一种煤矿井下用大容量电源装置自动充电平台的制作方法
1.本发明涉及煤矿井下用大容量电源装置自动充电平台,属于煤矿井下辅助运输的技术领域。
背景技术:
2.绿色矿山建设经过多年的发展,从20年代末小批量使用电源装置车辆,并随着政策支持和煤矿企业“以人为本”的理念持续深入,到目前使用新能源车辆逐渐成为趋势,且为实现到2025年我国煤矿企业基本实现智能化的总体目标,国内相关企业也加大了多新能源车辆智能化的研发,而要实现车辆智能化就要求基本可实现无人操作或远程操作,尤其是对于煤矿用重型新能源搬家车辆,对其快速换装电源装置提出了更高的要求。
3.在实现本发明过程中,发明人发现现有技术中至少存在如下问题:目前经过防爆的电源装置重量可达7
‑
20吨,但仅有30km的续航里程,为了保证车辆连续运行,每台车辆平均要配置三块电源装置,一块使用、一块充电、另一块静置冷却恢复,电源装置车辆使用过程中的主要问题就是如何合理配置三块电源装置的充放电。车辆在井下工作面使用时,更换电源装置和充电过程过于繁琐和费力,既需要拆卸大吨位电源装置还需要使用跨接电缆将充满电的电源装置与车辆连接,由于电源装置的跨接电缆插头及电缆长将近20m、重量接近70kg,且操作此过程需要两位工人协作配合,一位工人驾驶车辆,另一位工人还需拖拽电缆,以防电缆被挤坏,因此大多数煤矿工人在使用电源装置车辆时经常性地长时间使用一块电源装置,仅在车辆停用间隙将其开往充电硐室充电,短暂充电后再开往工作面使用,造成其中一块电源装置使用时间过长,性能严重下降;而另两块电源装置由于长时间不使用不维护,造成电源装置极板硫化,其性能难以恢复。因此存在改进空间。
技术实现要素:
4.本发明的目的就是针对背景技术的难点,针对煤矿井下电动车辆在使用过程中充电过程笨重繁琐、电源装置寿命过短的问题,提供一种煤矿用大容量电源装置自动充电平台。
5.为了解决上述技术问题,本发明采用的技术方案为:一种煤矿井下用大容量电源装置自动充电平台,包括:
6.智能充电机,智能充电机上安装有视频识别主机、充电插头伸缩机构和激光雷达;
7.一级转动平台,可转动地围绕智能充电机设置;
8.若干个二级平台,沿一级转动平台的周向设置,并与一级转动平台活动相连;
9.若干个电源装置,电源装置固定在二级平台上,电源装置的后端设有充电口、若干个特征点和激光雷达;
10.一级转动平台用于将待充电的电源装置的背部转动至正对智能充电机,视频识别主机上的摄像头用于对特征点进行匹配分析,确定电源装置的初始位置;激光雷达用于通过扫描使充电口和充电插头伸缩机构精确对准;充电插头伸缩机构用于将充电插头对充电
口进行插拔。
11.进一步地,所述充电插头伸缩机构的最前端安装有行程开关,行程开关用于检测所述充电插头与所述充电口是否电性相连。
12.进一步地,还包括plc控制器、第一电机控制器和第一转动电机,所述视频识别主机、激光雷达、所述智能充电机、所述行程开关都与plc控制器相连,所述plc控制器与第一电机控制器相连,第一电机控制器与第一转动电机相连,第一转动电机用于带动所述一级转动平台旋转。
13.进一步地,还包括第二电机控制器、第三电机控制器、第四电机控制器、第二转动电机、第一直动电机和第二直动电机,第二电机控制器、第三电机控制器和第四电机控制器都与所述plc控制器相连,第二转动电机与第二电机控制器相连,第一直动电机与第三电机控制器相连,第二直动电机与第四电机控制器相连,第二转动电机用于带动所述二级平台旋转,第一直动电机和第二直动电机用于带动所述二级平台在所述一级转动平台上进行平面移动。
14.进一步地,还包括第五电机控制器、第六电机控制器、第七电机控制器、第三直动电机、第四直动电机和第五直动电机,第五电机控制器、第六电机控制器和第七电机控制器都与所述plc控制器相连,第三直动电机与第五电机控制器相连,第四直动电机与第六电机控制器,第五直动电机与第七电机控制器相连,第三直动电机和第四直动电机用于使所述充电插头伸缩机构在竖直平面上移动,第五直动电机用于使充电插头伸缩机构进行伸缩运动。
15.进一步地,所述特征点的数量为7个。
16.进一步地,所述充电插头伸缩机构为两级推移机构,总行程为200mm。
17.进一步地,所述视频识别主机上的摄像头对特征点进行匹配分析采用harris角点检测方法。
18.进一步地,所述电源装置和所述二级平台的数量都为3个。
19.本发明与现有技术相比具有以下有益效果。
20.本发明主要为解决煤矿井下新能源车辆大容量电源装置更换问题,与传统的通过跨接电缆来实现电源装置的更换有着很大的优势,简化了更换电源装置的步骤,并减轻了工人的劳动强度,避免工人在操作过程中被挤压的风险;同时很好地对电源装置进行交替更换,延长了电源装置的使用寿命;长远来看对于推动煤矿井下新能源车辆的无人化、智能化发展起到积极推动作用。
附图说明
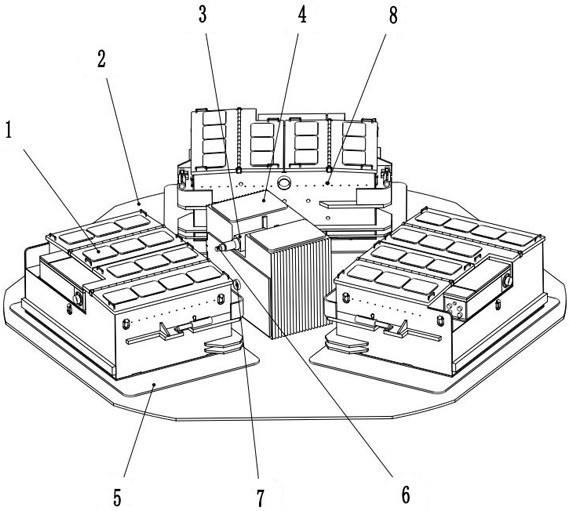
21.图1为本发明一实施例提供的煤矿井下用大容量电源装置自动充电平台的结构示意图。
22.图2为本发明一实施例提供的煤矿井下用大容量电源装置自动充电平台的电气原理图。
23.图中,1
‑
电源装置,2
‑
一级转动平台,3
‑
充电插头伸缩机构,4
‑
智能充电机,5
‑
二级平台,6
‑
行程开关,7
‑
视频识别主机,8
‑
激光雷达,11
‑
第一电机控制器,21
‑
第二电机控制器,22
‑
第三电机控制器,23
‑
第四电机控制器,31
‑
第五电机控制器,32
‑
第六电机控制器,
33
‑
第七电机控制器,101
‑
第一转动电机,201
‑
第二转动电机,202
‑
第一直动电机,203
‑
第二直动电机,301
‑
第三直动电机,302
‑
第四直动电机,303
‑
第五直动电机。
具体实施方式
24.下面结合附图对本发明做进一步的说明。
25.如图1、图2所示,本发明实施例一种煤矿井下用大容量电源装置自动充电平台,包括:智能充电机4,智能充电机4上安装有视频识别主机7、充电插头伸缩机构3和激光雷达8;一级转动平台2,可转动地围绕智能充电机4设置;若干个二级平台5,沿一级转动平台2的周向设置,并与一级转动平台2活动相连;若干个电源装置1,电源装置1固定在二级平台5上,电源装置1的后端设有充电口、若干个特征点和激光雷达8。本实施例中,电源装置1和二级平台5的数量都为3个。智能充电机4的输入电压为660/1140v,输出电压为0
‑
400vdc,输出电流为0
‑
300a。一级转动平台2上具有三个位置,可放置三块电源装置1,当车辆从运输大巷进入充电硐室时直接将电源装置1放置在需充电位置,一级转动平台2经过转动将电源装置转到智能充电机4的位置,此时充满电的电源装置也转动到待装位置,操作人员仅需安装连接电源装置将车辆启动驶出即可。
26.一级转动平台2用于将待充电的电源装置1的背部转动至正对智能充电机4,视频识别主机7上的摄像头用于对特征点进行匹配分析,确定电源装置1的初始位置;激光雷达8用于通过扫描使充电口和充电插头伸缩机构3精确对准;充电插头伸缩机构3用于将充电插头对充电口进行插拔。充电插头伸缩机构3的最前端安装有行程开关6,行程开关6用于检测充电插头与充电口是否电性相连,即通过行程开关6识别充电插头是否到位并接触良好。
27.本发明自动充电平台还包括plc控制器、第一电机控制器11和第一转动电机101,视频识别主机7、激光雷达8、智能充电机4、行程开关6都与plc控制器相连,plc控制器与第一电机控制器11相连,第一电机控制器11与第一转动电机101相连,第一转动电机101用于带动一级转动平台2旋转。当电源装置充满电后,信号再次发送给充电插头伸缩机构3,控制充电插头拔出,一级转动平台2旋转120
°
,将充满电的电源装置转向待装工位,对亏电电源装置开始充电。
28.本发明自动充电平台还包括第二电机控制器21、第三电机控制器22、第四电机控制器23、第二转动电机201、第一直动电机202和第二直动电机203,第二电机控制器21、第三电机控制器22和第四电机控制器23都与plc控制器相连,第二转动电机201与第二电机控制器21相连,第一直动电机202与第三电机控制器22相连,第二直动电机203与第四电机控制器23相连,第二转动电机201用于带动二级平台5旋转,第一直动电机202和第二直动电机203用于带动二级平台5在一级转动平台2上进行平面移动。二级平台5具有三个自由度,沿x、y轴的平动和绕z轴的转动,实现平台的对准动作。二级平台5配合视频识别主机和雷达系统的信息通过转动副和移动副调整电源装置在二级平台自身的位置。
29.本发明自动充电平台还包括第五电机控制器31、第六电机控制器32、第七电机控制器33、第三直动电机301、第四直动电机304和第五直动电机303,第五电机控制器31、第六电机控制器32和第七电机控制器33都与plc控制器相连,第三直动电机301与第五电机控制器31相连,第四直动电机304与第六电机控制器32,第五直动电机303与第七电机控制器33相连,第三直动电机301和第四直动电机304用于使充电插头伸缩机构3在竖直平面上移动,
第五直动电机303用于使充电插头伸缩机构3进行伸缩运动。换言之,充电插头伸缩机构3具有三个自由度,具有沿x轴、y轴和z轴的的移动,当利用视频识别主机和激光雷达系统将充电口对准后,充电插头插入充电口对电源装置进行充电。
30.充电插头伸缩机构3为两级推移机构,总行程为200mm。
31.视频识别主机7上的摄像头对特征点进行匹配分析采用harris角点检测方法。特征点的数量为7个。具体地,对电源装置图像特征点识别、匹配和校正的过程,检测图像的特征点时,采用harris角点检测算法:
32.e(u,v)=∑
x,y
w(x,y)[i(x+u,y+v)
‑
i(x,y)]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0033]
其中,w(x,y)为窗函数,可为矩形窗或者高斯窗,[i(x+u,y+v)
‑
i(x,y)]2为图像灰度的梯度值。对于每个小的位移量(u,v),上式可双线性近似表示为
[0034][0035]
m是2
×
2的矩阵,e可近似表示局部互相关函数。
[0036][0037]
i
x
、i
y
分别为图像x,y方向的梯度值,m描述了在这点上的形状。设矩阵m的两个特征值为λ1、λ2,则可用λ1,λ2表示局部自相关函数的曲率。在实际运用中用来计算角点的相应函数可以写成:
[0038]
r=det(m)
‑
ktrace2(m)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0039]
det(m)=λ1λ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0040]
trace(m)=λ1+λ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0041]
判断标准为:如果矩阵m的行列式很大时,说明这是一条边或一个角点。k的值取0.05之间,然后设定一个合理的阈值t,当实际计算出来的r大于该阈值时,则表明找到了一个角点,否则就不是。
[0042]
对视觉系统上识别的点p
i
和待匹配图像上的点q
j
,d
ij
=d(p
i
,q
j
)可表示两个点的相似性,采用式(7)的欧式距离:
[0043][0044]
式(7)中l
i
(k)和l
j
(k)分别代表参考图像上的点p
i
和待匹配图像上的点q
j
的灰度差分不变量。由欧氏距离知道,当d
ij
越小时,表明这两个点越匹配。设定一个合理的阈值t,当d
ij
小于这个阈值t时,就认为这两个点是匹配的特征点对,根据电源装置上的7个匹配点对对图像扭曲角度进行分析计算,通过plc控制器对平台动作进行控制,通过移动和转动达到一级对准。
[0045]
本实施例中,本发明自动充电平台主要由plc控制器作为总控中心,各个机构动作通过电机转动实现,在电源装置1落于一级转动平台2上时,人为触发总控开关,自动充电平台开始工作,首先电机控制器11控制第一转动电机101带动一级转动平台2转动,将待充电源装置转至充电位置;视频识别主机7上的摄像头通过对电源装置1的特征点的匹配分析,确定电源装置在平台的初始位置,通过视频识别主机分析并将信号传输至plc控制器,通过第二、第三、第四电机控制器21、22、23分别控制第二转动201、第一直动电机202和第二直动
电机203,经过调整后电源装置1的后端充电口基本和智能充电机4对正;安装于电源装置和智能充电机上的激光雷达8通过扫描精确对准,通过第五、第六电机控制器31、32分别控制第三直动电机301、302,在确定坐标后,第五直动电机303推动充电插头伸缩机构3动作,充电插头插入电源装置后端充电口,在插头接触良好后,触动行程开关6,行程开关6发送信号至plc控制器,延时30s后,plc控制器发送信号至智能充电机4,电源装置开始充电。待电源装置充满电后,智能充电机4停止充电,并将信号发送至plc控制器,plc控制器发送信号至电机控制器33,控制第五直动电机303将充电插头从电源装置拔出,30s后一级转动平台4转动,将另一块待充电源装置转到充电位进行充电,充电过程依次进行,直至三块电源装置均充满电。
[0046]
尽管已经参照其示例性实施例具体显示和描述了本发明,但是本领域的技术人员应该理解,在不脱离权利要求所限定的本发明的精神和范围的情况下,可以对其进行形式和细节上的各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1