信号给阅读器;
18.阅读器,用于测定车辆与电子标签之间的距离,然后测定车辆的实时位置。
19.优选的,所述电子标签设置在车位的四角,所述阅读器设置在车辆内端四角,通过
放置在车辆上的的四个阅读器分别对停车位的四个电子标签发送的信号送入计算机终端进行处理计算出距离信息,之后以车辆左下角的阅读器为原点建立坐标系,设四个阅读器的坐标分别为(0,0)、(0,l)、(w,0)、(w,l),对停车位某一电子标签测得的距离分别为d0、d1、d2、d3,该电子标签的坐标(x,y)的计算公式为:
[0020][0021][0022][0023][0024]
优选的,所述周围环境监测模块由热红外成像设备和雷达传感器组成,其中:
[0025]
雷达传感器,布置于车辆前部和后部,用于对车辆前部和后部的障碍物进行监测;
[0026]
热红外成像设备,用于对车辆四周环境进行监测。
[0027]
优选的,所述车辆控制模块包括路径追踪单元和电子控制单元,其中:
[0028]
路径追踪单元,用于接收人工智能模块输出的坐标轨迹信息,经过计算输出指令,输出包括转向角度、速度、行驶方向和驻车指令信号送入电子控制单元执行操作;
[0029]
电子控制单元,用于对输入的转向角度、速度、行驶方向和驻车指令进行处理。
[0030]
优选的,所述人工智能处理模块输入端接入三个信号,第一个为定位模块输出的定位信号,第二个是周围环境监测模块的热红外设备输出的图像信号,第三个是周围环境监测模块的雷达传感器输出的雷达信号,定位信号通过一个神经网络输出坐标轨迹,此即泊车路线;热红外设备输出的图像信号通过神经网络检测出行人或障碍物在图像上的位置,之后判断行人或障碍物是否在图像危险区域内出现,并将此结果与雷达传感器输出信号进行融合,输出速度和驻车指令信息。
[0031]
(三)有益效果
[0032]
本发明提供了一种基于人工智能的自动泊车系统。具备以下有益效果:
[0033]
1、该基于人工智能的自动泊车系统定位采用了电子标签和阅读器进行定位,与传统的基于摄像头图像定位的方法相比,此方案不受光照和遮挡的影响,即受外界因数影响较小。
[0034]
2、该基于人工智能的自动泊车系统设置的周围环境监测模块,采用雷达传感器与热红外成像设备共同监测周围环境,其中热红外设备监测雷达传感器监测不到的车辆两侧人或障碍物,并且热红外设备对光照不敏感,与传统的可见光摄像头相比在夜间监测的性能不受影响。
附图说明
[0035]
图1为本发明结构示意图;
[0036]
图2为本发明的定位模块工作流程示意图;
[0037]
图3为本发明的人工智能处理模块工作流程示意图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
实施例:
[0040]
如图1所示,本发明实施例提供包括定位模块、周围环境监测模块、人工智能处理模块、车辆控制模块。
[0041]
如图2所示,定位模块包括电子标签、阅读器和计算机终端,用于对车辆与停车位之间的距离及方位信息进行测算。其中:计算器终端安装于车辆上,用于用户发送指令,同时用于接收阅读器发送的信号,并对信号进行计算处理;电子标签用于确定车位的坐标,并且发送信号给阅读器;阅读器用于测定车辆与电子标签之间的距离,然后测定车辆的实时位置。
[0042]
该定位模块工作时,首先由驾驶员通过计算机发送指令给阅读器,阅读器根据计算机发出的指令进行读写操作,通过天线向周围发送特定频率的射频信号,当电子标签进入到阅读器的读写范围后,接收阅读器发送的信号并将标签信息通过内置天线发送出去,阅读器接收到标签信息后,将信息送至计算机终端进行处理。
[0043]
电子标签设置在车位的四角,阅读器设置在车辆内端四角,通过放置在车辆上的的四个阅读器分别对停车位的四个电子标签发送的信号送入计算机终端进行处理计算出距离信息,之后以车辆左下角的阅读器为原点建立坐标系。
[0044]
设四个阅读器的坐标分别为(0,0)、(0,l)、(w,0)、(w,l),对停车位某一电子标签测得的距离分别为d0、d1、d2、d3,则该电子标签的坐标(x,y)可通过如下公式计算:
[0045][0046][0047][0048][0049]
以此类推,可计算出停车位四个电子标签的坐标,然后将将定位的结果送入人工智能处理模块进行处理。
[0050]
周围环境监测模块,用于在自动泊车过程中对车辆周围环境进行监测,周围环境监测模块由热红外成像设备和雷达传感器组成,其中:雷达传感器布置于车辆前部和后部,用于对车辆前部和后部的障碍物进行监测;热红外成像设备用于对车辆四周环境进行监测。热红外成像设备对光照条件不敏感,可用于白天和夜间的监视,雷达传感器和热红外成像设备的监测信号送入人工智能处理模块进行处理。
[0051]
如图3所示,人工智能处理模块,用于对定位模块和周围环境监测模块收到的信息进行处理。
[0052]
人工智能处理模块输入端有三个信号,第一个是定位模块输出的定位信号,第二个是周围环境监测模块的热红外设备输出的图像信号,第三个是周围环境监测模块的雷达
传感器输出的雷达信号。定位信号通过一个神经网络输出坐标轨迹,此即泊车路线。热红外设备输出的图像信号通过神经网络检测出行人或障碍物在图像上的位置,之后判断行人或障碍物是否在图像危险区域内出现,并将此结果与雷达传感器输出信号进行融合,输出速度和驻车指令信息;
[0053]
车辆控制模块,用于在自动泊车过程中对车辆进行控制。
[0054]
人工智能模块输出的坐标轨迹信息输入到路径追踪单元,经过计算输出指令,输出包括转向角度、速度、行驶方向和驻车指令信号送入电子控制单元执行操作。
[0055]
周围环境监测模块经人工智能模块处理之后的速度指令信息送入电子控制单元执行操作。
[0056]
其中电子控制单元分别对输入的转向角度、速度、行驶方向和驻车指令进行处理。转向角度指令通过电机控制转向油泵来控制车辆转向,速度指令控制节气门上的电动机,进而驱动节气门开度来控制车速。行驶方向指令通过控制变速箱来控制挡位。
[0057]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1