一种混合动力汽车纯电起步工况下电机转矩控制方法
1.本发明涉及混合动力汽车电机控制技术领域,尤其是涉及一种混合动力汽车纯电起步工况下电机转矩控制方法。
背景技术:
2.混合动力汽车相较于传统汽车,由于其动力系统集成了发动机、电机及传动系统,具有复杂的动力总成振动特性,也就面临着更复杂的nvh问题。
3.在纯电起步工况下,驾驶员很容易感受到车辆前后方向的低频振动,该振动频率范围一般为2~10hz。这是由于混合动力汽车在纯电起步时仅由电机提供一个快速响应,电机转矩的突变未经离合器及扭转减震器、就经过半轴传递到车轮,由此造成明显的扭转振动问题。
4.此外,传动间隙引起的冲击扭矩会使得扭转振动振幅进一步增加,这是因为由齿隙引起的死区效应产生的非线性特性,会使振动水平恶化,而且在闭环控制中,由于非线性间隙对系统带来了干扰,若不对其进行精确观测和补偿,必然会使得控制精度降低,大大影响驾驶的舒适性。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种混合动力汽车纯电起步工况下电机转矩控制方法,通过对纯电起步工况下间隙干扰进行准确观测,以提高电机转矩的控制精度、减少纯电起步抖动现象。
6.本发明的目的可以通过以下技术方案来实现:一种混合动力汽车纯电起步工况下电机转矩控制方法,包括以下步骤:
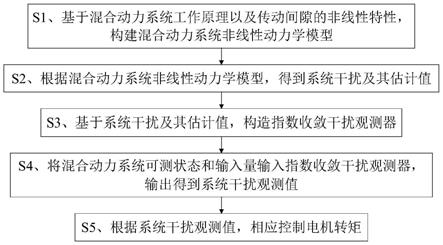
7.s1、基于混合动力系统工作原理以及传动间隙的非线性特性,构建混合动力系统非线性动力学模型;
8.s2、根据混合动力系统非线性动力学模型,得到系统干扰及其估计值;
9.s3、基于系统干扰及其估计值,构造指数收敛干扰观测器;
10.s4、将混合动力系统可测状态和输入量输入指数收敛干扰观测器,输出得到系统干扰观测值;
11.s5、根据系统干扰观测值,相应控制电机转矩。
12.进一步地,所述步骤s1中构建的混合系统非线性动力学模型具体为:
[0013][0014]
其中,j为系统惯量,θ,分别为系统的角度、角速度和角加速度,b为系统的输入矩阵,t为系统可测输入,d为系统干扰。
[0015]
进一步地,所述系统惯量包括电机端和车轮端的转动惯量。
[0016]
进一步地,所述系统惯量具体为:
[0017][0018]
其中,i为电机到车轮的传动比,j1、j2分别为电机端和车轮端的等效转动惯量。
[0019]
进一步地,所述系统可测输入包括电机转矩和车轮端负载转矩。
[0020]
进一步地,所述步骤s2具体是通过改写混合系统非线性动力学模型中的方程式,以得到系统干扰及其估计值的表达式。
[0021]
进一步地,所述步骤s2中系统干扰及其估计值具体为:
[0022][0023]
其中,分别为系统干扰及其微分的估计值,f为θ、的线性函数,k为观测器增益。
[0024]
进一步地,所述步骤s3具体是通过引入辅助向量给系统干扰及其估计值,以构造指数收敛干扰观测器。
[0025]
进一步地,所述辅助向量具体为:
[0026][0027]
其中,z为引入的辅助向量。
[0028]
进一步地,所述指数收敛干扰观测器具体为:
[0029][0030]
其中,为辅助向量的导数。
[0031]
进一步地,所述步骤s5具体包括以下步骤:
[0032]
s51、根据系统干扰观测值,得到电机补偿转矩;
[0033]
s52、基于电机补偿转矩值,对应控制电机转矩。
[0034]
与现有技术相比,本发明在构建混合系统非线性动力学模型时,充分考虑传动间隙对转矩传递的影响,使得构建的非线性动力学模型的输出更加贴合于实际传动系统的输出,并基于非线性动力学模型,以获得系统干扰及其估计值,从而构造指数收敛干扰观测器,相比于线性观测器,观测效果明显强于线性观测器,提高了观测的精度,且具有较强的鲁棒性,随着非线性间隙的增加,观测精度能够维持在良好的水平,由此保证了干扰观测的准确性,有利于提高后续对电机转矩控制的精准性、减少纯电起步抖动现象。
附图说明
[0035]
图1为本发明的方法流程示意图;
[0036]
图2为本发明间隙干扰观测的过程示意图;
[0037]
图3a为实施例中在π/36非线性间隙下半轴传递转矩的观测值和真实值对比示意图;
[0038]
图3b为实施例中在π/12非线性间隙下半轴传递转矩的观测值和真实值对比示意图;
[0039]
图3c为实施例中在π/6非线性间隙下半轴传递转矩的观测值和真实值对比示意图。
具体实施方式
[0040]
下面结合附图和具体实施例对本发明进行详细说明。
[0041]
实施例
[0042]
如图1所示,一种混合动力汽车纯电起步工况下电机转矩控制方法,包括以下步骤:
[0043]
s1、基于混合动力系统工作原理以及传动间隙的非线性特性,构建混合动力系统非线性动力学模型:
[0044][0045]
其中,j为系统惯量,θ,分别为系统的角度、角速度和角加速度,b为系统的输入矩阵,t为系统可测输入,d为系统干扰;
[0046]
本实施例中,系统惯量包括电机端和车轮端的转动惯量,系统惯量具体为:
[0047][0048]
其中,i为电机到车轮的传动比,j1、j2分别为电机端和车轮端的等效转动惯量;
[0049]
系统可测输入包括电机转矩和车轮端负载转矩;
[0050]
s2、根据混合动力系统非线性动力学模型,通过改写混合系统非线性动力学模型中的方程式,得到系统干扰及其估计值:
[0051][0052]
其中,分别为系统干扰及其微分的估计值,f为θ、的线性函数,k为观测器增益;
[0053]
s3、基于系统干扰及其估计值,构造指数收敛干扰观测器,具体是通过引入辅助向量给系统干扰及其估计值,以构造指数收敛干扰观测器,辅助向量为:
[0054][0055]
其中,z为引入的辅助向量;
[0056]
指数收敛干扰观测器为:
[0057][0058]
其中,为辅助向量的导数;
[0059]
s4、将混合动力系统可测状态和输入量输入指数收敛干扰观测器,输出得到系统干扰观测值;
[0060]
s5、根据系统干扰观测值,相应控制电机转矩,具体的:
[0061]
首先根据系统干扰观测值,得到电机补偿转矩;
[0062]
之后基于电机补偿转矩值,对应控制电机转矩。
[0063]
本实施例应用上述技术方案,其中间隙干扰观测的过程如图2所示:
[0064]
1)根据混合动力系统工作原理以及传动间隙的非线性特性,构建混合动力系统非线性动力学模型,本实施例构建的动力学模型如下:
[0065][0066]
其中,θ1、θ2分别为电机端和车轮端的转角,δθ和分别为电机端和车轮端的等效转角差,i为电机到车轮的传动比,j1、j2分别为电机端和车轮端的等效转动惯量,k、c分别为电机端和车轮端之间的等效扭转刚度和阻尼,t
tm
、t
l
分别为电机转矩和车轮端负载转矩。
[0067]
2)通过改写非线性动力学模型中的方程,获得干扰及其估计值的表达式:
[0068][0069]
3)基于系统干扰估计值的表达式,通过引入辅助向量:
[0070][0071]
以构造指数收敛干扰观测器:
[0072][0073]
4)最后将系统可测状态和输入量作为观测器输入,以观测估计得到系统干扰。
[0074]
根据上述方法进行试验得到半轴传递转矩的观测值和真实值曲线对比如图3a~图3b所示,图中横坐标为时间,单位为s,由对比图可以看出,采用本发明方法可在不同的非线性间隙下精确观测系统的干扰量,由此便可保证后续电机转矩补偿值的准确以及电机转矩控制的精准性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1