一种机器人自动换电系统及其电池更换方法与流程
1.本发明涉及消杀机器人技术领域,尤其涉及一种机器人自动换电系统及其更换电池的方法。
背景技术:
2.随着人类社会的不断发展和研究探索,越来越多的病毒和细菌被人类发现,并对这些病毒和细菌的毒理有了进一步的了解,有些病毒和细菌已经在人类之间进行传播,严重影响了人类的生命安全,且随着人类的活动范围逐渐扩大,也加速了病毒在人类之间的扩散速率,故消杀机器人应运而生。目前,比较常见的消杀机器人上设置有紫外线杀菌灯,并为其配置自动行驶的功能,在消杀机器人行驶的过程中,通过紫外线杀菌灯对行驶区域进行杀菌,以达到杀菌的效果,但是,现有的消杀机器人仍然存在如下弊端:
3.1、消杀机器人在执行消杀工作时,需要为机器人本体上的紫外线杀菌灯不断供能,使其能够进行消毒杀菌工作,因此耗电较大,消杀工作时间较短,且大多采用人工充电或充电桩充电的速度较慢,充电时间长,降低机器人本体的消杀工作效率;
4.2、现有的消杀机器人在进行工作时,由于电池模块受其自身电量的限制,不能根据其自身电量合理安排其工作状态与流程,难以使其发挥出自身的优势;
5.3、若采用方法对消杀机器人进行补充电能,通常会采用人工对机器人本体上的电池模块进行更换,但此方法不易掌握对机器人本体中电池模块的电量,不能够准确安排消杀机器人的工作时长,且需要投入一定的人力与物力,因此自动化程度不高,实用性不强。
技术实现要素:
6.本发明的主要目的是解决现有技术中所存在的问题,提供一种机器人自动换电系统及其更换电池的方法。
7.为解决上述技术问题,本发明采用的技术方案是:一种机器人自动更换电池的换电系统,包括云端服务器、维护站、机器人本体和电池模块,其中:
8.所述云端服务器,用于管理和监测维护站的运行状态,用于监测机器人本体中电池模块的剩余电量,还用于管理机器人本体的消杀工作状态;
9.所述维护站,用于统计其内部电池模块的数量和电量,用于对其内部的电池模块进行储存与充电,还用于更换机器人本体上的电池模块,
10.所述机器人本体,用作消杀工作的工作载体;
11.所述电池模块,用于为机器人本体提供电能。
12.进一步地,所述维护站包括更换室、分别设置于更换室内部的电池更换单元和采集模块,其中:
13.所述更换室,用于为机器人本体提供换电场所;
14.所述电池更换单元,用于对机器人本体上的电池模块进行更换;
15.所述采集模块,用于采集更换室内部电池模块的数量和检测电池模块的电量。
16.进一步地,所述更换室内部还设置有储存架和充电装置,所述储存架用于存放电池模块,所述充电装置用于对储存架上的电池模块进行充电。
17.进一步地,所述电池更换单元包括图像识别装置和电池更换装置,所述图像识别装置设置于电池更换装置上,由所述图像识别装置对电池模块的位置进行检测与识别,所述电池更换装置设置于更换室的内壁上。
18.进一步地,所述图像识别装置设置为深度相机。
19.进一步地,所述电池更换装置包括升降机构、纵向位移机构、横向位移机构和夹持机构,所述升降机构设置于更换室的内壁上,所述纵向位移机构连接于升降机构的输出端,所述横向位移机构连接于纵向位移机构的输出端,所述夹持机构连接于横向位移机构的输出端,且该夹持机构与图像识别装置相连接。
20.进一步地,所述升降机构包括第一滑台、第一丝杠、第一电机和第一连接座,所述第一滑台设置于更换室的侧壁上,所述第一丝杠转动设置于第一滑台上,所述第一电机设置于第一滑台上,其输出端与第一丝杠的输入端相连接,所述第一连接座旋配套设于第一丝杠上,且该第一连接座滑动设置于第一滑台上。
21.进一步地,所述纵向位移机构包括第二滑台、第二丝杠、第二电机和第二连接座,所述第二滑台连接于第一连接座上,所述第二丝杠转动设置于第二滑台上,所述第二电机设置于第二滑台上,其输出端与第二丝杠的输入端相连接,所述第二连接座旋配套设于第二丝杠上,且该第二连接座滑动设置于第二滑台上。
22.进一步地,所述横向位移机构包括第三滑台、第三丝杠、第三电机和第三滑座,所述第三滑台连接于第二连接座上,所述第三丝杠转动设置于第三滑台上,所述第三电机设置于第三滑台上,其输出端与第三丝杠的输入端相连接,所述第三连接座旋配套设于第三丝杠上,且该第三连接座滑动设置于第三滑台上。
23.进一步地,所述夹持机构包括第四滑台、第四丝杠、第四电机、滑动夹持部和固定夹持部,所述第四滑台连接于第三连接座上,所述第四丝杠转动设置于第四滑台上,所述第四电机设置于第四滑台上,其输出端与第四丝杠的输入端相连接,所述滑动夹持部旋配套设于第四丝杠上,且该滑动夹持部滑动设置于第四滑台上,所述固定夹持部设置于第四滑台的底部,由所述滑动夹持部和固定夹持部对电池模块进行夹取。
24.进一步地,所述机器人本体上设置有电池装配槽,所述电池装配槽内设置有锁紧组件,所述锁紧组件用对安装于电池装配槽内的电池模块进行锁紧固定。
25.进一步地,所述电池装配槽的内部设置有弹出组件,所述弹出组件用于辅助电池模块弹出电池装配槽。
26.进一步地,所述弹出组件包括定位孔、弹簧和定位柱,所述定位孔开设于电池装配槽内,所述弹簧设置于定位孔内,其端部与定位孔的内壁相连接,所述定位柱的一端连接于电池模块上,其另一端与定位孔的结构相配合。
27.进一步地,所述电池模块上还设置有多组弹性电极。
28.一种机器人自动更换电池的方法,包括如下步骤:
29.步骤一、云端服务器实时控制机器人本体执行消杀工作,并实时监测机器人本体上电池模块的电量,在电池模块中的电量低于预设值的情况下,云端服务器向机器人本体发出指令,控制机器人本体驶入更换室内进行换电;
30.步骤二、由电池更换单元对机器人本体上的电池模块进行更换;
31.步骤三、更换室内的采集模块对其内部的电池模块的数量和电量进行采集与检测,并将获取后的数据信息传输给云端服务器,由云端服务器控制维护站为更换后的电池模块补充电能。
32.进一步地,在步骤一当中,所述机器人本体设置为多组,由所述云端服务器控制多组机器人本体执行消杀工作和进入维护站内进行换电。
33.进一步地,在步骤二当中,机器人本体控制锁紧组件打开,解除其对电池模块的锁紧作用,并由弹出组件辅助电池模块弹出电池装配槽,电池更换单元中的图像识别装置对机器人本体上电池模块的位置进行识别,再由电池更换装置对电池模块进行拆卸,并将其放到储存架上进行存储,由储存架上的充电装置对更换后的电池模块进行充电,再由电池更换装置抓取另一个满电状态的电池模块装入到机器人本体的电池装配槽中,在由机器人本体控制锁紧组件对电池模块进行锁紧固定;
34.进一步地,在步骤二当中,所述锁紧组件设置为电磁锁。
35.本发明具有的优点和积极效果是:
36.(1)本发明结构新颖,稳定可靠,利用维护站内设置的电池更换单元,能够自动进入到更换室内电池模块的电量低于预设值机器人本体进行换电操作,使其能够在短时间对机器人本体快速补充电能,与原有的人工充电和充电桩充电相比,节省了机器人本体补充电能的时间,有利于提高机器人本体的工作效率;
37.(2)本发明中利用云端服务器对维护站进行管理,能够对维护站内的电池模块的数量进行统计,以便于根据电池模块的数量来确定维护站所能承载机器人本体的数量,同时,维护站内的采集模块还能够对电池模块的剩余电量进行检测,确保云端服务器能够及时控制充电装置对电量不足的电池模块进行充电,保证维护站内始终存在满电状态下的电池模块;同时,采用维护站内设置的电池更换单元,能够实现对机器人本体上的电池模块进行自动拆卸与更换,节省了人力与物力,具有较高的自动化程度和较好的实用性;
38.(3)本发明利用云端服务器控制机器人本体执行消杀工作,解决了消杀过程难监管,消杀结果难管控的问题,降低人工消杀的所带来的的感染风险,使得整个消杀过程更加数据化与可视化,并保证整个消杀过程更科学可靠。
附图说明
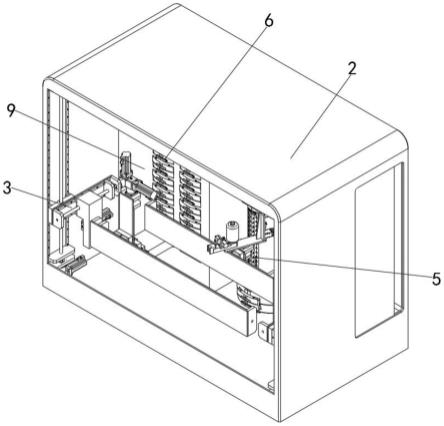
39.图1是本发明的结构示意图;
40.图2是电池更换单元的结构示意图;
41.图3是维护站、机器人本体和充电装置与维护站之间的电性连接关系框图;
42.图4是电池模块与弹出组件、锁紧组件与电极之间的连接结构示意图。
43.图中:1、云端服务器;2、更换室;3、电池更换单元;31、图像识别装置;32、电池更换装置;321、升降机构;3211、第一滑台;3212、第一丝杠;3213、第一电机;3214、第一连接座;322、纵向位移机构;3221、第二滑台;3222、第二丝杠;3223、第二电机;3224、第二连接座;323、横向位移机构;3231、第三连接座;3232、第三丝杠;3233、第三电机;3234、第三滑座;324、夹持机构;3241、第四滑台;3242、第四丝杠;3243、第四电机;3244、滑动夹持部;3245、固定夹持部;4、采集模块;5、机器人本体;6、电池模块;7、锁紧组件;8、弹出组件;81、定位
孔;82、弹簧、 83、定位柱;84、弹性电极;9、储存架;10、充电装置。
具体实施方式
44.为了更好的理解本发明,下面结合具体实施例和附图对本发明进行进一步的描述。
45.如图1-图4所示,一种机器人自动更换电池的换电系统,包括云端服务器1、维护站、机器人本体5和电池模块6,其中:
46.云端服务器1,用于管理和监测维护站的运行状态,能够对维护站统计的电池模块6的数量以及电量进行获取与收集,以使维护站能够及时对其内部电量不足的电池模块6进行充电,并且能够根据电池模块6的数量来确定维护站维护站所能服务的机器人本体5的数量;用于监测机器人本体5中电池模块6的剩余电量,当机器人本体5上的电池模块6中剩余电量低于预设值时,控制机器人本体5能够及时进入维护站内进行换电;还用于管理机器人本体5的消杀工作状态,以使机器人本体5能够根据自身电量的多少来限制自身的消杀范围与工作时长,保证机器人本体5在有限的电量能够及时返回维护站内进行换电;
47.维护站,用于统计其内部电池模块6的数量和电量,并将所获得的数据信息传递给云端服务器1,以便于云端服务器1对维护站内的电池模块6进行管理,用于对其内部的电池模块6进行储存与充电,及时为电量过低的电池模块6补充电能,保证维护站内储存有满电状态的电池模块6,还用于更换机器人本体5上的电池模块6,以保证能对机器人本体5进行快速换电,确保消杀工作的持续进行;
48.机器人本体5,用作消杀工作的工作载体,由该机器人本体5对周围环境进行杀菌消毒;
49.电池模块6,用于为机器人本体5提供电能,以使机器人本体5能够与工作区域内运行并执行消杀工作。
50.进一步地,维护站包括更换室2、分别设置于更换室2内部的电池更换单元3和采集模块4,其中:
51.更换室2,用于为机器人本体5提供换电场所;
52.电池更换单元3,用于对机器人本体5上的电池模块6进行更换,使其将机器人本体5上电量低于预设值的电池模块6拆卸下来,并将维护站内处于充满状态下的电池模块6安装于机器人本体5上,为其消杀工作提供电能;
53.采集模块4,用于采集更换室2内部电池模块6的数量和检测电池模块 6的电量,采集模块4能够实时的对更换室2内电池模块6的数量和电池模块6的电量进行信息采集,并将所采集的数据信息传递给云端服务器1,以供云端服务器1进行处理计算,通过采集电池模块6的数量,能够确定该维护站所能服务的机器人本体5的数量,即维护站内处于满电状态的电池均处于备用状态,可用于更换到电池模块6电量低于预设值的机器人本体5当中,且通过对维护站内各个电池模块6中的电量进行检测,能够及时对未处于满电状态的电池模块6进行充电,确保维护站内存在满电备用状态的电池模块 6。
54.进一步地,更换室2内部还设置有储存架9和充电装置10,储存架9 用于存放电池模块6,充电装置10用于对储存架9上的电池模块6进行充电,以为未处于满电状态的电池模块6提供电能,直至使电池模块6充满并处于备用状态。
55.进一步地,电池更换单元3包括图像识别装置31和电池更换装置32,图像识别装置31设置于电池更换装置32上,由图像识别装置31对电池模块6的位置进行检测与识别,电池更换装置32设置于更换室2的内壁上,图像识别装置31设置为深度相机,电池更换装置32包括升降机构321、纵向位移机构322、横向位移机构323和夹持机构324,升降机构321设置于更换室2的内壁上,纵向位移机构322连接于升降机构321的输出端,横向位移机构323连接于纵向位移机构322的输出端,夹持机构324连接于横向位移机构323的输出端,且该夹持机构324与图像识别装置31相连接,在对机器人本体5进行换电时,利用图像识别装置31对机器人本体5上电池模块6的位置进行识别,使得电池更换装置32能够准确的将电池模块6拆卸下来,并且能够将拆卸下来的电池放入到储存架9上进行充电,同时还能识别储存架9上处于满电状态的电池模块6,并将其准确的安装于电池装配槽中;且电池更换装置32中设置的升降机构321能够调节电池安装模块的安装高度,通过纵向位移机构322和横向位移机构323的配合使用能够调节电池模块6于水平面上的安装位置,并利用夹持机构324对电池模块6进行夹取,从而实现电池模块6的拆卸与安装。
56.进一步地,升降机构321包括第一滑台3211、第一丝杠3212、第一电机3213和第一连接座3214,第一滑台3211设置于更换室2的侧壁上,第一丝杠3212转动设置于第一滑台3211上,第一电机3213设置于第一滑台3211 上,其输出端与第一丝杠3212的输入端相连接,第一连接座3214旋配套设于第一丝杠3212上,且该第一连接座3214滑动设置于第一滑台3211上,第一电机3213带动第一丝杠3212进行转动,带动旋配于第一丝杠3212上的第一连接座3214进行运动,使第一连接座3214于第一滑台3211上进行上升或下降运动,以对电池更换装置32的竖直高度进行调节。
57.进一步地,纵向位移机构322包括第二滑台3221、第二丝杠3222、第二电机3223和第二连接座3224,第二滑台3221连接于第一连接座3214上,第二丝杠3222转动设置于第二滑台3221上,第二电机3223设置于第二滑台3221上,其输出端与第二丝杠3222的输入端相连接,第二连接座3224 旋配套设于第二丝杠3222上,且该第二连接座3224滑动设置于第二滑台 3221上,横向位移机构323包括第三滑台、第三丝杠3232、第三电机3233 和第三滑座3234,第三滑台连接于第二连接座3224上,第三丝杠3232转动设置于第三滑台上,第三电机3233设置于第三滑台上,其输出端与第三丝杠3232的输入端相连接,第三连接座3231旋配套设于第三丝杠3232上,且该第三连接座3231滑动设置于第三滑台上,通过纵向位移机构322和横向位移机构323的配合使用,能够调节夹持机构324的水平位置,进而对夹持的电池模块6的水平位置进行调节,转动的第二电机3223会带动第二丝杠3222进行转动,使其带动第二连接座3224与第二丝杠3222进行运动,以使第二连接座3224与水平位置上沿第二滑台3221进行纵向滑动,并带动横向位移机构323进行运动;同时,横向位移机构323中的第三电机3233 带动第三丝杠3232进行转动,带动旋配套设于第三丝杠3232上的第三连接座3231进行运动,以使第三滑座3234于第三滑台上进行横向滑动,从而对夹持机构324的横向进行调节,进而实现对夹持机构324所夹取的电池模块 6的水平位置进行调节。
58.进一步地,夹持机构324包括第四滑台3241、第四丝杠3242、第四电机3243、滑动夹持部3244和固定夹持部3245,第四滑台3241连接于第三连接座3231上,第四丝杠3242转动设置于第四滑台3241上,第四电机3243 设置于第四滑台3241上,其输出端与第四丝杠3242的输入端相连接,滑动夹持部3244旋配套设于第四丝杠3242上,且该滑动夹持部3244滑动
设置于第四滑台3241上,固定夹持部3245设置于第四滑台3241的底部,由滑动夹持部3244和固定夹持部3245对电池模块6进行夹取,在对电池模块6 进行夹取时,使电池模块6处于滑动夹持部3244和固定夹持部3245之间,由第四电机3243带动第四丝杠3242进行转动,并由第四丝杠3242带动滑动夹持部3244向固定夹持部3245靠近,直至使两者抵靠并对电池模块6进行夹持,以实现对电池模块6的夹取。
59.进一步地,机器人本体5上设置有电池装配槽,电池装配槽内设置有锁紧组件7,锁紧组件7用对安装于电池装配槽内的电池模块6进行锁紧固定,从而使电池模块6安装于电池装配槽内并对机器人本体5进行供电。
60.进一步地,电池装配槽的内部设置有弹出组件8,弹出组件8用于辅助电池模块6弹出电池装配槽,弹出组件8包括定位孔81、弹簧82和定位柱 83,定位孔81开设于电池装配槽内,弹簧82设置于定位孔81内,其端部与定位孔81的内壁相连接,定位柱83的一端连接于电池模块6上,其另一端与定位孔81的结构相配合,在对电池模块6进行拆卸时,解除锁紧组件7 对电池模块6的,此时利用弹出组件8中弹簧82的弹力推动定位柱83,由定位柱83带动电池模块6移出一段距离,以便于夹持机构324对其进行夹取;同理,在对电池模块6进行安装时,将电池模块6装入到,此时定位柱83相配合插入到定位孔81当中,并对弹簧82进行压缩,当电池模块6安装到位后再由锁紧组件7对其进行锁紧固定,完成电池模块6的装配。
61.进一步地,电池模块6上还设置有多组弹性电极84,由于弹性电极84 具有弹力,使得电池模块6装配完成能够与机器人本体5的上的电极更好的对接,从而保证电池模块6能够稳定的对机器人本体5进行供电。
62.另外,上述中所涉及的第一滑台3211和更换室2内壁之间、第一连接座3214于第二滑台3221之间、第二连接座3224于第三连接座3231之间、第三滑座3234于第四滑台3241之间可采用栓接的方式进行连接;其中电池模块6可采用锂离子电池、镍氢电池、铅酸电池活钠硫蓄电池等,采集模块 4可才用具有计数功能和检测电量的功能的装置,云端服务器1、第一电机 3213、第二电机3223、第三电机3233、第四电机3243、深度相机、电磁锁、弹性电极84、采集模块4、机器人本体5、电池模块6、充电装置10的具体结构和工作原理均属于本技术领域现有技术,本发明未对其进行改进,且第一电机3213、第二电机3223、第三电机3233、第四电机3243、深度相机、电磁锁、弹性电极84、采集模块4、机器人本体5、电池模块6、充电装置 10与云端服务器1之间的电性控制关系、电性控制原理和电性控制方式均属于本技术领域现有技术,本发明未对其进行改进,故不再赘述。
63.本发明结构新颖,稳定可靠,利用维护站内设置的电池更换单元3,能够自动进入到更换室2内电池模块6的电量低于预设值机器人本体5进行换电操作,使其能够在短时间对机器人本体5快速补充电能,与原有的人工充电和充电桩充电相比,节省了机器人本体5补充电能的时间,有利于提高机器人本体5的工作效率;本发明中利用云端服务器1对维护站进行管理,能够对维护站内的电池模块6的数量进行统计,以便于根据电池模块6的数量来确定维护站所能承载机器人本体5的数量,同时,维护站内的采集模块4 还能够对电池模块6的剩余电量进行检测,确保云端服务器1能够及时控制充电装置10对电量不足的电池模块6进行充电,保证维护站内始终存在满电状态下的电池模块6;同时,采用维护站内设置的电池更换单元3,能够实现对机器人本体5上的电池模块6进行自动拆卸与更换,节省了人力与物力,具有较高的自动化程度和较好的实用性;本发明利用云端服务器1控制机器人本体
5执行消杀工作,解决了消杀过程难监管,消杀结果难管控的问题,降低人工消杀的所带来的的感染风险,使得整个消杀过程更加数据化与可视化,并保证整个消杀过程更科学可靠。
64.本发明的具体工作原理如下:
65.机器人本体5在执行消杀工作时,由云端服务器1实时控制机器人本体 5,并实时监测机器人本体5上电池模块6的电量,在电池模块6中的电量低于预设值的情况下,云端服务器1向机器人本体5发出指令,控制机器人本体5驶入更换室2内进行换电;由电池更换单元3对机器人本体5上的电池模块6进行更换;机器人本体5控制锁紧组件7打开,解除其对电池模块 6的锁紧作用,并由弹出组件8辅助电池模块6弹出电池装配槽,电池更换单元3中的图像识别装置31对机器人本体5上电池模块6的位置进行识别,再由电池更换装置32对电池模块6进行拆卸,并将其放到储存架9上进行存储,由储存架9上的充电装置10对更换后的电池模块6进行充电,再由电池更换装置32抓取另一个满电状态的电池模块6装入到机器人本体5的电池装配槽中,在由机器人本体5控制锁紧组件7对电池模块6进行锁紧固定;更换室2内的采集模块4对其内部的电池模块6的数量和电量进行采集与检测,并将获取后的数据信息传输给云端服务器1,由云端服务器1控制维护站为更换后的电池模块6补充电能。
66.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1