一种基于GPS定位的无人驾驶车辆除味系统及方法与流程
一种基于gps定位的无人驾驶车辆除味系统及方法
技术领域
1.本技术涉及车辆除味技术领域,尤其涉及基于gps定位的无人驾驶车辆除味系统及方法。
背景技术:
2.无人驾驶车辆作为接驳车的场景越来越多,在接驳过程中,车辆处于无人且封闭状态,可能会产生异味,目前车辆仅依靠乘客上下过程中的开门及上车后的空调进行空气净化。
3.公开号为cn107215169a的中国专利申请公开了一种车辆及其车内空气质量优化装置、优化方法,包括:空气质量检测单元,适于检测空气质量并包括第一检测子单元,所述第一检测子单元适于检测车内空气中的co2浓度;判断单元,适于判断所述第一检测子单元检测到的所述co2浓度是否高于设定的第一阈值;通讯单元,适于在所述判断单元判断出所述co2浓度高于所述第一阈值时发送空调外循环通风指令,所述空调外循环通风指令用于开启空调外循环通风功能。车内空气质量优化装置包括空气质量检测单元、判断单元和执行单元,其中,空气质量检测单元适于检测空气质量并包括适于检测车内空气中co2浓度的第一检测子单元,判断单元适于判断第一检测子单元检测到的所述co2浓度是否高于设定的第一阈值,通讯单元适于在所述判断单元判断出所述co2浓度高于所述第一阈值时发送空调外循环通风指令,以开启空调外循环通风功能。开启空调外循环通风功能之后,车外的新鲜空气能够进入车内,从而减小了车内空气的co2浓度,减轻了车辆用户的疲劳症状。
4.公开号为cn110789294a的中国专利申请公开了一种汽车自动通风系统,包括车身控制模块及与车身控制模块相连的车窗玻璃升降电机、车门解锁键,所述车身控制模块还与汽车遥控钥匙通讯连接;所述车身控制模块接收到车门解锁键或汽车遥控钥匙的车门解锁信号后进行通风作业,所述通风作业如下:车身控制模块控制车窗玻璃升降电机的工作,使车窗玻璃在车门解锁后下降预定高度,并在降窗时间达到预定的通风时间后,关闭车窗玻璃。针对新车气味重,甲醛挥发慢等特性,通过自动通风作业,给消费者提供了一个更安全健康的车内环境,整套系统在硬件上无需进行大幅改动,具有更改零部件数量少,成本低的特点,方案容易被整机厂接受,具有很好的实用性。
5.然而上述现有技术中虽然公开了通过检测环境条件或者预设条件开启自动净化空气装置实现车辆除味净化,但上述技术中均存在无法实现智能、高效的除味控制。
技术实现要素:
6.本技术提供一种基于gps定位的无人驾驶车辆除味系统及方法,以解决相关技术存在的问题,技术方案如下:第一方面,本技术提供了一种基于gps定位的无人驾驶车辆除味系统,包括:车载单元(obu)控制器,所述车载单元控制器中设置有用于接收招车指令的无线通讯模块;
空气质量传感器,用于检测车内空气质量;空调,用于调节车内空气质量,所述空调包括用于控制空调运行和接收所述空气质量传感器传输数据的空调控制器,所述空调控制器包括数据处理模块;自动控制驾驶器,所述自动控制驾驶器包括车辆自动驾驶控制模块,以及用于计算行驶至招车点所需时间的测量模块;组合惯导,接收gps信号实现车辆定位;其中,所述车载单元控制器、所述自动驾驶控制器分别通过can线与所述空调连接,所述空气质量传感器与所述空调为电连接,所述组合惯导与所述自动控制驾驶器为电连接。
7.进一步的,所述空调还包括鼓风机、内外循环电机,所述鼓风机、所述内外循环电机分别与所述空调控制器电连接。
8.进一步的,所述空调控制器还包括用于调节鼓风机占空比的控制模块。
9.进一步的,所述空调的空气净化速率为0.3-10μg/m3。
10.第二方面,本技术提供了一种基于gps定位的无人驾驶车辆除味方法,所述方法采用如前所述的系统,所述方法包括如下步骤:1)车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;2)自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位置信号;3)自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t,并将时间信号发送至空调控制器;4)空调控制器向空气质量传感器发送测量空气质量指令并接收空气质量传感器传输的空气质量;5)空调控制器根据获得的空气质量n、预先设定的目标空气质量n0、到站所需时间计算所需的空调净化速率并以此控制空调进行空气净化。
11.进一步的,所述空气质量为空气中pm2.5的含量。
12.进一步的,所述预先设定的目标空气质量n0≤35μg/m3。
13.进一步的,所述空调的空气净化速率为0.3-10μg/m3。
14.进一步的,所述空调的控制包括:5.1)判断获得的空气质量n与预先设定的目标空气质量n0之间的关系;5.2)当n≤n0时,不开启空调;当n>n0时,采用公式t
max
=(n-n0)/v
min
计算得到空气净化所需的最长时间t
max
,采用公式t
min
=(n-n0)/v
max
计算得到空气净化所需的最短时间t
min
,其中v
min
为空调最小净化速率,单位为μg/s,v
max
为空调最大净化速率,单位为μg/s;判断所述到站所需时间t与所述最长时间t
max
、所述最短时间t
min
之间的关系,并执行下述步骤:5.2.1)当t
max
<t时,暂不开启空调,在车辆移动过程中自动驾驶控制器持续监测计算到站所需时间,直至t
max
=t时,空调控制器控制空调按最小净化速率进行净化;5.2.2)当t
min
<t≤t
max
时,空调控制器根据模型v=(n-n0)/t调节空调净化速率v;5.2.3)当t≤t
min
时,空调控制器控制空调按最大净化速率进行净化。
15.进一步的,所述空调的净化速率通过控制鼓风机占空比实现,所述占空比m=(v/v
max
)
×
100%。
16.进一步的,所述空调进行空气净化时,空调控制器将内外循环电机的工作模式调节为外循环模式。
17.上述技术方案中的优点或有益效果至少包括:通过检测车内空气质量判断是否需要除味,通过开启空调鼓风机进行除味,通过车内空气质量及到达乘客站点时间进行鼓风机开启及风量大小判断,除味具有准确性和高效性。
18.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本技术进一步的方面、实施方式和特征将会是容易明白的。
附图说明
19.在附图中,除非另外规定,否则贯穿多个附图相同的附图标记表示相同或相似的部件或元素。这些附图不一定是按照比例绘制的。应该理解,这些附图仅描绘了根据本技术公开的一些实施方式,而不应将其视为是对本技术范围的限制。
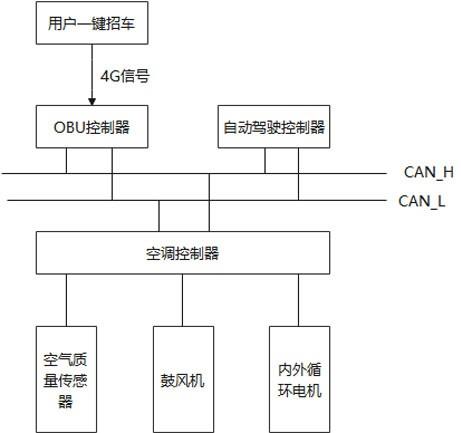
20.图1为根据本技术实施例的基于gps定位的无人驾驶车辆除味系统的结构框图。
具体实施方式
21.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本技术的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
22.图1示出根据本技术实施例的基于gps定位的无人驾驶车辆除味系统的结构框图,包括车载单元(obu)控制器,所述车载单元控制器中设置有用于接收招车指令的无线通讯模块;空气质量传感器,用于检测车内空气质量;空调,用于调节车内空气质量,所述空调包括用于控制空调运行和接收所述空气质量传感器传输数据的空调控制器,所述空调控制器包括数据处理模块;自动控制驾驶器,所述自动控制驾驶器包括车辆自动驾驶控制模块,以及用于计算行驶至招车点所需时间的测量模块;组合惯导(未示出),接收gps信号实现车辆定位;其中,所述车载单元控制器、所述自动驾驶控制器分别通过can线与所述空调连接,所述空气质量传感器与所述空调为电连接,所述组合惯导与所述自动控制驾驶器为电连接。
23.在一种实施方式中, 所述空调包括鼓风机和内外循环电机,所述空调控制器与所述鼓风机和所述内外循环电机电连接,在运行过程中,空调控制器驱动鼓风机执行除味功能,同时调节内外循环电机至外循环模式。
24.在一种实施方式中,所述空调控制器还包括用于调节鼓风机占空比的控制模块,在运行过程中,空调控制器根据其数据处理模块计算得出的鼓风机占空比调节鼓风机至适宜的风量。
25.本技术实施例还提供了一种采用前述除味系统的无人驾驶车辆除味方法,所述方法采用如前所述的系统,所述方法包括如下步骤:1)车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;2)自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位
置信号;3)自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t,并将时间信号发送至空调控制器;4)空调控制器向空气质量传感器发送测量空气质量指令并接收空气质量传感器传输的空气质量;5)空调控制器根据获得的空气质量n、预先设定的目标空气质量n0、到站所需时间计算所需的空调净化速率并以此控制空调进行空气净化。
26.在一种实施方式中,所述空气质量n为空气中pm2.5的含量。
27.在一种实施方式中,所述预先设定的目标空气质量n0≤35μg/m3。
28.在一种实施方式中,预设目标空气质量n0=35μg/m3,本实施例中车辆空调的空气净化速率为0.3-10μg/m3;车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位置信号;自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t为600s,并将时间信号发送至空调控制器;空调控制器向空气质量传感器发送测量空气质量指令,空气质量传感器测定的车内空气质量n=100μg/m3,并将该信息传输至空调控制器;空调控制器对n与n0的关系进行判断为n>n0,根据t
max
=(n-n0)/v
min
计算得到除味所需的最长时间t
max
为217s,小于到站所需时间,此时暂不开启空调,在车辆移动过程中自动驾驶控制器持续监测计算到站所需时间,当到站时间达到217s时,空调控制器控制空调以0.3μg/m3净化速率除味。
29.在一种实施方式中,上述净化速率通过控制鼓风机占空比实现,此时占空比m=(v/v
max
)
×
100%=(0.3/10)
×
100%=30%。
30.在一种实施方式中,预设目标空气质量n0=35μg/m3,本实施例中车辆空调系统的空气净化速率为0.3-10μg/m3;车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位置信号;自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t为150s,并将时间信号发送至空调控制器;空调控制器向空气质量传感器发送测量空气质量指令,空气质量传感器测定的车内空气质量n=300μg/m3,并将该信息传输至空调控制器;空调控制器对n与n0的关系进行判断为n>n0,根据t
max
=(n-n0)/v
min
计算得到除味所需的最长时间t
max
为884s、根据t
min
=(n-n0)/v
max
计算得到除味所需的最长时间t
min
为26.5s,经判断,t
min
<t<t
max
,此时空调控制器控制空调以(n-n0)/t=(300-35)/150=1.77μg/m3净化速率除味。
31.在一种实施方式中,上述净化速率通过控制鼓风机占空比实现,此时占空比m=(v/v
max
)
×
100%=(1.77/10)
×
100%=17.7%。
32.在一种实施方式中,预设目标空气质量n0=35μg/m3,本实施例中车辆空调系统的空气净化速率为0.3-10μg/m3;车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位置信号;自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t为30s,并将时间信号发送至空调控制器;空
调控制器向空气质量传感器发送测量空气质量指令,空气质量传感器测定的车内空气质量n=400μg/m3,并将该信息传输至空调控制器;空调控制器对n与n0的关系进行判断为n>n0,根据t
max
=(n-n0)/v
min
计算得到除味所需的最长时间t
max
为1217s、根据t
min
=(n-n0)/v
max
计算得到除味所需的最长时间t
min
为36.5s,经判断,t≤t
min
,此时空调控制器控制空调以最大净化速率10μg/m3除味。
33.在一种实施方式中,上述净化速率通过控制鼓风机占空比实现,此时占空比m=(v/v
max
)
×
100%=(10/10)
×
100%=100%。
34.在一种实施方式中,预设目标空气质量n0=35μg/m3,本实施例中车辆空调系统的空气净化速率为0.3-10μg/m3;车载单元控制器接收招车指令后将信号发送至自动驾驶控制器;自动驾驶控制器向组合惯导发出车辆定位指令,并接收组合惯导传输的车辆位置信号;自动驾驶控制器根据组合惯导传输的车辆位置信号、车载单元控制器传输的乘客位置信号、当前车速以及车速规划计算到站所需时间t为30s,并将时间信号发送至空调控制器;空调控制器向空气质量传感器发送测量空气质量指令,空气质量传感器测定的车内空气质量n=30μg/m3,并将该信息传输至空调控制器;空调控制器对n与n0的关系进行判断为n<n0,此时不开启空调。
35.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1