虚拟车速计算方法、装置、车载终端、车辆及存储介质与流程
本技术一般涉及车辆,尤其涉及虚拟车速计算方法、装置、车载终端、车辆及存储介质。
背景技术:
1、随着车辆技术的发展,使得车辆上能够实现的功能越来越多。如提供越来越完善的娱乐设施,包括车载游戏等。
2、目前,车载游戏都需要从所开发的游戏程序中获取适于车辆运行的游戏参数,如赛车类游戏中的虚拟车速等,以用于车辆场景。
3、对于从游戏程序中获取的游戏参数,使得操作时的体验不佳。另外,部分游戏并不提供数据接口,使得无法获取游戏参数。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种虚拟车速计算方法、装置、车载终端、车辆及存储介质,通过获取实体车辆中加速踏板及制动踏板的实时数据帧,利用自学习得到计算模型,实现模拟驾驶程序中模拟车辆的虚拟车速的计算。
2、第一方面,本技术实施例提供了一种虚拟车速计算方法,该方法包括:
3、获取其所在的实体车辆的加速踏板及制动踏板的数据帧;
4、基于该数据帧计算当前运行程序中的模拟车辆的速度因子,应用于实体车辆的车载终端上的模拟驾驶程序,该实体车辆包括加速踏板和制动踏板,该加速踏板和该制动踏板用于操控该模拟驾驶程序上的模拟车辆,该方法包括:
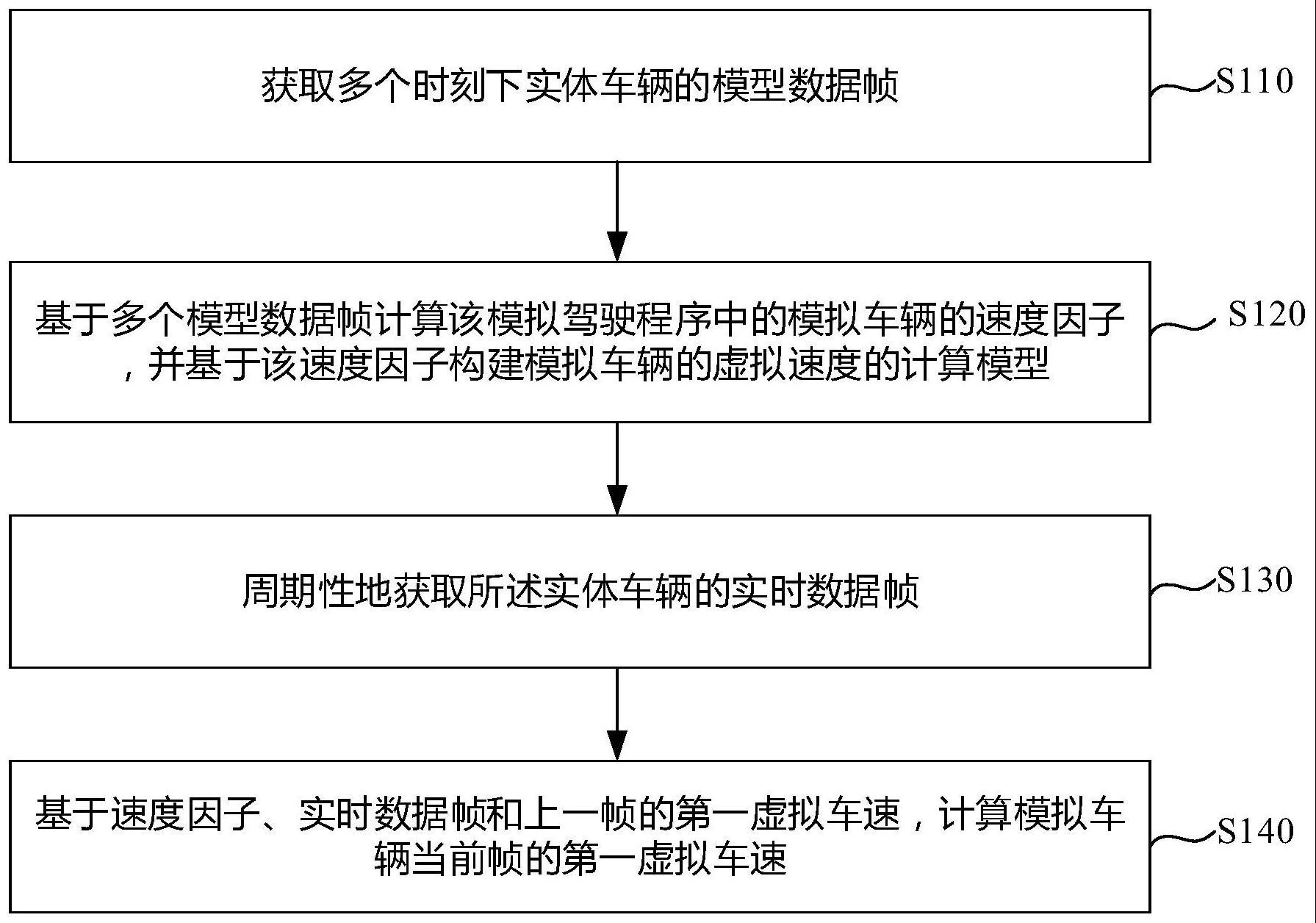
5、获取多个时刻下该实体车辆的模型数据帧,其中,每个模型数据帧包括一个加速踏板深度模型值,和一个制动踏板深度模型值。
6、基于多个模型数据帧计算模拟驾驶程序中模拟车辆的速度因子。
7、周期性的获取该实体车辆的实时数据帧,其中,每个实时数据帧包括一个加速踏板深度实时值和一个制动踏板深度实时值。
8、基于该速度因子、实时数据帧以及上一数据帧的第一虚拟车速,计算该模拟车辆当前帧的第一虚拟车速,其中,该第一虚拟车速用于表示该模拟车辆在模拟驾驶程序中的移动速度。可选的,本技术的虚拟车速计算方法的一些实施例中,该基于多个该模型数据帧计算该模拟驾驶程序中的模拟车辆的速度因子,包括:
9、基于该模型数据帧,计算场景车速因子;
10、基于该场景车速因子以及场景车速状态表,确定与该场景车速因子对应的场景车速,该场景车速状态表包括场景车速因子与场景车速的对应关系;
11、根据该场景车速和该模型数据帧,计算该速度因子。
12、可选的,本技术的虚拟车速计算方法的一些实施例中,该速度因子包括加速因子、减速因子和阻力因子;
13、根据该场景车速和该模型数据帧,计算该速度因子,包括:
14、当确定的该场景车速的个数小于三个时,则该方法返回执行该获取多个时刻下该实体车辆的模型数据帧;
15、当确定的该场景车速的个数等于三个时,根据三组该场景车速及其对应的该模型数据帧,确定该加速因子、该减速因子和该阻力因子。
16、可选的,本技术的虚拟车速计算方法的一些实施例中,该获取多个时刻下该实体车辆的模型数据帧,包括:在预设时间内依次获取预设数量的该实体车辆的模型数据帧;
17、该基于该模型数据帧,计算场景车速因子,包括:
18、统计多个该模型数据帧内该加速踏板深度模型值为有效值的第一最大连续个数,并计算该第一最大连续个数对应的多个该加速踏板深度模型值的和为加速踏板深度有效累加值;其中,该加速踏板深度模型值大于或等于第一预设深度时,该加速踏板深度模型值为有效值;
19、统计多个该模型数据帧内该制动踏板深度模型值为有效值的第二最大连续个数,并计算该第二最大连续个数对应的多个该制动踏板深度模型值的和为制动踏板深度有效累加值;其中,该制动踏板深度模型值大于或等于第二预设深度时,该制动踏板深度模型值为有效值;
20、统计多个该模型数据帧内该加速踏板深度模型值和该制动踏板深度模型值均不为有效值的第三最大连续个数;
21、基于该加速踏板有效累加值、该制动踏板有效累加值以及该第三最大连续个数计算该场景车速因子。
22、可选的,本技术的虚拟车速计算方法的一些实施例中,该统计多个该模型数据帧内该加速踏板深度模型值为有效值的第一最大连续个数,并计算该第一最大连续个数对应的多个该加速踏板深度模型值的和为加速踏板深度有效累加值,包括:
23、统计多个该模型数据帧内该加速踏板深度模型值为有效值的第一最大连续个数;
24、若该第一最大连续个数大于第一上限个数,则在该第一最大连续个数对应的多个该加速踏板深度模型值中选取与该第一上限个数对应数量的该加速踏板深度模型值,并求和得到该加速踏板深度有效累加值;
25、若该第一最大连续个数小于或等于第一上限个数,则将该第一最大连续个数对应的多个该加速踏板深度模型值求和得到该加速踏板深度有效累加值;
26、和/或
27、该统计多个该模型数据帧内该制动踏板深度模型值为有效值的第二最大连续个数,并计算该第二最大连续个数对应的多个该制动踏板深度模型值的和为制动踏板深度有效累加值,包括:
28、统计多个该模型数据帧内该制动踏板深度模型值为有效值的第二最大连续个数;
29、若该第二最大连续个数大于第二上限个数,则在该第二最大连续个数对应的多个该制动踏板深度模型值中选取与该第二上限个数对应数量的该制动踏板深度模型值,并求和得到该制动踏板深度有效累加值;
30、若该第二最大连续个数小于或等于第二上限个数,则将该第二最大连续个数对应的多个该制动踏板深度模型值求和得到该制动踏板深度有效累加值;
31、和/或
32、该统计多个该模型数据帧内该加速踏板深度模型值和该制动踏板深度模型值均不为有效值的第三最大连续个数,包括:
33、统计多个该模型数据帧内该加速踏板深度模型值和该制动踏板深度模型值均不为有效值的第三最大连续个数;
34、若该第三最大连续个数大于第三上限个数,则将该第二最大连续个数更新为该第三上限个数。
35、可选的,本技术的虚拟车速计算方法的一些实施例中,该基于该加速踏板有效累加值、该制动踏板有效累加值以及该第三最大连续个数计算该场景车速因子,包括:
36、将该加速踏板有效累加值、制动踏板有效累加值和该第三最大连续个数代入公式一:
37、场景车速因子=加速踏板有效累加值/(制动踏板有效累加值+第三最大连续个数×n);其中,n为怠速因子。
38、可选的,本技术的虚拟车速计算方法的一些实施例中,在基于该加速踏板有效累加值、该制动踏板有效累加值以及该第三最大连续个数计算该场景车速因子之后,该方法还包括:
39、当该场景车速因子大于第一预设阈值,或小于第二预设阈值时,表示该场景车速因子无效,则该方法返回执行该在预设时间内依次获取预设数量的该实体车辆的模型数据帧;
40、其中,该第一预设阈值大于该第二预设阈值。
41、可选的,本技术的虚拟车速计算方法的一些实施例中,该速度因子包括加速因子、减速因子和阻力因子;
42、根据该场景车速和该模型数据帧,计算该速度因子,包括:
43、当确定的该场景车速的个数小于三个时,则该方法返回执行该在预设时间内依次获取预设数量的该实体车辆的模型数据帧;
44、当确定的该场景车速的个数等于三个时,将三组该场景车速及其对应的该加速踏板有效累加值、该制动踏板有效累加值代入以下公式二:
45、场景车速=a×加速踏板有效累加值-b×制动踏板有效累加值-c×第三最大连续个数);其中,a为该加速因子,b为该减速因子,c为该阻力因子;
46、根据三组公式确定该加速因子、该减速因子和该阻力因子。
47、可选的,本技术的虚拟车速计算方法的一些实施例中,该速度因子包括加速因子、减速因子和阻力因子;
48、该基于该速度因子、该实时数据帧和该上一周期计算的第一虚拟车速,计算该模拟车辆当前周期的第一虚拟车速,包括:
49、将该上一帧的第一虚拟车速、该加速踏板深度实时值和该制动踏板深度实时值代入以下公式三:
50、当前帧的第一虚拟车速=上一帧的第一虚拟车速+i×(a×加速踏板深度实时值-b×制动踏板深度实时值-c);其中,a为该加速因子,b为该减速因子,c为该阻力因子,i为预设帧率常数。
51、第二方面,本技术实施例提供一种车速计算装置,该装置应用于实体车辆的车载终端上的模拟驾驶程序,该实体车辆包括加速踏板和制动踏板,该加速踏板和该制动踏板用于操控该模拟驾驶程序上的模拟车辆,其特征在于,该装置包括:
52、第一获取模块,用于获取多个时刻下该实体车辆的模型数据帧;其中,每个该模型数据帧包括一个加速踏板深度模型值和一个制动踏板深度模型值;
53、第一计算模块,用于基于多个该模型数据帧计算该模拟驾驶程序中的模拟车辆的速度因子;
54、第二获取模块,用于周期性地获取该实体车辆的实时数据帧;其中,每个该实时数据帧包括一个加速踏板深度实时值和一个制动踏板深度实时值;
55、第二计算模块,用于基于该速度因子、该实时数据帧和该上一帧的第一虚拟车速,计算该模拟车辆当前帧的第一虚拟车速;其中,该第一虚拟车速用于表示该模拟车辆在该模拟驾驶程序上的移动速度。
56、第三方面,本技术实施例提供一种车载终端,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行该程序时实现如上述第一方面所述的虚拟车速计算方法。
57、第四方面,本技术实施例提供一种实体车辆,该实体车辆包括:
58、车载终端、加速踏板及制动踏板;
59、该车载终端上存储有模拟驾驶程序,且运行该模拟驾驶程序时,执行如第一方面所述的虚拟车速计算方法;
60、该加速踏板和该制动踏板用于操控该模拟驾驶程序上的模拟车辆。
61、第五方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序用于实现如上第一方面所述的虚拟车速计算方法。
62、本技术实施例提供的虚拟车速计算方法、装置、车载终端、车辆及存储介质,车载终端运行模拟驾驶程序后,首先通过获取其所在的实体车辆多个时刻下的包括加速踏板深度模型值及制动踏板深度模型值的模型数据帧,进而通过对获取的模型数据帧进行自学习,计算当前运行的模拟驾驶程序中的模拟车辆的速度因子,以构建虚拟速度计算模型,然后获取该实体车辆的加速踏板深度实时值和制动踏板深度实时值,以利用构建的虚拟速度计算模型,以及实时数据帧,计算运行的模拟驾驶程序中模拟车辆当前帧的虚拟车速,实现模拟驾驶程序中模拟车辆的虚拟车速的实时准确计算,该方法通过建立算法模型,能够适配不同的模拟驾驶程序类型,无需从程序中提取真实参数,无需定制模拟驾驶程序,能够使得在运行该模拟驾驶程序时,依据该虚拟车速操控实体车辆的部件,以与模拟驾驶程序中的场景进行真实的互动,增强操作者体验。
- 还没有人留言评论。精彩留言会获得点赞!