一种增程式电动汽车的增程器起停控制系统及控制方法与流程
1.本发明属于电动汽车控制技术领域,具体涉及一种增程式电动汽车的增程器起停控制系统及控制方法。
背景技术:
2.随着汽车保有量逐年升高,汽车排放问题日益严重,同时石油资源日渐减少,节能环保的新能源汽车应运而生,而新能源车中的纯电动汽车,因续航低、售价贵、充电慢等问题一直为大众所诟病,因此兼顾二者优点的增程式电动汽车逐渐为大众所青睐。
3.目前一般增程式电动汽车的增程器起停维度较为单一,相关技术中的增程器起停控制策略存在如下问题:(1)仅考虑电池电量和/或车速维度,未充分考虑整车运行工况,在低车速段不能拥有较好的nvh体验,制动滑行回收工况可能会限制部分能量回收,造成整车能量浪费;(2)未考虑各维度控制增程器起停优先级及切换逻辑,易造成增程器反复起停;(3)电量维持点(即soc维持点)固定,未考虑环境温度,用户也不可设置,用户体验较差。
技术实现要素:
4.本发明的目的是提供一种增程式电动汽车的增程器起停控制系统及控制方法,以使增程器起停控制更合理,避免整车能量浪费,提升驾驶体验。
5.本发明所述的增程式电动汽车的增程器起停控制系统,包括控制模块、用于获取车速v的车速获取模块和用于获取电池soc及电池放电功率w
f
的电池状态获取模块,还包括用于解析输出踏板需求功率w的踏板需求功率确定模块、用于获取地图导航信息的地图导航获取模块和用于解析输出soc维持点soc0的电量维持点确定模块。控制模块与所述踏板需求功率确定模块、车速获取模块、地图导航获取模块、电池状态获取模块、电量维持点确定模块连接,控制模块根据获取的踏板需求功率w、车速v、地图导航信息、电池soc、电池放电功率w
f
和soc维持点soc0综合判断增程器起停需求,再根据增程器起停状态,控制增程器起动或停机。
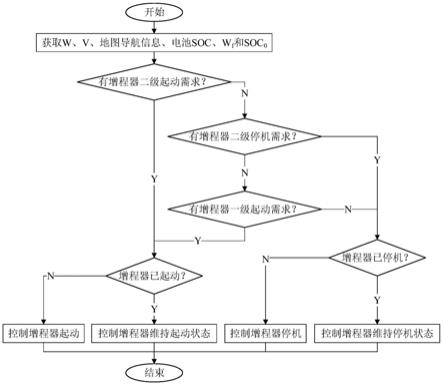
6.本发明所述的增程式电动汽车的增程器起停控制方法,采用上述增程器起停控制系统,其特征在于,该控制方法为:步骤一、控制模块获取踏板需求功率w、车速v、地图导航信息、电池soc、电池放电功率w
f
和soc维持点soc0,然后执行步骤二;步骤二、控制模块判断是否有增程器二级起动需求,如果是,则执行步骤五,否则执行步骤三;步骤三、控制模块判断是否有增程器二级停机需求,如果是,则执行步骤八,否则执行步骤四;步骤四、控制模块判断是否有增程器一级起动需求,如果是,则执行步骤五,否则执行步骤八;步骤五、控制模块判断增程器是否已起动,如果是,则执行步骤六,否则执行步骤
七;步骤六、控制模块控制增程器维持起动状态,然后结束;步骤七、控制模块控制增程器起动,然后结束;步骤八、控制模块判断增程器是否已停机,如果是,则执行步骤九,否则执行步骤十;步骤九、控制模块控制增程器维持停机状态,然后结束;步骤十、控制模块控制增程器停机,然后结束。
7.优选的,增程器二级起动需求标志位的初始值为0;当电池soc小于soc维持点soc0,或者踏板需求功率w大于电池放电功率w
f
与预设的第一功率偏移量w1之差时,控制模块使增程器二级起动需求标志位为1;当电池soc大于预设的第一soc阈值soc1,且踏板需求功率w小于电池放电功率w
f
与预设的第二功率偏移量w2之差时,控制模块使增程器二级起动需求标志位为0;其中,soc0< soc1,w1< w2。
8.如果增程器二级起动需求标志位为1,则控制模块判定有增程器二级起动需求;如果增程器二级起动需求标志位为0,则控制模块判定无增程器二级起动需求。
9.优选的,如果地图导航信息提示当前路况为长下坡,则控制模块判定有增程器二级停机需求;如果地图导航信息提示当前路况不为长下坡,则控制模块判定无增程器二级停机需求。
10.优选的,增程器一级起动需求标志位的初始值为0。
11.当满足条件1a和条件1b中的任意一个条件时,控制模块使增程器一级起动需求标志位为1;其中,条件1a为:在电池充电状态下,电池soc大于或等于预设的第一soc阈值soc1,且小于预设的第三soc阈值soc3,且车速v大于预设的第二车速阈值v2;条件1b为:在电池放电状态下,电池soc大于或等于soc维持点soc0,且小于预设的第二soc阈值soc2,且车速v大于预设的第二车速阈值v2。
12.当满足条件2a至条件2c中的任意一个条件时,控制模块使增程器一级起动需求标志位为0;其中,条件2a为:电池soc大于或等于预设的第三soc阈值soc3;条件2b为:在电池放电状态下,电池soc大于或等于预设的第二soc阈值soc2,且小于预设的第三soc阈值soc3;条件2c为:车速v小于预设的第一车速阈值v1。
13.其中,soc0< soc1< soc2< soc3,v1< v2。
14.如果增程器一级起动需求标志位为1,则控制模块判定有增程器一级起动需求;如果增程器一级起动需求标志位为0,则控制模块判定无增程器一级起动需求。
15.优选的,所述电量维持点确定模块解析输出soc维持点soc0的具体方式为:s1、判断是否收到用户设置的soc维持值,如果是,则执行s3,否则执行s2;s2、根据获取的环境温度,查询通过标定方式得到的环境温度与soc维持值的对应关系表,获得与环境温度对应的soc维持值,然后执行s4;s3、将用户设置的soc维持值作为所述soc维持点soc0,并输出,然后结束;s4、将与环境温度对应的soc维持值作为所述soc维持点soc0,并输出,然后结束。
16.soc维持点soc0综合考虑了环境温度及用户意图,能有效提升低温环境的整车表现,可按照用户意图修改soc维持点,提升了用户参与感;增程器的起停控制更加符合车辆使用场景及驾驶员需求,提升了驾驶体验。
17.本发明具有如下效果:(1)根据踏板需求功率w、车速v、地图导航信息、电池soc、电池放电功率w
f
和soc维持点soc0综合判断增程器起停需求,多元化增程器起停考虑维度,使增程器起停更贴近各种工况下的整车及驾驶员需求,优化了整车表现。
18.(2)根据整车动力性、nvh、排放、能耗、体验考虑,将踏板需求功率维度和soc维持点(即电量维持点)维度归为增程器二级起动需求,将地图导航信息维度归为增程器二级停机需求,将一定soc区间内车速维度归为增程器一级起动需求,默认需求为增程器一级停机需求。控制模块控制增压器起停的优先等级为:增程器二级起动需求>增程器二级停机需求>增程器一级起动需求>增程器一级停机需求,解决了整车各维度起停增程器需求相冲突的情况,解决了现有技术中车辆低速nvh体验较差、各维度起停需求导致增程器频繁起停、电量维持点固定以及整车能量回收工况能量容易造成浪费的问题。
附图说明
19.图1为本实施例中增程式电动汽车的增程器起停控制系统原理框图。
20.图2为本实施例中增程式电动汽车的增程器起停控制方法流程图。
21.图3为本实施例中解析输出soc维持点soc0的流程图。
22.图4为本实施例中增程器各起停维度所属的起动、停机需求等级表。
具体实施方式
23.如图1所示的增程式电动汽车的增程器起停控制系统,包括控制模块1、踏板需求功率确定模块2、车速获取模块3、地图导航获取模块4、电池状态获取模块5和电量维持点确定模块6。踏板需求功率确定模块2用于解析输出踏板需求功率w。车速获取模块3用于获取车速v。地图导航获取模块4用于获取地图导航信息,地图导航信息能提示当前路况(属于现有技术),比如长下坡、上坡、平路等。电池状态获取模块5用于获取电池soc及电池放电功率w
f
。电量维持点确定模块6用于解析输出soc维持点soc0。控制模块1与踏板需求功率确定模块2、车速获取模块3、地图导航获取模块4、电池状态获取模块5、电量维持点确定模块6连接,控制模块1根据获取的踏板需求功率w、车速v、地图导航信息、电池soc、电池放电功率w
f
和soc维持点soc0综合判断增程器起停需求,再根据增程器起停状态,控制增程器起动或停机。
24.踏板需求功率确定模块2解析输出踏板需求功率w的具体方式(属于现有技术)为:踏板需求功率确定模块2获取车速和油门踏板开度,并根据车速和油门踏板开度查询通过标定方式得到的车速
‑
油门踏板开度
‑
踏板需求功率表,获得对应的踏板需求功率,将该对应的踏板需求功率作为w输出。
25.如图3所示,电量维持点确定模块6解析输出soc维持点soc0的具体方式为:s1、判断是否收到用户设置的soc维持值,如果是,则执行s3,否则执行s2。
26.s2、获取环境温度,并根据环境温度,查询通过标定方式得到的环境温度与soc维
持值的对应关系表,获得与环境温度对应的soc维持值,然后执行s4。
27.s3、将用户设置的soc维持值作为soc维持点soc0,并输出,然后结束。
28.s4、将与环境温度对应的soc维持值作为soc维持点soc0,并输出,然后结束。
29.将与环境温度对应的soc维持值作为soc维持点soc0能保证低温环境下可通过增程器起停控制,将整车电量维持在相对较高soc点,使电池拥有较好的放电功率,整车拥有较好动力性。
30.如图2所示的增程式电动汽车的增程器起停控制方法,采用上述增程器起停控制系统,该增程器起停控制方法中由控制模块1执行的步骤具体为:步骤一、获取踏板需求功率w、车速v、地图导航信息、电池soc、电池放电功率w
f
和soc维持点soc0,然后执行步骤二。
31.步骤二、判断是否有增程器二级起动需求,如果是,则执行步骤五,否则执行步骤三。
32.增程器二级起动需求标志位的初始值为0。当控制模块1判断出电池soc小于soc维持点soc0(即soc<soc0),或者踏板需求功率w大于电池放电功率w
f
与预设的第一功率偏移量w1之差(即w> w
f ‑ꢀ
w1)时,控制模块1使增程器二级起动需求标志位为1。当控制模块1判断出电池soc大于预设的第一soc阈值soc1(即soc>soc1),且踏板需求功率w小于电池放电功率w
f
与预设的第二功率偏移量w2之差(即w< w
f ‑ꢀ
w2)时,控制模块1使增程器二级起动需求标志位为0;其中,soc0< soc1,w1< w2。
33.如果增程器二级起动需求标志位为1,则控制模块1判定有增程器二级起动需求;如果增程器二级起动需求标志位为0,则控制模块1判定无增程器二级起动需求。
34.步骤三、判断是否有增程器二级停机需求,如果是,则执行步骤八,否则执行步骤四。
35.如果地图导航信息提示当前路况为长下坡,则控制模块1判定有增程器二级停机需求;如果地图导航信息提示当前路况不为长下坡,则控制模块1判定无增程器二级停机需求。
36.步骤四、判断是否有增程器一级起动需求,如果是,则执行步骤五,否则(即为默认的增程器一级停机需求时)执行步骤八。
37.增程器一级起动需求标志位的初始值为0。
38.当控制模块1判断出满足条件1a和条件1b中的任意一个条件时,控制模块1使增程器一级起动需求标志位为1。其中,条件1a为:在电池充电状态下(根据电池soc判断,如果电池soc逐渐增加,则表示电池处于充电状态),电池soc大于或等于预设的第一soc阈值soc1,且小于预设的第三soc阈值soc3,且车速v大于预设的第二车速阈值v2(即soc1≤soc<soc3,且v>v2)。
39.条件1b为:在电池放电状态下(根据电池soc判断,如果电池soc逐渐减小,则表示电池处于放电状态),电池soc大于或等于soc维持点soc0,且小于预设的第二soc阈值soc2,且车速v大于预设的第二车速阈值v2(即soc0≤soc<soc2,且v>v2)。
40.当控制模块1判断出满足条件2a至条件2c中的任意一个条件时,控制模块1使增程器一级起动需求标志位为0。其中,条件2a为:电池soc大于或等于预设的第三soc阈值soc3(即soc≥soc3)。
41.条件2b为:在电池放电状态下,电池soc大于或等于预设的第二soc阈值soc2,且小于预设的第三soc阈值soc3(即soc2≤soc<soc3)。
42.条件2c为:车速v小于预设的第一车速阈值v1(即v<v1)。
43.其中,soc0< soc1< soc2< soc3,v1< v2。
44.如果增程器一级起动需求标志位为1,则控制模块1判定有增程器一级起动需求;如果增程器一级起动需求标志位为0,则控制模块1判定无增程器一级起动需求。
45.步骤五、判断增程器是否已起动,如果是,则执行步骤六,否则执行步骤七。
46.步骤六、控制增程器维持起动状态,然后结束。
47.步骤七、控制增程器起动,然后结束。
48.步骤八、判断增程器是否已停机,如果是,则执行步骤九,否则执行步骤十。
49.步骤九、控制增程器维持停机状态,然后结束。
50.步骤十、控制增程器停机,然后结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1