用于机器的周边感知系统的制作方法
1.本公开大体上涉及用于监测机器的外部环境的系统。更具体地,本公开涉及一种用于提供机器的周围环境的360度周边感知的系统。
背景技术:
2.已知诸如压实机、铺路机、拖运卡车、推土机、机动平地机、挖掘机、轮式装载机和其它类型设备的许多机器用于执行各种建筑或土方任务。此类机器可配备有感知系统,所述感知系统具有安装在机器上的各种感测单元(例如相机、激光雷达传感器和/或雷达传感器),以便于在操作期间监测机器的周围环境。这些感测单元扫描并且收集与机器周围的工作环境相关联的数据,进一步处理所述数据以映射、检测和/或识别机器周围的工作环境和/或障碍物。
3.在工作现场的操作期间,期望获得对机器周围的工作环境的360度覆盖。通常,为了获得这种360度覆盖,需要将至少四个感测单元安装在机器上,优选地,安装在机器的前部、后部和两侧处。然而,使用至少四个感测单元来处理收集的数据可能很复杂,并且通常需要具有高计算力的高端处理系统。此外,在机器上安装若干此类感测单元需要多个安装硬件,这可显著地有助于机器的总成本和占地面积。
4.美国专利号10,203,412公开一种用于确定机器在工作现场的位置的系统。所述系统包括设置在所述机器上,特别是在前部和相应侧处的多个激光雷达单元,以扫描所述机器周围的物体。每个激光雷达单元由多个激光雷达装置构成,每个激光雷达装置具有180度视场。此类激光雷达装置背对背集成,以形成具有360度视场的一个激光雷达单元。
技术实现要素:
5.在本公开的一个方面,公开了一种用于提供对机器周围的周边区域的360度覆盖的周边感知系统。所述周边感知系统包括构造成安装到所述机器的第一表面的第一感知装置。所述第一感知装置限定相对于所述机器下面的操作表面的第一高程(elevation)和相对于沿着所述机器的高度限定的竖直轴线的第一角度。所述第一感知装置配置成扫描覆盖所述机器的第一周边区域的第一视场,所述第一周边区域包括所述机器的第一横向侧、所述机器的前端的第一部分以及后端的第一部分。另外,所述周边感知系统包括构造成安装到所述机器的第二表面的第二感知装置。所述第二周边装置限定相对于所述操作表面的第二高程和相对于所述竖直轴线的第二角度。所述第二感知装置配置成扫描覆盖所述机器的第二周边区域的第二视场,所述第二周边区域包括与所述机器的第一横向侧相对设置的所述机器的第二横向侧、所述机器的前端的第二部分以及所述机器的后端的第二部分。所述第一视场和所述第二视场组合地提供对机器周围的周边区域的360度覆盖。
6.在另一方面,本公开涉及一种机器,所述机器限定前端、后端、第一横向侧以及与所述第一横向侧相对的第二横向侧。所述机器包括具有第一表面和第二表面的操作员室。另外,所述机器包括安装到所述操作员室的第一表面的第一感知装置。所述第一感知装置
限定相对于所述机器下面的操作表面的第一高程和相对于沿着所述机器的高度限定的竖直轴线的第一角度。所述第一感知装置配置成扫描覆盖所述机器的第一周边区域的第一视场,所述第一周边区域包括所述机器的第一横向侧、所述机器的前端的第一部分和后端的第一部分。另外,所述机器包括安装到操作员室的第二表面的第二感知装置。所述第二感知装置限定相对于所述机器下面的操作表面的第二高程和相对于所述竖直轴线的第二角度。所述第二感知装置配置成扫描覆盖所述机器的第二周边区域的第二视场,所述第二周边区域包括所述机器的第二横向侧、所述机器的前端的第二部分和后端的第二部分。所述第一视场和所述第二视场朝向并且超出所述机器的前端和后端重叠。此外,所述第一视场和所述第二视场组合地提供对机器周围的周边区域的360度覆盖。
附图说明
7.图1是根据本公开的实施例的在工作现场处操作的示例性机器的俯视图;
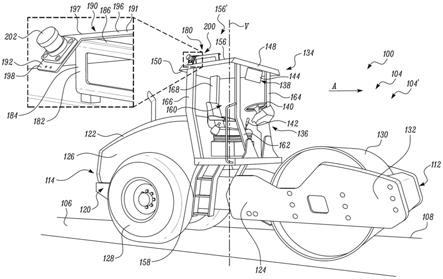
8.图2是根据本公开的实施例的图1的机器的透视图,该机器具有安装在其上的周边感知系统;
9.图3是根据本公开的实施例的机器的前视图;
10.图4是根据本公开的实施例的机器的操作员室的截面视图,其中周边感知系统的感知装置扫描覆盖机器的第一周边区域的第一视场;以及
11.图5是根据本公开的实施例的机器及其周围环境的平面视图,并且示出了由周边感知系统扫描的视场的一部分。
具体实施方式
12.现在将详细参考本公开的实施例,其实例在附图中示出。在所有附图中,将尽可能使用相同的附图标记表示相同或相似的部件。
13.参考图1、2和3,示出了示例性机器100。机器100可以在工作现场102处操作。机器100可以是压实机104(例如,土壤压实机104`),其可以横穿一片工作场地102。机器100可用于压实铺路材料,例如土壤、沙子、砾石、松散基岩、沥青、再生混凝土、沥青混合物或任何其它可压实材料。例如,机器100可包括滚动压实机、板式压实机、自推进压实机、铺路机后方拖带的压实机或本领域已知的任何其它压实装置。本公开的各方面可以适当地应用于执行行业(例如,采矿、铺路、建筑、农业和运输)中的其它操作的其它机器。这些机器可包括土方机器,例如轮式装载机、挖掘机、自卸卡车、反铲挖土机、机动平地机、材料处理机等。
14.机器100可构造成压实机器100下面的操作表面106以形成工作场地102的道路108。操作表面106可以以工作场地102的各种特征为边界,所述各种特征是例如砾石部分110、未铺设道路部分、铺设路面、人员、其它机器、杆、岩石、树木等中的一者或多者。工作现场102的此类特征可以位于道路108的两侧上,或者位于机器100的前方或后方。
15.机器100可构造成在工作现场102处自主地、半自主地或手动地操作。如果机器100自主地操作,则机器100可以基于从机器100的一个或多个传感器接收的信息操作,而不需要操作者输入。举例来说,如果机器100自主地操作,则机器100可以基于来自机器100的一个或多个传感器的输入,自动遵循从一个位置到另一个位置的路径。如果机器100半自主地操作,则操作者可驻留在机器100内或远离机器100驻留,使得一些任务可由操作者执行,而
其它任务可由机器100(例如,基于从各种传感器接收到的信息)自动地执行。举例来说,半自主操作压实机104可以自动遵循从一个位置到另一个位置的路径,但可以依赖于操作者输入来压实操作表面106。手动操作的机器100是操作者可以控制机器100的所有功能的机器。
16.机器100包括前端112和与前端112相对的后端114。可以关于机器100的示例性行进方向(由箭头“a”指示)(参见图2)限定前端112和后端114,其中所述行进方向从后端114朝向前端112限定。另外,机器100包括第一横向侧116和与第一横向侧116相对的第二横向侧118。第一横向侧116和第二横向侧118关于沿着机器100的长度限定的纵向轴线“l”或机器100的示例性行进方向“a”横向定位(也参见图3)。
17.机器100可包括从后端114延伸到前端112的主框架组件120(参见图2)。主框架组件120可包括发动机框架部分122和经由铰接接头(未示出)联接到发动机框架部分122的非发动机框架部分124。尽管论述了铰接的主框架组件(即,主框架组件120),但本公开的各方面可应用于包括非铰接的主框架组件的机器。发动机框架部分122可支承可容纳原动机(未示出)的原动机隔室126。原动机可包括诸如内燃发动机的发动机,其构造成通常通过燃烧燃料来为机器100上的各种系统的操作提供电力。可选地,原动机还可包括可单独应用或可与发动机组合应用的电源。
18.发动机框架部分122可以支承在一对轮128上。轮128可以相对于发动机框架部分122可旋转地安装,并且可以由原动机提供动力以旋转,并且沿着道路108推进机器100。此外,非发动机框架部分124可以支承在滚筒130上。滚筒130可以可旋转地安装到非发动机框架部分124的轭架132,并且可构造成在机器100沿着操作表面106横穿以形成道路108时,在操作表面106上方滚动(和/或以一定频率振动)以压实操作表面106。在操作中,由于轮128可旋转,因此当机器100可在操作表面106上方移动以形成道路108时,轮128可推进机器100,并且可继而使滚筒130在操作表面106上方滚动并且压实该操作表面。
19.机器100包括支承在发动机框架部分122上方的操作员室134。操作员室134可以获取原动机隔室126与滚筒130之间的位置。操作员室134可便于一个或多个操作员驻留在其中,以监测机器100的操作。另外,操作员室134可以容纳意在用于机器在工作现场102上的移动和操作的机器100的各种部件和控件。操作员室134还可容纳一个或多个操作接口,例如一个或多个输入装置136和输出装置138,如图2中所示。在实施例中,输入装置136可包括但不限于方向盘140、操纵杆142、开关(未示出)等。输出装置138可包括但不限于视觉显示单元144。视觉显示单元144可以设置在操作员室134内,以确定与机器100周围的周边区域146有关的视觉数据。备选地,可远程提供视觉显示单元144以使得操作员、监督员、现场检查员以及甚至机器100的自动化控制器能够监测工作场地102处的机器100周围的周边区域146,并且因此控制工作场地102处的机器操作的步速和性质。
20.操作员室134可包括前部部分148和与前部部分148相对的后部部分150。前部部分148和后部部分150沿着机器100的纵向轴线“l”限定(参见图1)。前部部分148可相对于机器100的前端112设置在近侧并且相对于后端114设置在远侧。后部部分150可相对于机器100的后端114设置在近侧并且相对于前端112设置在远侧。另外,操作员室134可包括关于机器100的纵向轴线“l”横向定位的左侧部分152和右侧部分154(参见图3)。右侧部分154可与左侧部分152横向相对。左侧部分152可以朝向机器100的第一横向侧116设置(当从机器100的
前端112观察时,参见图3),而右侧部分154可以朝向机器100的第二横向侧118设置(当从机器100的前端112观察时,参见图3)。
21.操作员室134可包括顶板部分156和沿着竖直轴线“v”定位在顶板部分156下方的底板部分158,该竖直轴线沿着机器100的高度“h”限定。顶板部分156和底板部分158可以从操作员室134的后部部分150延伸到前部部分148。顶板部分156和底板部分158可由多个柱彼此连接以封闭驾驶室空间160(参见图2),并且保护驾驶室空间160免受外部天气和可在工作现场102处遇到的普通恶劣条件的影响。在本实施例中,这些柱可包括四个柱,包括左前柱162、右前柱164、左后柱166和右后柱168。左前柱162和右前柱164可相对于前部部分148设置在近侧并且相对于后部部分150设置在远侧。左后柱166和右后柱168可相对于后部部分150设置在近侧并且相对于前部部分148设置在远侧。顶板部分156可以一体地附接到柱162-168,然而,在一些实施例中,顶板部分156可以与支柱162-168分离。
22.参考图2和3,机器100还包括安装结构180。安装结构180可以附接到操作员室134的顶板部分156。安装结构180可构造成将一个或多个装置和/或传感器(例如,与机器100相关联的感知装置)安装到操作员室134(稍后论述)。安装结构180包括第一框架182、第二框架182`和支架190。第一框架182和第二框架182`可以彼此基本上相同。在本实施例中,第一框架182和第二框架182`分别包括本体部分184、184`,而本体部分184、184`分别限定上部凸缘186、186`和下部凸缘188、188`。在实例中,第一框架182和第二框架182`均可包括c形框架。在另一实例中,第一框架182和第二框架182`均可包括i形框架。
23.第一框架182和第二框架182`安装在顶板部分156的顶部,使得第一框架182的下凸缘188和第二框架182`的下凸缘188`(例如,通过焊接)固定地连接到顶板部分156。在框架(即,第一框架182和第二框架182`)的此类布置中,上凸缘186、186`面朝上并且远离顶板部分156。此外,第一框架182和第二框架182`朝向机器100的任一侧定位,例如,第一框架182可朝向操作员室134的左侧部分152设置(当从机器100的前端112观察时,参见图3),而第二框架182`可朝向操作员室134的右侧部分154设置(当从机器100的前端112观察时,参见图3)。
24.支架190包括本体191,该本体具有第一区段192、第二区段194和横向件196。如图所示,横向件196在第一区段192与第二区段194之间延伸。以该方式,第一区段192和第二区段194设置在横向件196的任一端处。横向件196可以是板形的,并且可以在侧面上是大体上细长的(还参见图5)。此外,横向件196可限定长度“lc”,所述长度可等于由顶板156限定的宽度“w”,或在一些情况下,横向件196的长度“lc”可大于顶板156的宽度“w”。
25.第一区段192和第二区段194中的每一个都可相对于横向件196成角度地设置(或是弯曲的)(例如,具有角偏移)(参见图3)。此外,第一区段192和第二区段194都可以是从横向件196的任一端延伸的一体且连续延伸的区段。就此而言,具有横向件196、第一区段192和第二区段194的支架190可全部一体地形成,但在一些情况下,第一区段192和第二区段194可能是单独的独立部件,其可通过常规的工业紧固技术(例如,焊接)附接到横向件196(或横向件196的端部)。此外,由第一区段192相对于横向件196限定的角偏移可以等于由第二区段194相对于横向件196限定的角偏移,但是在一些情况下,这些角偏移可以彼此不同。尽管不限于此,但由第一区段192限定的形状和轮廓也可以类似于由第二区段194限定的形状和轮廓。在本实施例中,横向件196以及因此作为整体的支架190可相对于机器100的竖直
轴线“v”正交地设置(当从前端112观察时,参见图3)。
26.此外,支架190可安装在第一框架182和第二框架182`上方。在本实施例中,支架190安装到第一框架182的上凸缘186和第二框架182`的上凸缘186`。在将支架190安装在第一框架182和第二框架182`上方时,第一区段192可设置在第一框架182近侧和第二框架182`远侧(当从机器100的前端112观察时,参见图3),而第二区段194可设置在第二框架182`近侧和第一框架182远侧(当从机器100的前端112观察时,参见图3)。此外,第一区段192可以至少部分地向外延伸超出第一横向侧116,并且类似地,第二区段194可以至少部分地向外延伸超出第二横向侧118。
27.在本实施例中,安装结构180可朝向操作员室134的后部部分150设置(参见图1、2和4)。在另一实施例中,安装结构180可朝向操作员室134的前部部分148附接到顶板部分156。尽管安装结构180可如本公开中已提出的那样附接到顶板部分156,但在一些情况下,安装结构180可备选地通过本领域的技术人员可设想的合适的连杆和接头附接到柱162-168中的一个或多个。此外,在一些实施例中,安装结构180也可以与顶板部分156一体地形成。
28.根据本公开的一个方面,顶板部分156连同安装结构180限定机器100的操作员室134的顶板156`。此外,支架190限定顶表面197。限定在第一区段192上的顶表面197限定顶板156`的第一表面198,并且限定在第二区段194上的顶表面197限定156`的第二表面198`。另外,如可以从图2和3可见,顶板156`较高并且沿着竖直轴线“v”在机器100的原动机隔室126和滚筒130上方延伸,并且大体上限定机器100的最上部部分。因此,参考项“顶板156`”可以隐含为指机器100的顶板。
29.参考图2和3,机器100包括用于扫描和覆盖机器100周围的周边区域146的周边感知系统200。周边感知系统200配置成提供对机器100周围的周边区域146的至少360度覆盖。周边感知系统200包括第一感知装置202和第二感知装置204。
30.继续参考图2和3并且还参考图5,第一感知装置202和第二感知装置204中的每一个都配置成扫描相应的视场。例如,第一感知装置202配置成扫描覆盖机器100的第一周边区域504(参见图5)的第一视场502,所述第一周边区域包括机器100的第一横向侧116、机器100的前端112的第一部分508和后端114的第一部分510。类似地,第二感知装置204配置成扫描覆盖机器100的第二周边区域514的第二视场512,所述第二周边区包括机器100的第二横向侧118、机器100的前端112的第二部分518和后端114的第二部分520。
31.第一感知装置202和第二感知装置204中的每一个都可体现为lidar(光探测和测距)装置,其具有预定义竖直视场“f1”和预定义水平视场“f2”。在图3和4中示出了第一感知装置202和第二感知装置204中的每一个的示例性竖直视场“f1”。竖直视场“f1”在第一边界线220与第二边界线222之间延伸,以在其间限定第一视角“α”。在图4中示出了第一感知装置202的示例性水平视场“f2”。水平视场“f2”在第三边界线224与第四边界线226之间延伸,以在其间限定第二视角“β”。
32.在本实施例中,第一感知装置202和第二感知装置204中的每一个都具有在80度至120度范围内的竖直视场(即,第一视角“α”),以及在180度至220度范围内的水平视场(即,第二视角“β”)。在第一实例中,第一感知装置202和第二感知装置204中的每一个都具有90度的竖直视场和220度的水平视场。在第二实例中,第一感知装置202和第二感知装置204中
的每一个都具有95度的竖直视场和210度的水平视场。
33.为了理解本公开的一个或多个方面,现在将限定关于第一实例的第一感知装置202和第二感知装置204的竖直放置。第一感知装置202和第二感知装置204的竖直放置应理解为由第一感知装置202和第二感知装置204扫描的竖直视场在水平轴线“p”上方成+45度角并且在水平轴线“p”下方成-45度角的状态。如图3所示,水平轴线“p”沿着机器100的宽度“w”延伸。此外,关于第二实例,第一感知装置202和第二感知装置204的竖直放置应理解为由第一感知装置202和第二感知装置204扫描的竖直视场在水平轴线“p”上方成+21度角并且在水平轴线“p”下方成-74度角的状态。可以注意到,已经相对于第一实例的第一感知装置202和第二感知装置204论述了本公开的各方面。
34.可以设想,第一感知装置202和第二感知装置204可以备选地体现为另一类型的感知装置,例如radar(无线电探向和测距)装置、sonar(声音导航和测距)装置、相机装置、热扫描仪和/或用于扫描机器100周围的周边区域146的其它类型的装置。
35.第一感知装置202和第二感知装置204朝向机器100的任一侧定位。另外,第一感知装置202和第二感知装置204可以围绕机器100的纵向轴线“l”对称地定位(参见图1)。第一感知装置202安装到机器100的第一表面198(或操作员室134,参见图2和3)。在本实施例中,尽管第一表面198限定在安装结构180的支架190的第一区段192处,但基于诸如空间约束等的因素,第一表面198可改变并且改为限定在顶板部分156上的其它地方,或者第一表面198可限定在设置在机器100的操作员室134的第一横向侧116处的侧面板上。然而,在每个此类变型中,对安装到此类第一表面的第一感知装置202可扫描的视场的覆盖可保持基本上不受影响。
36.如图所示,第一感知装置202安装在安装结构180的第一区段192,或第一区段192上限定的第一表面198上,使得第一感知装置202从第一表面198向外延伸,朝向并且超出机器100的第一横向侧116。此外,第一感知装置202安装在安装结构180的第一区段192,或第一表面198上,使得第一感知装置202限定相对于机器100下面的操作表面106的第一高程“h1”。另外,第一感知装置202安装在安装结构180的第一区段192,或第一表面198上,并且鉴于第一区段192相对于横向件196弯曲或成角度,故第一感知装置202相对于其竖直放置是倾斜的,以向下指向操作表面106来限定相对于竖直轴线“v”的第一角度“γ1”(参见图3)。
37.类似地,第二感知装置204安装到机器100的第二表面198`(或操作员室134,参见图2和3)。在本实施例中,如上文已论述的,第二表面198`限定在安装结构180的支架190的第二区段194处。类似于第一表面198,第二表面198`可改为限定在顶板部分156上的其它地方,或者第二表面198`可限定在设置在机器100的操作员室134的第二横向侧118处的侧面板上。然而,在每个此类变型中,对安装到此类第二表面的第二感知装置204可扫描的视场的覆盖可保持基本上不受影响。
38.此外,第二感知装置204安装在安装结构180的第二区段194,或第二区段194上限定的第二表面198`上,使得第二感知装置204从第二表面198`向外延伸,朝向并且超出机器100的第二横向侧118。此外,第二感知装置204安装在安装结构180的第二区段194,或第二表面198上,使得第二感知装置204限定相对于机器100下面的操作表面106的第二高程“h2”。另外,第二感知装置204安装在安装结构180的第二区段194,或第二表面198`上,并且
鉴于第二区段194相对于横向件196弯曲或成角度,第二感知装置204相对于其竖直放置是倾斜的,以向下指向操作表面106来限定相对于竖直轴线“v”的第二角度“γ2”(参见图3)。
39.在本实施例中,与第一感知装置202相关联的第一角度“γ1”和与第二感知装置204相关联的第二角度“γ2”中的每一个相对于竖直轴线“v”是锐角(参见图3)。更具体地,第一角度“γl”和第二角度“γ2”相对于竖直轴线“v”在10度至60度的范围内。另外,第一角度“γ1”可以等于第二角度“γ2”。在一个实例中,第一角度“γ1”和第二角度“γ2”中的每一个相对于竖直轴线“v”为45度。在另一实例中,第一角度“γ1”和第二角度“γ2”中的每一个相对于竖直轴线“v”为15度。此外,在本实施例中,第一感知装置202的第一高程“h1”等于或小于第二感知装置204的第二高程“h2”。
40.工业适用性
41.在操作期间,随着机器100横穿工作场地102,期望获得对工作场地102的360度覆盖,具体地是对机器100周围的周边区域146的360度覆盖。所公开的周边感知系统200提供对机器100周围的周边区域146的360度覆盖。周边感知系统200通过仅利用两个感知装置来提供360度覆盖,即,第一感知装置202和第二感知装置204,所述第一感知装置安装在第一表面198处,以限定相对于操作表面106的第一高程“h1”和相对于竖直轴线“v”的第一角度“γ1”,所述第二感知装置安装在第二表面198`处,以限定相对于操作表面106的第二高程“h2”和相对于竖直轴线“v”的第二角度“γ2”。
42.由于第一高程“h1”和第一角度“γ1”,第一感知装置202配置成扫描覆盖周边区域146的一部分(即,机器100的第一周边区域504(参见图5))的第一视场502。第一视场502示为从第一边界曲线506朝向第一方向(由箭头“b”指示)延伸。第一周边区域504包括第一横向侧116、机器100的前端112的第一部分508和机器100的后端114的第一部分510。类似地,由于第二高程“h2”和第二角度“γ2”,第二感知装置204配置成扫描覆盖周边区域146的另一部分(即,机器100的第二周边区域514)的第二视场512。第二视场512示为从第二边界曲线516朝向第二方向(由箭头“c”指示)延伸。第二周边区域514包括第二横向侧118、机器100的前端112的第二部分518和机器100的后端114的第二部分520。
43.另外,由第一感知装置202和第二感知装置204两者提供的覆盖也可延伸到操作表面106下方。例如,当机器100接近沿着操作表面106限定的斜面时,这种覆盖度可使得第一感知装置202和第二感知装置204能够沿着该斜面向下扫描。另外,由第一感知装置202和第二感知装置204两者提供的覆盖可以向上延伸超出机器100的顶板156`。这可以使得第一感知装置202和第二感知装置204能够扫描位于顶板156`上方的特征(例如,树枝),并且可以帮助避免机器100与此类特征之间的碰撞。
44.第一视场502和第二视场512可以彼此重叠。在本实施例中,第一视场502和第二视场512分别朝向并且超出机器100的前端112和后端114重叠。更具体地,第一视场502和第二视场512朝向并且超出前端112重叠以形成第一重叠区域522,并且第一视场502和第二视场512朝向并且超出后端114重叠以形成第二重叠区域524(参见图5)。以此方式,第一感知装置202和第二感知装置204均能够扫描第一重叠区域522和第二重叠区域524。
45.在操作中,第一感知装置202扫描第一视场502以生成与机器100周围的第一周边区域504相关联的第一数据。类似地,第二感知装置204扫描第二视场512以生成与机器100周围的第二周边区域514相关联的第二数据。与第一周边区域504相关联的第一数据以及与
第二周边区域514相关联的第二数据例如经由与机器100相关联的控制器(未示出)进行处理,以获得对机器100周围的周边区域146的360度覆盖。
46.在周边感知系统200仅利用上述构造中的安装在机器100上的两个感知装置(即,第一感知装置202和第二感知装置204)的适用性的情况下,获得了对机器100周围的周边区域146的整个360度覆盖。因此,所公开的周边感知系统200减轻了在机器100上在不同位置处安装两个以上感知装置以实现360度覆盖的要求,这最终导致对机器100的感知数据处理能力要求、总成本和占地面积的降低。
47.对于本领域技术人员显而易见的是,在不偏离本公开的范围的情况下,可以对本公开的方法/过程进行各种修改和更改。考虑到所公开的方法/过程的说明书和实践,其它实施例对于本领域技术人员将是显而易见的。说明书和实例应被视为仅是示例性的,本公开的真实范围由下文的权利要求及其等同物指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1