一种新能源车辆及其车辆输出扭矩控制方法及装置与流程
1.本发明属于新能源车辆安全控制技术领域,具体涉及一种新能源车辆及其车辆输出扭矩控制方法及装置。
背景技术:
2.目前的新能源车辆对动力系统多为开环控制,是根据油门、刹车的踏板开度信号、电机转速、bms当前放电能力等信息计算出整车需求扭矩。开环的动力系统控制策略在电机零部件无故障时是可行的,但是当电机出现故障,输出的实际扭矩不等于驾驶员的需求扭矩,且整车控制器vcu对动力系统的扭矩输出是开环控制,无论是驱动模式还是制动模式,均会出现非驾驶员预期的加速或减速工况。
3.驱动模式下非预期加速状态是指车辆输出的正向驱动力超过驾驶员预期/期望的正向驱动力,例如,车辆油门只踩了10%,对应的整车需求扭矩为50nm,此时车辆匀速行驶能够达到20km/h,但实际电机输出的扭矩却为100nm,使车辆行驶速度达到了50km/h,超过了甚至远超过了驾驶员的预期。驱动模式下非预期减速状态是指驾驶员期望/预期的为正向驱动力,但从整车的实际表现来看却出现了减速的情况,此时整车中的电机处于一种回馈/制动状态,也即要求电机为驱动状态,但此时电机却表现为制动状态。
4.非驱动模式下非预期加速状态是指要求车辆制动但车辆实际表现为输出正向驱动力的情况。例如,正常情况下车辆应该是减速过程,电制动是正常输出的,电机输出的反向力应该是使电流流向电池的(抵消掉电附件后),但是电池实际却表现为一个放电的状态,而且车辆不是一个减速而是一个加速的状态。非驱动模式下非预期减速状态是指电机实际输出的制动功率明显比预期要大。例如,需求制动功率为30kw,但是实际电池充电功率显示为100kw,表现为整车需求减速度为1m/s2,但从整车表现来看减速度实际达到了3m/s2。
5.目前现有技术中对于这几种状态还不能有效地识别,轻则使驾驶员体验差,重则容易出现交通安全事故(由驱动模式下非预期加速状态导致)。
技术实现要素:
6.本发明提供了一种新能源车辆及其车辆输出扭矩控制方法及装置,用以解决现有技术中因没有识别出非预期加速/非预期减速状态而导致驾驶员体验差或者出现交通安全事故的问题。
7.为解决上述技术问题,本发明的技术方案包括:
8.本发明提供了一种新能源车辆输出扭矩控制方法,包括如下步骤:
9.1)判断整车所处的运行模式,是驱动模式还是非驱动模式;
10.2)依据整车所处的运行模式和获取的整车运行参数,采用相应的判别方法,判断整车是否处于驱动模式/非驱动模式下的非预期加速状态/非预期减速状态;所述整车运行参数包括电机功率、电池功率、电附件功率和整车需求功率中的至少三个;
11.3)在确定整车处于驱动模式下的非预期加速状态、驱动模式下的非预期减速状
态、或者非驱动模式下的非预期加速状态时,控制整车输出扭矩为0。
12.上述技术方案的有益效果为:本发明结合电机功率、电池功率、电附件功率和整车需求功率中的至少三个参数,对整车进行功率闭环校验,校核电机的输出功率是否等于整车需求功率,以对非预期加速、非预期减速等状态进行识别,并在确定车辆处于驱动模式下的非预期加速状态、驱动模式下的非预期减速状态、或者非驱动模式下的非预期加速状态时,控制整车输出扭矩为0,以实现对整车的保护,以便在出现这些情况下及时对整车进行处理以保证整车驾驶体验,防止安全事故发生,增加车辆行驶安全性,避免车辆零部件处于异常状态时整车无法识别。
13.进一步的,在确定整车处于非驱动模式下的非预期减速状态时,对整车输出扭矩不做处理。
14.进一步的,为了准确判断整车是否处于驱动模式下的非预期加速状态,确定整车处于驱动模式下的非预期加速状态的判别方法为整车运行参数满足如下条件且持续设定时间以上:
15.η*p
电池-k*p
需求
>p
电附件
、i
电池
>0、i
电机
>0、以及第一条件,所述第一条件为p
电机-k*p
需求
>0或η*p
电池-k*p
电机
>p
电附件
;其中,p
电池
为电池功率,p
电机
为电机功率,p
电附件
为电附件功率,p
需求
为整车需求功率,η为传递效率,k为安全系数,所述整车运行参数还包括电池电流i
电池
和电机电流i
电机
。
16.进一步的,为了准确判断整车是否处于驱动模式下的非预期减速状态,确定整车处于驱动模式下的非预期减速状态的判别方法为整车运行参数满足如下条件且持续设定时间以上:
17.η*p
电池-p
电附件
<p
需求
、以及第二条件,所述第二条件为p
电机
<0或η*p
电机-k*p
电池
>p
电附件
;其中,p
电池
为电池功率,p
电机
为电机功率,p
电附件
为电附件功率,p
需求
为整车需求功率,η为传递效率,k为安全系数。
18.进一步的,为了准确判断整车是否处于非驱动模式下的非预期加速状态,确定整车处于非驱动模式下的非预期加速状态的判别方法为整车运行参数满足如下条件且持续设定时间以上:
19.η*p
电池-p
电附件
>0、以及第三条件,所述第三条件为p
电机
>0或η*p
电池-p
电机
>p
电附件
;其中,p
电池
为电池功率,p
电机
为电机功率,p
电附件
为电附件功率,η为传递效率。
20.进一步的,为了准确判断整车是否处于非驱动模式下的非预期减速状态,确定整车处于非驱动模式下的非预期减速状态的判别方法为整车运行参数满足如下条件且持续设定时间以上:
21.p
电附件-η*p
电池
>k*p
需求
、i
电池
<0、i
电机
<0、以及第四条件,所述第四条件为η*p
电机-k*p
需求
>p
电附件
或η*p
电机-k*p
电池
>p
电附件
;其中,p
电池
为电池功率,p
电机
为电机功率,p
电附件
为电附件功率,p
需求
为整车需求功率,η为传递效率,k为安全系数,所述整车运行参数还包括电池电流i
电池
和电机电流i
电机
。
22.进一步的,为了防止车辆出现快速加减速以及断动力的现象出现,若整车处于驱动模式下的非预期加速状态,仅在整车需求扭矩可以使车辆产生设定加速度时才控制整车输出扭矩为0。
23.进一步的,若整车处于驱动模式/非驱动模式下的非预期加速/非预期加速状态
下,进行相应的上报故障处理。
24.本发明还提供了一种新能源车辆输出扭矩控制装置,包括存储器和处理器,所述处理器用于执行存储在存储器中的指令以实现上述介绍的新能源车辆输出扭矩控制方法,并能达到与该方法相同的有益效果。
25.本发明还提供了一种新能源车辆,包括车辆本体,还包括上述介绍的新能源车辆输出扭矩控制装置,并能达到与该装置相同的有益效果。
附图说明
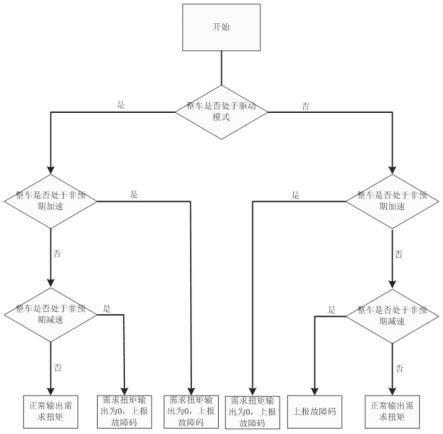
26.图1是本发明的新能源车辆输出扭矩控制方法的流程图;
27.图2是实现本发明的新能源车辆输出扭矩控制方法的系统结构图;
28.图3是本发明的新能源车辆输出扭矩控制装置的结构图。
具体实施方式
29.本发明的基本构思为:本发明认定整车控制器vcu计算出的整车需求功率p
需求
是一个比较准确的数值,而计算出的电机功率p
电机
是并非是准确的(例如,计算出的数值是30kw而电机实际输出却是50kw,从而出现了驱动模式下的非预期加速状态,其他其情况类似),故本发明对电池功率、电机功率、整车需求功率等进行功率闭环校验,以识别出驱动模式和非驱动模式下的非预期加速状态和非预期减速状态,并在识别出这些状态后进行相应的故障报警,实现相应的保护策略。
30.下面结合附图和实施例,对本发明的一种新能源车辆输出扭矩控制方法、一种新能源车辆输出扭矩控制装置和一种新能源车辆进行详细说明。
31.方法实施例:
32.本实施例中的车辆为新能源车辆,其动力源包括动力电池(以下简称为电池)。而且,采用了如图2所示的系统以实施本发明的一种新能源车辆输出扭矩控制方法。该系统包括整车控制器vcu、电机控制器mcu和电池管理系统bms。整车控制器vcu和电机管理系统bms之间可以进行数据交互,电池管理系统bms可以将获取的电池电流和电池电压发送给整车控制器vcu,供整车控制器vcu进行相应的逻辑处理与运算。整车控制器vcu和电机控制器mcu之间也可以进行数据交互,一方面电机控制器mcu可以将获取的电机母线电压、电机母线电流和电机响应扭矩发送给整车控制器vcu,供整车控制器vcu进行相应的逻辑处理与运算,另一方面整车控制器vcu还可将整车需求扭矩发送给电机控制器mcu,使电机控制器mcu控制电机按照整车需求扭矩来工作。其中,整车控制器vcu进行相应的逻辑处理与运算,所能实现的方法包括本发明的一种新能源车辆输出扭矩控制方法,其流程如图1所示,下面具体介绍。
33.步骤一,在车辆运行过程中,在整车控制器vcu和电机控制器mcu之间通讯无故障、以及整车控制器vcu和电池管理系统bms之间通讯无故障的情况下,整车控制器vcu判断车辆所处的运行模式,是驱动模式还是非驱动模式:
34.车辆处于驱动模式时,整车需求扭矩大于0nm,此时执行步骤二。
35.车辆处于非驱动模式时,是指车辆此时处于制动工况或者滑行工况,整车需求扭矩小于等于0nm,此时执行步骤三。
36.步骤二,在车辆处于驱动模式下(理论上理应p
电池
=p
电机
+p
电附件
,此处暂不考虑效率)时,整车控制器vcu对获取的数据进行比较判断,以确定车辆是否处于驱动模式下的非预期加速状态或者驱动模式下的非预期减速状态,并进行相应的处理。具体的:
37.1)整车控制器vcu从电机控制器mcu处获取电机母线电流i
电机
和电机母线电压u
电机
,并根据电机母线电流i
电机
和电机母线电压u
电机
计算得到电机功率p
电机
;整车控制器vcu还从电池管理系统bms处获取电池电流i
电池
和电池电压u
电池
,并根据电池电流i
电池
和电池电压u
电池
计算得到电池功率p
电池
;而且,整车控制器vcu还根据各电附件的电流和电压计算得到电附件功率p
电附件
,根据车型的不同,电附件包括但不限于空调、水泵、电转向、空压机、电除霜、电加热、灯具等,这里的电附件功率p
电附件
为所有电附件的功率之和。
38.2)对获取以及计算得到的数据进行如下比较判断:
39.若满足η*p
电池-k*p
需求
>p
电附件
、i
电池
>0、(p
电机-k*p
需求
>0或η*p
电池-k*p
电机
>p
电附件
)、以及i
电机
>0,且此条件持续满足3秒以后则认为整车处于驱动模式下的非预期加速状态,此时整车控制器vcu输出整车需求扭矩为0的指令给电机控制器mcu,并上报相应的故障码,故障需要整车断b级电后才能重置。而且,在整车需求扭矩可以使车辆产生+0.075m/s2加速度时才激活此功能,否则此功能不激活。其中,η为传递效率,为电机向电池充电时的电损失或者电池向电机放电时的电损失,这两种电损失实际上表现为差不多,故本实施例中针对这两种电损失所对应的传递效率均用η来表示;k为安全系数,相当于设计了一个容错的空间。
40.若满足η*p
电池-p
电附件
<p
需求
、以及(p
电机
<0或η*p
电机-k*p
电池
>p
电附件
),且此条件持续满足3秒以后则认为整车处于驱动模式下的非预期减速状态,此时整车控制器vcu输出整车需求扭矩为0的指令给电机控制器mcu,并上报相应的故障码,故障需要整车断b级电后才能重置。
41.若上述两种情况均不满足,则整车控制器vcu正常输出整车需求扭矩至电机控制器mcu即可。
42.步骤三,在车辆处于非驱动模式下(理论上理应p
电机
=p
电池
+p
电附件
,此处暂不考虑效率)时,整车控制器vcu对获取的数据进行比较判断,以确定车辆是否处于非驱动模式下的非预期加速状态或者非驱动模式下的非预期减速状态,并进行相应的处理。具体的:
43.1)整车控制器vcu从电机控制器mcu处获取电机母线电流i
电机
和电机母线电压u
电机
,并根据电机母线电流i
电机
和电机母线电压u
电机
计算得到电机功率p
电机
;整车控制器vcu还从电池管理系统bms处获取电池电流i
电池
和电池电压u
电池
,并根据电池电流i
电池
和电池电压u
电池
计算得到电池功率p
电池
;而且,整车控制器vcu还根据各电附件的电流和电压计算得到电附件功率p
电附件
,根据车型的不同,电附件包括但不限于空调、水泵、电转向、空压机、电除霜、电加热、灯具等,这里的电附件功率p
电附件
为所有电附件的功率之和。
44.2)对获取以及计算得到的数据进行如下比较判断:
45.若满足η*p
电池-p
电附件
>0、以及(p
电机
>0或η*p
电池-p
电机
>p
电附件
),且此条件持续满足3秒以后则认为整车处于非驱动模式下的非预期加速状态,此时整车控制器vcu输出整车需求扭矩为0的指令给电机控制器mcu,并上报相应的故障码,故障需要整车断b级电后才能重置。
46.若满足p
电附件-η*p
电池
>k*p
需求
、i
电池
<0、(η*p
电机-k*p
需求
>p
电附件
或η*p
电机-k*p
电池
>p
电附件
)、以及i
电机
<0,且此条件持续满足3秒以后则认为整车处于非驱动模式下的非预期减
速状态,此时整车控制器vcu对整车不做动力处理,并上报相应的故障码,故障需要整车断b级电后才能重置。而且,在整车需求扭矩可以使车辆产生-0.075m/s2加速度时才激活此功能,否则此功能不激活。
47.若上述两种情况均不满足,则整车控制器vcu正常输出整车需求扭矩至电机控制器mcu即可。
48.至此,便可完成本发明的一种新能源车辆输出扭矩控制方法。
49.其中,整个方法的实施需要在整车控制器vcu和电机控制器mcu之间通讯无故障、以及整车控制器vcu和电池管理系统bms之间通讯无故障的情况下执行,否则无法实施本发明方法,整个功能无法触发。
50.驱动模式下非预期加速状态与非驱动模式下非预期减速状态在整车需求扭矩可以使车辆产生
±
0.075m/s2加速度时才激活此功能,否则此功能不激活,主要原因为小扭矩下需求扭矩与电机输出扭矩存在一定差异,且不会造成车辆快速加减速,并防止此功能误触发导致车辆断动力。
51.而且,本实施例中安全系数取1.3,即电机输出扭矩不大于整车需求扭矩的30%,传递效率取0.92,两种系数为实验得出。经多次实车实验,电池端能量输出到零部件传递效率为92%,电机输出扭矩超过整车需求扭矩30%时,驾驶员有明显的非预期加速感。
52.装置实施例:
53.本发明的一种新能源车辆输出扭矩控制装置实施例,如图3所示,包括存储器、处理器和内部总线,处理器、存储器之间通过内部总线完成相互间的通信和数据交互。存储器包括至少一个存储于存储器中的软件功能模块,用于存储程序;处理器通过运行存储在存储器中的软件程序以及模块,执行各种功能应用以及数据处理,实现本发明的方法实施例中介绍的一种新能源车辆输出扭矩控制方法,该方法已在方法实施例中做了详细介绍,其流程如图1所示。
54.其中,处理器可以为微处理器mcu、可编程逻辑器件fpga等处理装置,也可为方法实施例中提到的整车控制器vcu。
55.存储器可为利用电能方式存储信息的各式存储器(例如ram、rom等),也可为利用磁能方式存储信息的各式存储器(例如硬盘、软盘、磁带、磁芯存储器、磁泡存储器、u盘等),还可为利用光学方式存储信息的各式存储器(例如cd、dvd等),当然,还可为其他方式的存储器(例如量子存储器、石墨烯存储器等)。
56.车辆实施例:
57.本发明的一种车辆实施例,包括车辆本体(包括车辆壳体等),还包括新能源车辆输出扭矩控制装置,该装置包括存储器和处理器,处理器用于执行存储在存储器中的指令可以实现本发明的一种新能源车辆输出扭矩控制方法。在装置实施例中对该装置已做了详细介绍,在方法实施例中对该方法也已做了详细介绍,这里不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1