一种分布式四驱扭矩控制方法与流程
1.本发明涉及电动汽车驱动控制技术领域,尤其涉及一种分布式四驱扭矩控制方法。
背景技术:
2.目前,电动汽车的四驱控制,主要依赖于车辆状态(如轮速、方向盘转角、横摆加速度等)进行前后轴扭矩分配,实现经济性控制和牵引性控制等功能,多数控制没有充分考虑驾驶意图的识别,且车辆状态获取依赖于传感器,受传感器信号的精度和传输速度的影响,存在响应滞后问题;同时转向工况的控制方法主要通过制动进行横摆反馈控制为主的闭环控制,也存在延时滞后的问题,而且控制方法单一,产品化实现困难。
技术实现要素:
3.本发明的目的在于提供一种分布式四驱扭矩控制方法,以解决分布式四驱扭矩控制存在的延时滞后和未考虑驾驶意图的问题。
4.为达此目的,本发明采用以下技术方案:
5.本发明提供一种分布式四驱扭矩控制方法,包括:
6.s1,获取车辆当前参数;
7.所述车辆当前参数包括车辆纵向加速度、车辆侧向加速度、加速踏板开度、制动踏板开度、方向盘转角、横摆角速度、轮速和当前驾驶员选择的车辆操作模式;
8.s2,根据所述车辆纵向加速度、所述车辆侧向加速度、所述方向盘转角、所述横摆角速度和所述轮速,计算参考车速、车辆加速度、路面附着系数和道路坡度;
9.s3,根据所述路面附着系数、所述车辆加速度、所述参考车速和所述方向盘转角,计算行驶稳定因子;
10.s4,根据所述加速踏板开度、所述制动踏板开度、所述参考车速、所述方向盘转角和当前的所述车辆操作模式选择车辆工作模式;
11.所述车辆工作模式分为三种,分别为运动工作模式、经济工作模式、制动工作模式;
12.s5,当车辆处于所述运动工作模式、所述经济工作模式和所述制动工作模式的任一所述车辆工作模式时,计算四个电机扭矩,实现分布式四驱扭矩控制,具体计算过程为:
13.(s51)当电动汽车的当前所述车辆工作模式为所述运动工作模式时,对车辆前后轴荷进行动力学分析,考虑车辆加速阻力和坡度阻力,忽略掉空气阻力、轮胎滚动阻力偶矩、旋转惯量,前后轴的轴荷计算简化为:
[0014][0015]
[0016]
式中,f
zf
,f
zr
‑
前轴和后轴的垂向力,m
‑
整车质量,g
‑
重力加速度,h
g
‑
车辆质心高度,a
x
‑
车辆纵向加速度,θ
‑
坡度角,a
‑
前轴到车辆质心距离,b
‑
后轴到车辆质心距离,l=a+b表示车辆的轴距;
[0017]
前轴和后轴的路面利用附着系数分别为:
[0018][0019][0020]
式中,μ
f
和μ
r
分别为前轴和后轴的路面利用附着系数,f
xf
为前轴的纵向轮胎力,f
xr
为后轴的纵向轮胎力;
[0021]
设前轴和后轴的路面利用附着系数相等,有:
[0022][0023]
假设所述运动工作模式下的轴间扭矩分配系数λ1为:
[0024][0025]
忽略车轮滚动阻力偶矩,前后和后轴的电机驱动扭矩t
f
、t
r
,与前轴和后轴的纵向载荷f
xf
、f
xr
的关系为:
[0026][0027][0028]
式中,r
f
‑
前轴的轮胎半径,r
r
‑
后轴的轮胎半径,j
f
‑
前轴的转动惯量,j
r
‑
后轴的转动惯量,
‑
前轴的加速度,
‑
后轴的加速度;
[0029]
假设车辆处于匀速或加速稳定状态,忽略前后轴转动惯量所产生的惯性力,则有:
[0030]
t
r
=r
r
f
xr
[0031]
t
f
=r
f
f
xf
[0032]
由此,轴间扭矩分配系数λ1表示为:
[0033][0034]
令tanθ=i,cosθ=1,则有,
[0035][0036]
根据上述公式,通过道路坡度i和车辆加速度a
x
,获取轴间扭矩分配系数λ1,之后对同轴的左右电机进行平均分配;
[0037]
(s52)当电动汽车的当前所述车辆工作模式为所述经济工作模式时,驱动系统实时功率计算如下式所示:
[0038]
t
r
=λ2·
t
a
[0039]
t
f
=(1
‑
λ2)
·
t
a
[0040][0041][0042]
p
all
=p
f
+p
r
[0043]
式中,t
a
表示驾驶员需求扭矩,t
f
表示前轴电机驱动扭矩,t
r
表示后轴电机驱动扭矩,λ2表示经济工作模式下的轴间扭矩分配系数,n表示电机转速,η
f
、η
r
分别表示前后轴电机的工作效率,p
f
,p
r
分别表示前后轴电机的输出功率,p
all
表示前后轴电机总的输出功率,根据上式得到驱动系统实时功率的最优控制方程如下:
[0044][0045]
同时前后轴的分配扭矩需要受到总成可用能力的限制:
[0046]
λ2·
t
a
≤t
maxr
[0047]
(1
‑
λ2)
·
t
a
≤t
maxf
[0048]
式中,t
maxr
表示后轴电机总可用扭矩,t
maxf
表示前轴电机总可用扭矩;
[0049]
根据车辆当前的驾驶员需求扭矩和参考车速,结合前后轴电机的工作效率,离线计算驱动系统实时功率最优的扭矩分配表,使整车当前驱动系统的功率损失最小,进而计算得到不同参考车速和前后轴电机驱动扭矩状态下的最优轴间扭矩分配系数;
[0050]
(s53)当电动汽车的当前所述车辆工作模式为所述制动工作模式时,所述制动工作模式下的轴间扭矩分配系数λ
rear
受下式限制,实现制动力分配在前轴:
[0051]
λ
rear
=min(0.5,λ2)。
[0052]
可选地,所述车辆操作模式包括舒适操作模式、经济操作模式和运动操作模式。
[0053]
可选地,所述参考车速通过如下方式得到:
[0054]
将各个车轮的轮速在后轴中心进行归一化处理;
[0055][0056][0057][0058][0059]
式中,
[0060]
v
fl
为左前轮纵向车速,v
fr
为右前轮纵向车速,v
rl
为左后轮纵向车速,v
rr
为右后轮纵向车速,v
fl_x
为左前轮在后轴中心的纵向车速,v
fr_x
为右前轮在后轴中心的纵向车速,v
rl_x
为左后轮在后轴中心的纵向车速,v
rr_x
为右后轮在后轴中心的纵向车速,l为车辆轴距,b为轮矩,δ为前轮转角,为横摆角速度;
[0061]
选择最小的归一化轮速作为参考车速,即:
[0062]
v
ref_veh
=min(v
fl_x
,v
fr_x
,v
rl_x
,v
rr_x
)。
[0063]
可选地,所述车辆加速度a
act
:
[0064][0065]
其中,为参考车速v
ref_veh
的导数。
[0066]
可选地,所述路面附着系数考虑如下两种情况:
[0067]
如果驱动防滑触发,则用当前车辆加速度更新路面附着系数:
[0068]
μ=a
act
[0069]
如果驱动防滑功能未被触发,则更新路面附着系数为当前车辆加速度与上一时刻路面附着系数的最大值:
[0070]
μ=max(a
act
,μ)
[0071]
式中,v
ref_veh
为参考车速,μ为路面附着系数,a
act
为车辆加速度。
[0072]
可选地,所述道路坡度i为:
[0073][0074]
其中,i表示道路坡度;a
x
表示传感器测量的纵向加速度,g表示重力加速度,v
x
表示车辆的纵向车速。
[0075]
可选地,所述行驶稳定因子γ如下:
[0076][0077]
式中,γ为行驶稳定因子,fac1和fac2分别为与参考车速和方向盘转角有关的因子,取值在0
‑
1之间。
[0078]
可选地,所述车辆工作模式通过如下方式进行划分:
[0079]
(1)在如下的任意一种情况下,车辆进入所述运动工作模式:
[0080]
(1.1)所述加速踏板开度大于第一预设开度;
[0081]
(1.2)所述加速踏板开度大于第二预设开度且小于第一预设开度、且所述加速踏板开度变化率大于第一预设值、且接收到的模式指令为舒适操作模式指令;
[0082]
(1.3)所述行驶稳定因子大于设定值、且接收到的所述模式指令为所述舒适操作模式指令;
[0083]
(1.4)所述路面附着系数小于设定值、且接收到的所述模式指令为所述舒适操作模式指令;
[0084]
(1.5)所述道路坡度大于设定值、且接收到的所述模式指令为所述舒适操作模式指令;
[0085]
(1.6)接收到的所述模式指令为所述运动操作模式指令;
[0086]
(2)在如下任意一种情况下进入所述经济工作模式:
[0087]
(2.1)所述加速踏板开度大于0且小于等于第二预设开度、且接收到的所述模式指令为所述舒适操作模式指令;
[0088]
(2.2)接收到的所述模式指令为所述经济操作模式指令;
[0089]
(3)在以下任意一种情况下进入所述制动工作模式:
[0090]
(3.1)所述加速踏板开度为0、且接收到的所述模式指令为所述舒适操作模式指令;
[0091]
(3.2)所述制动踏板开度信号大于0。
[0092]
可选地,步骤s52还包括对所述最优轴间扭矩分配系数进行二次寻优的步骤,具体为:
[0093]
容忍度tolerance的定义如下所示:
[0094][0095]
式中,p
all_best
表示在某一工作点下最优轴间扭矩分配系数所对应的总的输出功率,p
all_t
表示在满足容忍度约束条件下的总的输出功率。
[0096]
可选地,还包括转向工况的扭矩分配控制,所述转向工况的判别条件为:
[0097]
(1)所述加速踏板开度大于设定值a;
[0098]
(2)所述参考车速大于设定值b;
[0099]
(3)所述方向盘转角大于设定值c;或所述方向盘转角大于设定值d,且方向盘转向角速度大于设定值e,其中,设定值d小于设定值c;
[0100]
在以上三个条件同时满足时进入转向工况,车辆采用轴荷前移的控制方法,具体为:
[0101]
当转向工况条件满足时,所述前轴进行降扭且持续时间为t1,然后降扭恢复且持续时间为t1
‑
t2;所述前轴扭矩再次降扭且持续时间为t2
‑
t3,然后降扭恢复且持续时间为t3
‑
t4,
……
,如此重复,通过多个间隔性的前轴降扭,使车辆轴荷前移。
[0102]
本发明的有益效果:
[0103]
本发明的一种分布式四驱扭矩控制方法,在考虑驾驶意图的条件下,结合车辆当前参数,驾驶员需求扭矩和当前车辆操作模式,对车辆当前工作状态进行再判断,得到三种车辆工作模式,分别计算四个电机扭矩,计算结果更加准确,解决了分布式四驱基于车辆操稳状态进行扭矩闭环控制的延时滞后问题。
附图说明
[0104]
图1是一种分布式四驱电动汽车的四个电机分布示意图;
[0105]
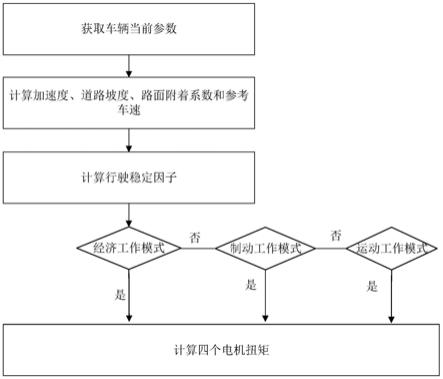
图2是本发明提供的一种分布式四驱扭矩控制方法流程图;
[0106]
图3是本发明提供的一种分布式四驱扭矩控制方法中三种车辆工作模式的划分示意图;
[0107]
图4是本发明提供的一种分布式四驱扭矩控制方法中转向工况下的扭矩控制示意图。
具体实施方式
[0108]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0109]
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0110]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0111]
在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0112]
本发明提供一种分布式四驱扭矩控制方法,分布式四驱电动汽车包括四个电机,如图1所示,分别为左前电机、左后电机、右前电机和右后电机,分别用于驱动左前轮、左后轮、右前轮和右后轮,四个电机统一由整车控制器vcu控制,执行包括转向和扭矩分配等,解决了现有控制方法存在的延时滞后以及未考虑驾驶员意图的问题。
[0113]
首先需要说明的是,本发明中涉及到的字母参数中,下脚标x表示车辆纵向方向,y表示侧向方向,z表示竖向或垂向方向,f表示前方,如前轮或前轴,r表示后方,如后轮或后轴。
[0114]
如图2所示流程,本发明提供的一种分布式四驱扭矩控制方法包括如下步骤:
[0115]
s1,获取车辆当前参数。
[0116]
车辆当前参数包括车辆纵向加速度、车辆侧向加速度、加速踏板开度、制动踏板开度、方向盘转角、横摆角速度、轮速和当前驾驶员选择的车辆操作模式,车辆操作模式包括舒适操作模式(也称auto模式)、经济操作模式(也称eco模式)和运动操作模式(也称sport模式)。
[0117]
s2,根据车辆纵向加速度、车辆侧向加速度、方向盘转角、横摆角速度和轮速,计算参考车速、车辆加速度、路面附着系数和道路坡度。
[0118]
s3,根据路面附着系数、车辆加速度、参考车速和方向盘转角,计算行驶稳定因子。
[0119]
s4,根据加速踏板开度、制动踏板开度、参考车速、方向盘转角和当前的车辆操作模式选择车辆工作模式。
[0120]
其中,车辆操作模式由驾驶员选择,车辆工作模式分为三种,分别为运动工作模式、经济工作模式、制动工作模式,是整车控制器对车辆当前工作状态的再判断,便于得到更加准确的电机扭矩。
[0121]
s5,当电动汽车处于运动工作模式、经济工作模式、制动工作模式的任一工作模式时,计算四个电机扭矩。
[0122]
上述分布式四驱扭矩控制方法中,车辆当前参数中考虑了驾驶员意图识别,对车
辆操作模式下的车辆当前运行状态进行再判断,新的判别机制包括三种车辆工作模式,在三种车辆工作模式下分别计算四个电机扭矩,实现了分布式四驱扭矩控制,四个电机的输出扭矩同时兼顾车辆的安全性、动力性和经济性,利于提高车辆转向性能,从而实现分布式四驱控制的驾驶辅助。
[0123]
可选地,步骤s2中参考车速v
ref_veh
,根据轮速、横摆角速度和方向盘转角计算得到,具体为:
[0124]
将各个车轮的轮速在后轴中心进行归一化处理;
[0125][0126][0127][0128][0129]
式中,
[0130]
v
fl
为左前轮纵向车速(m/s),v
fr
为右前轮纵向车速(m/s);
[0131]
v
rl
为左后轮纵向车速(m/s),v
rr
为右后轮纵向车速(m/s);
[0132]
v
fl_x
为左前轮在后轴中心的纵向车速(m/s),v
fr_x
为右前轮在后轴中心的纵向车速(m/s);
[0133]
v
rl_x
为左后轮在后轴中心的纵向车速(m/s),v
rr_x
为右后轮在后轴中心的纵向车速(m/s);
[0134]
l为车辆轴距(m),b为轮矩(m),δ为前轮转角(rad),为横摆角速度(rad/s)。
[0135]
选择最小的归一化轮速作为参考车速,即:
[0136]
v
ref_veh
=min(v
fl_x
,v
fr_x
,v
rl_x
,v
rr_x
)
[0137]
根据参考车速可以计算车辆加速度a
act
:
[0138][0139]
为参考车速v
ref_veh
的微分。
[0140]
如果驱动防滑触发,则用当前车辆加速度更新路面附着系数:
[0141]
μ=a
act
[0142]
如果驱动防滑功能未被触发,则更新路面附着系数为当前车辆加速度与上一时刻路面附着系数的最大值:
[0143]
μ=max(a
act
,μ)
[0144]
式中,v
ref_veh
为参考车速,μ为路面附着系数,a
act
为车辆加速度。
[0145]
当车辆在坡路上行驶时,道路坡度i的正弦值即为纵向加速度传感器测量值与纵向车速微分值的差值与重力加速度的比:
[0146]
[0147]
其中,i表示道路坡度;a
x
表示传感器测量的纵向加速度,g表示重力加速度,单位为m/s2,v
x
表示车辆的纵向车速。
[0148]
可选地,步骤s3中,行驶稳定因子γ主要由当前车辆加速度a
act
和路面附着系数μ确定,由参考车速v
ref_veh
和方向盘转角steerangle进行修正。
[0149][0150]
式中,γ为行驶稳定因子,该值在0与1之间,该值越大,表征路面利用越充分,越接近路面附着极限;fac1和fac2分别为与参考车速和方向盘转角有关的因子,取值在0
‑
1之间。
[0151]
需要说明的是,驾驶员需求扭矩是与加速踏板开度和参考车速有关的物理量,本发明的实施例中采用现有技术中的计算方法来得到驾驶员需求扭矩,因此不再展开具体计算过程。考虑驾驶员需求扭矩(包括驱动需求扭矩和制动需求扭矩),便于在现有车辆操作模式下划分车辆工作模式,以提供更好的扭矩分配方法。
[0152]
步骤s4中,根据步骤s1
‑
s3中的当前车辆参数,结合图3,三种车辆工作模式通过如下方式进行划分:
[0153]
(1)运动工作模式,在如下几种情况下,车辆进入运动工作模式:
[0154]
(1.1)加速踏板开度大于第一预设开度;
[0155]
(1.2)加速踏板开度大于第二预设开度且小于第一预设开度、且加速踏板开度变化率大于第一预设值、且接收到的模式指令为舒适操作模式指令;
[0156]
(1.3)行驶稳定因子大于设定值、且接收到的模式指令为舒适操作模式指令;
[0157]
(1.4)路面附着系数小于设定值、且接收到的模式指令为舒适操作模式指令;
[0158]
(1.5)道路坡度大于设定值、且接收到的模式指令为舒适操作模式指令;
[0159]
(1.6)接收到的模式指令为运动操作模式指令。
[0160]
(2)经济工作模式,在如下两种情况下进入经济工作模式:
[0161]
(2.1)加速踏板的开度大于0且小于等于第二预设开度、且接收到的模式指令为舒适操作模式指令;
[0162]
(2.2)接收到的车辆操作模式指令为经济操作模式指令。
[0163]
(3)制动工作模式,以下两种情况下进入制动工作模式:
[0164]
(3.1)加速踏板的开度为0、且接收到的车辆操作模式指令为自动(或舒适)操作模式指令;
[0165]
(3.2)制动踏板的开度信号大于0。
[0166]
步骤s5中,三种车辆工作模式下计算四个电机扭矩,具体如下:
[0167]
(s51)本实施例中,当电动汽车的当前车辆工作模式为运动工作模式时,对各个电机的扭矩按整车动力输出最优方案进行扭矩分配,基于车辆轴荷分配实现路面附着系数的充分利用,提升动力性。
[0168]
对车辆前后轴荷进行动力学分析,考虑车辆加速阻力和坡度阻力,忽略掉空气阻力、轮胎滚动阻力偶矩、旋转惯量等因素,前后轴的轴荷计算可简化为:
[0169][0170][0171]
式中,f
zf
,f
zr
‑
前轴和后轴的垂向力,m
‑
整车质量,g
‑
重力加速度,h
g
‑
车辆质心高度,a
x
‑
车辆纵向加速度,θ
‑
坡度角,a
‑
前轴到车辆质心距离,b
‑
后轴到车辆质心距离,l=a+b表示车辆的轴距。
[0172]
前轴和后轴的路面利用附着系数分别为:
[0173][0174][0175]
式中,μ
f
和μ
r
分别为前轴和后轴的路面利用附着系数,f
xf
为前轴的纵向轮胎力,f
xr
为后轴的纵向轮胎力。
[0176]
需要补充说明的是,路面利用附着系数小于路面附着系数,是指路面附着系数的利用率。
[0177]
为提升车辆纵向驱动稳定性,前轴和后轴的路面利用附着系数应尽量相等,以降低驱动轮的总路面附着系数,防止驱动轮过早出现打滑现象,即:
[0178][0179]
假设运动工作模式下的轴间扭矩分配系数λ1为:
[0180][0181]
忽略车轮滚动阻力偶矩,前后和后轴的电机驱动扭矩t
f
、t
r
,与前轴和后轴的纵向载荷(纵向力)f
xf
、f
xr
的关系为:
[0182][0183][0184]
式中,r
f
‑
前轴的轮胎半径,r
r
‑
后轴的轮胎半径,j
f
‑
前轴的转动惯量,j
r
‑
后轴的转动惯量,
‑
前轴的加速度,
‑
后轴的加速度。
[0185]
假设车辆处于匀速或加速等稳定状态,前轴和后轴(也简称为前后轴)加速度较小,忽略前后轴转动惯量所产生的惯性力,则有:
[0186]
t
r
=r
r
f
xr
[0187]
t
f
=r
f
f
xf
[0188]
由此,轴间扭矩分配系数λ1可表示为:
[0189]
[0190]
令tanθ=i,cosθ=1,则有:
[0191][0192]
根据上述公式,通过道路坡度i和车辆加速度a
x
,可获取轴间扭矩分配系数λ1,之后对同轴的左右电机进行平均分配。
[0193]
(s52)当电动汽车的当前工作模式为经济工作模式时,对各个电机的扭矩按整车经济效率最优进行分配。在保证满足需求扭矩的情况下,调节前后轴上电机工作负荷,使得前后轴上电机工作点尽可能落在电机工作的高效区域,以提高电机的工作效率,保证车辆的经济性。
[0194]
驱动系统实时功率计算如下式所示:
[0195]
t
r
=λ2·
t
a
[0196]
t
f
=(1
‑
λ2)
·
t
a
[0197][0198][0199]
p
all
=p
f
+p
r
[0200]
式中,t
a
表示驾驶员需求扭矩,t
f
表示前轴电机驱动扭矩,t
r
表示后轴电机驱动扭矩,λ2表示经济工作模式下的轴间扭矩分配系数,n表示电机转速(本文中假设四个电机的转速相同),η
f
、η
r
分别表示前后轴电机的工作效率,p
f
,p
r
分别表示前后轴电机的输出功率,p
all
表示前后轴电机总的输出功率。根据上式得到驱动系统实时功率的最优控制方程如下:
[0201][0202]
同时前后轴的分配扭矩需要受到总成可用能力的限制:
[0203]
λ2·
t
a
≤t
maxr
[0204]
(1
‑
λ2)
·
t
a
≤t
maxf
[0205]
式中,t
maxr
表示后轴电机总可用扭矩,t
maxf
表示前轴电机总可用扭矩。
[0206]
根据车辆当前的驾驶员需求扭矩和参考车速,结合前后轴电机的工作效率,可离线计算驱动系统实时功率最优的扭矩分配表,使整车当前驱动系统的功率损失最小,进而计算得到不同参考车速和前后轴电机驱动扭矩状态下的最优轴间扭矩分配系数。
[0207]
需要说明的是,在一些参考车速和电机驱动扭矩状态,存在多种扭矩分配方案使当前驱动系统的功率损失最小的情况,且在低驱动扭矩工况下存在较大波动,不利于控制实现。因此,本发明在寻优过程中,引入了容忍度的约束条件,对所得到的最优轴间扭矩分配系数进行二次寻优。
[0208]
容忍度tolerance的定义如下所示:
[0209]
[0210]
式中,p
all_best
表示在某一工作点下最优轴间扭矩分配系数所对应的总的输出功率,p
all_t
表示在满足容忍度约束条件下的总的输出功率。即在前后轴上电机总的输出功率p
all_best
在满足一定容忍度tolerance的情况下的总的输出功率p
all_t
,即认为是该轴间扭矩分配系数为最优的总的输出功率p
all_t
。可以理解的是,容忍度tolerance为0表示总的输出功率的偏差为0,本实施中容忍度tolerance设置为0.5,以得到满足精度要求的轴间扭矩分配系数。
[0211]
(s53)当电动汽车的当前工作模式为制动工作模式时,对前轴上的电机和后轴上的电机的扭矩分配需要进行能量回收效率最优分配,方法同经济工作模式下的轴间扭矩分配系数λ2,同时为保证制动安全,制动工作模式下的轴间扭矩分配系数λ
rear
受下式限制,实现制动力主要分配在前轴:
[0212]
λ
rear
=min(0.5,λ2)。
[0213]
可选地,本发明提供的一种分布式四驱扭矩控制方法,还包括根据加速踏板开度、参考车速、方向盘转角和方向盘转向角速度,判断电动汽车即当前车辆是否处于转向工况,在转向工况下,通过动态轴荷转移改善车辆的转向稳定性。
[0214]
首先,转向工况的判别需要考虑如下参数:加速踏板开度、参考车速、方向盘转角、方向盘转向角速度,当转向判别条件均满足时,进入转向工况,使能转向公开控制逻辑。
[0215]
该转向判别条件为:
[0216]
(1)加速踏板开度大于设定值a;
[0217]
(2)参考车速大于设定值b;
[0218]
(3)方向盘转角大于设定值c,或方向盘转角大于设定值d(d小于c),且方向盘转向角速度大于设定值e。
[0219]
以上三个条件同时满足时判定进入转向工况,在转向工况下,车辆采用轴荷前移的控制方法,结合图4,具体为:
[0220]
当转向工况条件满足时,所述前轴进行降扭且持续时间为t1,然后降扭恢复且持续时间为t1
‑
t2;所述前轴扭矩再次降扭且持续时间为t2
‑
t3,然后降扭恢复且持续时间为t3
‑
t4,
……
,如此重复,通过多个间隔性的降扭恢复段(前轴扭矩为0的时间段)减少车辆前轴驱动扭矩,使车辆轴荷前移,从而达到提升车辆入弯性能的目的。优选地,前轴扭矩为1的持续时间段具有相等的持续时间t1,前轴扭矩为0的持续时间段具有相等的持续时间(t2
‑
t1)。当车辆处于转向状态时,通过主动轴荷转移可以提升车辆的转向性能。
[0221]
可选地,通过操稳控制策略和主动防滑控制策略对各个电机的需求扭矩进行约束以输出电机需求扭矩。
[0222]
1)当车辆发生侧滑甩尾时,根据横摆控制策略对各个电机的驱动扭矩进行修正,具体为:根据车辆的参考车速和方向盘转角获取目标横摆角速度,根据目标横摆角速度与获取的车辆当前的实际横摆角速度的偏差,对车辆的前后轴上四个电机驱动扭矩进行修正,车辆pid控制器根据横摆角速度偏差进行闭环控制,动态调整各个车轮的扭矩分配。
[0223]
2)当车辆发生滑转时,根据主动防滑策略对各个电机的驱动扭矩进行修正,具体为:根据车辆的轮速、方向盘转角和横摆角速度获取参考车速,进而计算车辆的滑移率;根据车辆加速度和滑移率对车辆上的电机驱动扭矩进行修正,当滑移率超过阈值时,通过车辆pid控制器进行轮速偏差的闭环控制,预防和限制车轮的打滑。
[0224]
显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1