带多画面盲区倒车辅助系统的货车监控的制作方法
1.本发明涉及行车记录仪技术领域。具体地说是带多画面盲区倒车辅助系统的货车监控。
背景技术:
2.随着货运、物流行业的发展,对货车的需求量逐步增加,货车的体型大,导致在驾驶员在驾驶车辆的过程中,存在较多的视觉盲区,存在一定的危险。
3.为了解决上述问题,开发出了具有监控功能的行车记录仪,从而减少视觉盲区,但是货车在行使中,路况的复杂性较大,存在颠簸路段且会产生较大的灰尘,颠簸会导致摄像头松动和拍摄画面晃动幅度较大,影响正常拍摄,而灰尘附着在摄像头上会导致画面不清,甚至导致无法拍摄的情况。
技术实现要素:
4.为此,本发明所要解决的技术问题在于提供一种能够减少视觉盲区、自动清理并减少画面晃动幅度的带多画面盲区倒车辅助系统的货车监控。
5.为解决上述技术问题,本发明提供如下技术方案:带多画面盲区倒车辅助系统的货车监控,包括主机系统、外摄系统和自动清理系统,所述外摄系统与主机系统通信连接,所述自动清理系统固定在货车上,所述外摄系统固定在所述自动清理系统上;所述主机系统包括处理器模块、内存模块、储存模块、lcd显示模块、物联网模块、音频模块和高清录制模块,所述内存模块、所述储存模块、所述lcd显示模块、所述物联网模块、所述音频模块和所述高清录制模块均与所述处理器模块电连接,所述外摄系统与所述高清录制模块电连接;所述自动清理系统包括安装机构、储能机构和清洗机构,所述安装机构的一端与货车车体固定连接,所述外摄系统固定在所述安装机构的另一端上,所述储能机构的清洗介质出口端与所述清洗机构的清洗介质入口端流体导通,所述清洗机构安装在所述外摄系统上,所述清洗机构的清洗介质出口端位于所述外摄系统的表面上。
6.本发明的技术方案取得了如下有益的技术效果:
7.1、本发明,通过设置平行四边形结构安装机构,并在两个拉簧的配合下,保持了摄像头能够稳定的固定在货车车体上,在遇到颠簸时,车体与摄像头之间并非直接的刚性连接,车体颠簸不会直接传递至摄像头上,由于摄像头存在惯量,车体的颠簸传递至铰接架上,铰接架通过摆动减少晃动,从而避免摄像头收到大幅度的颠簸,保证拍摄画面的质量;且平行四边形结构在运动时,连接板处于不同位置状态时,均能处于平行状态,使摄像头仅上下运动,而不是沿一个旋转点周向摆动,摄像头沿一个点摆动后,即使摄像头摆动较小的角度,画面也会出现较大的偏差,且拍摄距离越远,影响越大,从而保证画面不会有大幅度的晃动,进而保证拍摄效果。
8.2、本发明,通过设置储能机构,能够利用安装机构的相对运动,带动连接杆端部的齿扇驱动齿轮转动,从而使两个压缩组件分别将空气和清洗液压入储能组件内,进行不断
的储蓄压力,同时,由于压入液体和气体存在一定的阻力,起到阻尼的作用,减少安装机构的晃动时间;通过设置储能组件,能够存储清洗液和气体的压力,并在达到预定压力值后,自动打开连接管,将具有压力的气液喷出,清洗摄像头,储能组件能够储存一定的压力,且释放压力时,密封板的开启受弹簧的限制,而不是弹性拉带的限制,使得气液排放的压力损失较小,同时能够便于使气液最大程度的释放出去。
9.3、本发明,通过设置小型水轮机,能够在具有压力的气液喷出时,驱动小型水轮机转动,从而驱动刮板转动,对摄像头的面板进行清理,具有压力的气液和转动的刮板相互配合,提高清理效果;通过设置定位轮、弹簧伸缩杆和滚轮,能够起到对刮板定位的作用,避免刮板处于摄像头的拍摄区域,避免阻挡拍摄;通过设置多个摄像头,并分别设置在车辆的四周,组成多画面实时监控,最大程度的降低货车存在的盲区,从而实现在货车倒车时,实现倒车辅助。
附图说明
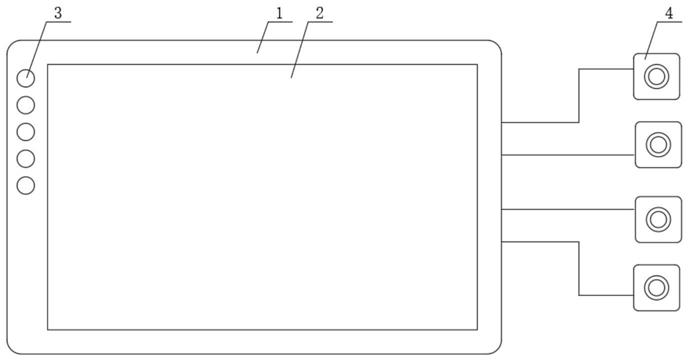
10.图1本发明的整体结构示意图;
11.图2本发明中自动清理系统与外摄系统的装配立体图;
12.图3本发明中自动清理系统与外摄系统的装配侧视图;
13.图4本发明中自动清理系统与外摄系统的装配侧视剖面图;
14.图5本发明中齿轮和曲轴装配在连接箱内的俯视剖面示意图;
15.图6本发明中压缩组件的侧视剖面结构示意图;
16.图7本发明中储能组件的侧视剖面结构示意图;
17.图8本发明图7的a处放大结构示意图;
18.图9本发明中定位轮的侧视结构示意图;
19.图10本发明物联网模块的电路图;
20.图11本发明按键模块的电路图;
21.图12本发明lcd显示模块的电路图;
22.图13本发明储存模块和usb模块的电路图;
23.图14本发明音频模块的电路图;
24.图15本发明嵌入式多媒体控制器和gps的电路图;
25.图16本发明内存模块的电路图;
26.图17本发明处理器模块的电路图;
27.图18本发明高清录制模块的电路图。
28.图中附图标记表示为:1-外壳;2-屏幕;3-按键;4-摄像头;5-自动清理系统;501-连接箱;502-铰接架;503-连接板;504-拉簧;505-铰接耳;506-连接杆;507-固定板;508-弧形槽;509-齿扇;510-齿轮;511-曲轴;512-曲轴连杆;513-活塞筒;514-第一活塞;515-进口管;516-进口单向阀;517-出口管;518-出口单向阀;519-储能箱;520-连接管;521-外筒;522-滑杆;523-弹簧;524-第二活塞;525-卡杆;526-密封板;527-弹性拉带;528-固定箱;529-小型水轮机;530-刮板;531-定位轮;532-弹簧伸缩杆;533-滚轮。
具体实施方式
29.本实施中的带多画面盲区倒车辅助系统的货车监控,请参阅图1-2,包括主机系统、外摄系统和自动清理系统,所述外摄系统与主机系统通信连接,所述自动清理系统固定在货车上,所述外摄系统固定在所述自动清理系统上;所述主机系统包括处理器模块、内存模块、储存模块、lcd显示模块、物联网模块、音频模块和高清录制模块,所述内存模块、所述储存模块、所述lcd显示模块、所述物联网模块、所述音频模块和所述高清录制模块均与所述处理器模块电连接,所述外摄系统与所述高清录制模块电连接;所述自动清理系统包括安装机构、储能机构和清洗机构,所述安装机构的一端与货车车体固定连接,所述外摄系统固定在所述安装机构的另一端上,所述储能机构的清洗介质出口端与所述清洗机构的清洗介质入口端流体导通,所述清洗机构安装在所述外摄系统上,所述清洗机构的清洗介质出口端位于所述外摄系统的表面上。
30.所述外摄系统包括四个的摄像头4,所述摄像头4与所述高清录制模块电连接;如图3所示,所述安装机构包括连接箱501、铰接耳505、铰接架502和连接板503,所述连接箱501的侧壁四角均固定连接有所述铰接耳505,所述连接箱501的一侧上方和一侧下方对称设置有所述铰接架502,所述连接箱501的另一侧与所述货车车体固定连接,所述铰接架502的一端两侧与所述连接箱501侧壁上的铰接耳505铰接,所述铰接架502的另一端两侧与所述连接板503的侧壁铰接,所述连接箱501、两个所述铰接架502和所述连接板503铰接构成平行四边形,两个所述铰接架502的中部均固定连接有拉簧504,所述拉簧504的另一端与所述连接箱501的侧壁固定连接,所述连接板503远离所述铰接架502的侧壁上两侧均固定连接有固定板507,所述固定板507的中部转动连接有转轴;所述转轴的端部与所述摄像头4侧壁固定连接,所述固定板507的侧壁上与转轴同轴开设有弧形槽508,所述弧形槽508内穿有螺栓,所述螺栓的另一端与所述摄像头4的侧壁螺纹连接,通过设置平行四边形结构安装机构,并在两个拉簧504的配合下,保持了摄像头4能够稳定的固定在货车车体上,在遇到颠簸时,车体与摄像头4之间并非直接的刚性连接,车体颠簸不会直接传递至摄像头4上,由于摄像头4存在惯量,车体的颠簸传递至铰接架502上,铰接架502通过摆动减少晃动,从而避免摄像头4收到大幅度的颠簸,保证拍摄画面的质量;且平行四边形结构在运动时,连接板503处于不同位置状态时,均能处于平行状态,使摄像头4仅上下运动,而不是沿一个旋转点摆动,摄像头4沿一个点摆动后,即使摄像头4摆动较小的角度,画面也会出现较大的偏差,且拍摄距离越远,影响越大,从而保证画面不会有大幅度的晃动,进而保证拍摄效果。
31.如图4、图5所示,所述储能机构包括连接杆506、铰接座、齿扇509、齿轮510、曲轴511、压缩组件和储能组件,所述连接杆506的第一端与所述连接板503的侧壁中部铰接,所述连接箱501的侧壁中部固定连接有铰接座,所述连接杆506的中部与所述铰接座铰接,所述连接杆506第一端的铰接点位于两个所述铰接架502一端铰接点的连接线上,所述连接杆506的第二端插入所述连接箱501内并与所述齿扇509固定连接,所述曲轴511两端的轴端分别与所述连接箱501内壁两侧转动连接,所述齿轮510固定连接在所述曲轴511的中部,所述连接箱501内通过固定架固定连接有两个所述压缩组件,两个所述压缩组件的动力输入端均与所述曲轴511驱动连接;所述储能组件固定连接在所述连接箱501的内顶壁上,两个所述压缩组件的出口端均与所述储能组件的进口端流体导通,所述储能组件的出口端与所述清洗机构流体的进口端导通,通过设置储能机构,能够利用安装机构的相对晃动,带动连接
杆506端部的齿扇509驱动齿轮510转动,从而使两个压缩组件分别将空气和清洗液压入储能组件内,进行不断的储蓄压力,同时,由于压入液体和气体存在一定的阻力,起到阻尼的作用,减少安装机构的晃动时间;通过设置储能组件,能够存储清洗液和气体的压力,并在达到预定压力值后,自动打开连接管520,将具有压力的气液喷出,清洗摄像头4,储能组件能够储存一定的压力,且释放压力时,密封板526的开启受弹簧523的限制,而不是弹性拉带527,使得气液的压力损失较小,同时能够便于使气液最大程度的释放出去。
32.如图5、图6所示,所述压缩组件包括活塞筒513、第一活塞514和曲轴连杆512,所述第一活塞514密封配合在所述活塞筒513内,所述曲轴连杆512的第一端与所述第一活塞514的顶部铰接,所述曲轴连杆512的第二端与所述曲轴511的一个曲轴轴颈转动连接,所述活塞筒513的底部分别流体导通有进口管515和出口管517,所述进口管515上设置有进口单向阀516,所述出口管517上设置有出口单向阀518,所述活塞筒513通过所述固定架固定在所述连接箱501内;如图7、图8所示,所述储能组件包括储能箱519、连接管520、密封板526和外筒521,所述连接管520固定连接在所述储能箱519的侧壁下部,所述连接管520的侧壁下端与所述储能箱519的侧壁下端流体导通,所述密封板526设置在所述连接管520内,所述密封板526的一侧与所述连接管520的内侧壁铰接,所述外筒521的一固定连接在与所述连接管520的侧壁上,所述连接管520内密封配合有第二活塞524,所述第二活塞524远离所述连接管520的一侧上固定连接有滑杆522,所述滑杆522的另一端穿出所述外筒521的端部并固定连接有限位块,所述滑杆522上套有弹簧523,所述弹簧523的一端与所述第二活塞524的侧壁搭接,所述弹簧523的另一端与所述外筒521的端部内壁搭接,所述第二活塞524靠近所述连接管520的一侧上固定连接有卡杆525,所述卡杆525的端部穿出所述连接管520的侧壁,且所述卡杆525侧壁挡在所述密封板526的侧壁上,所述卡杆525的端部为倾斜面,所述第二活塞524远离所述连接管520侧的密封空间与外界大气流体导通,所述第二活塞524靠近所述连接管520侧的密封空间与储能箱519流体导通;两个所述压缩组件底部的出口管517均与所述储能箱519流体导通,所述连接管520的顶端与所述小型水轮机529的进口端流体导通。
33.如图2、图4和图9所示,所述清洗机构包括固定箱528、小型水轮机529、刮板530和定位轮531,所述小型水轮机529固定在所述固定箱528内,所述小型水轮机529的输出轴穿出所述固定箱528的侧壁,所述小型水轮机529的输出轴上沿其径向固定连接有所述刮板530,所述刮板530的侧壁贴合在所述摄像头4的侧壁上,在实际使用中,可在刮板530的侧壁上设置刷毛、软胶挂条等,以提高清理效果,所述小型水轮机529的进口端与所述连接管520的顶端流体导通,所述小型水轮机529的出口端流体导通有喷头,所述喷头位于所述摄像头4上并朝向摄像头4设置,所述定位轮531同轴固定连接在所述小型水轮机529的输出轴上,所述定位轮531的周向侧壁上设置有与所述刮板530位置相互对应的圆弧凸起,所述固定箱528的内顶壁上固定连接有弹簧伸缩杆532,所述弹簧伸缩杆532的端部设置有滚轮533,所述滚轮533的侧壁抵顶在所述定位轮531的周向侧壁上,通过设置小型水轮机529,能够在具有压力的气液喷出时,驱动小型水轮机529转动,从而驱动刮板530转动,对摄像头4的面板进行清理,具有压力的气液和转动的刮板530相互配合,提高清理效果;通过设置定位轮531、弹簧伸缩杆532和滚轮533,能够起到对刮板530定位的作用,避免刮板530处于摄像头4的拍摄区域,避免阻挡拍摄;通过设置多个摄像头4,最大程度的降低货车存在的盲区。
34.如图13、图17所示,所述处理器模块包括处理器芯片,所述处理器芯片的型号为mt6762v,所述处理器芯片连接有usb模块,所述usb模块,所述usb模块包括连接器con1、电容cu1和电容cu2,所述连接器con1的引脚1与所述电容cu1和所述电容cu2的一端连接并输入usbvbus,所述电容cu1和所述电容cu2的另一端接地,所述连接器con1的引脚2与所述处理器芯片的引脚g22连接,所述连接器con1的引脚2与所述处理器芯片的引脚g23连接,所述连接器con1的引脚4接地,所述连接器con1的引脚6和引脚5连接并接地;所述处理器芯片的引脚j20连接vcc-usb,所述处理器芯片的引脚j18连接vdd-usb;如图14所示,所述音频模块包括芯片u5、插座j3和插座j32,所述芯片u5的引脚1上连接有电阻r50、电阻r51和电阻r52,所述电阻r50的第一端输入vcc-3v3,所述电阻r50的第二端与所述电阻r51的第一端连接,所述电阻r51的第二端接地,所述电阻r52的第一端连接功放,所述电阻r52的第二端与所述电阻r50的第二端连接并与芯片u5的引脚1连接,所述芯片u5的引脚2连接有电容c56,所述电容c56的另一端接地,所述芯片u5的引脚3连接模式切换,所述芯片u5的引脚4连接有电阻r57,所述电阻r57的另一端连接有电容c0402,所述电容c0402的另一端连接耳机输出,所述芯片u5的引脚8连接有电容c55和双向瞬态抑制二极管d8,所述电容c55和所述双向瞬态抑制二极管d8的第一端与所述插座j3的引脚2连接,所述芯片u5的引脚5连接有电容c54和双向瞬态抑制二极管d9,所述电容c54和所述双向瞬态抑制二极管d9的第一端与所述插座j3的引脚1连接,所述电容c55和所述电容c54的第二端相连并接地,所述双向瞬态抑制二极管d8和所述双向瞬态抑制二极管d9的第二端相连并接地,所述插座j3的引脚3和引脚4相连并接地,所述电容c55的第一端连接测试点tp23,所述电容c54的第一端连接测试点tp22,所述芯片u5的引脚7和引脚9分别接地,所述芯片u5的引脚6与有极电容ce10的正极和电容ca1的第一端连接,所述有极电容ce10的负极和所述电容ca1的第二端相连并接地,所述电容ca1的第一端连接有稳压二极管d10,所述稳压二极管d10的负极与所述电容ca1的第一端连接,所述稳压二极管d10的正极输入vcc-5vin-b,所述稳压二极管d10的两端并联有铁氧体磁珠fb12;所述处理器芯片的引脚a13连接有电容c65,所述处理器芯片的引脚b13连接有电容c70,所述电容c65的第二端连接有电阻r56,所述电容c70的第二端连接有电阻r60,所述电阻r56的第二端和所述电阻r60的第二端分别与电容c68的两端连接,所述电阻r56的第二端连接有电阻r55,所述电阻r55的第二端连接有电容c62,所述电容c62的第二端接地,所述电容c62的第一端与所述处理器芯片的引脚b15连接,所述电阻r60的第二端连接有电阻r61,所述电阻r61的第二端接地,所述电容c65的第二端连接有电容c67,所述电容c67的第二端与所述电容c70的第二端连接,所述电容c67的第一端连接有电容c64,所述电容c64的另一端接地,所述电容c67的第二端连接有电容c72,所述电容c72的另一端接地,所述电容c67的第一端与所述插座j32的引脚1连接,所述电容c67的第二端与所述插座j32的引脚2连接,所述插座j32的引脚1连接micin1-con+并连接测试点tp47,所述插座j32的引脚2连接micin1-con并连接测试点tp48,所述插座j32的引脚3和引脚4连接并接地。
35.所述处理器芯片的引脚d21和引脚d22连接有晶振x1,所述晶振x1的引脚1与所述处理器芯片的引脚d21连接并与测试点tp49连接,所述晶振x1的引脚2与所述处理器芯片的引脚d22连接并与测试点tp50连接,所述晶振x1的引脚3接地,所述晶振x1的引脚4接地,所述晶振x1的引脚1连接有电容c16,所述晶振x1的引脚2连接有电容c20,所述电容c16的第二端与所述电容c20的第二端连接并接地;所述处理器芯片的引脚r2和引脚r1连接有晶振y1,
所述晶振y1的引脚1与处理器芯片的引脚r2连接并连接有电容c15,所述电容c15的第二端与所述晶振y1的引脚4连接,所述晶振y1的引脚3连接有电容c19和电阻r27,所述电阻r27的另一端与所述处理器芯片的引脚r1连接,所述电容c19的另一端与晶振y1的引脚4相连并接地;如图10所示,所述处理器芯片与所述物联网模块连接,所述物联网模块包括物联网芯片u16,所述联网芯片u16的引脚1、引脚3、引脚31、引脚33和引脚36分别接地,所述联网芯片u16的引脚2连接有电阻r156,所述电阻r156的另一端连接有电阻r157和电容c162,所述电容c162的另一端接地,所述电阻r157的另一端连接有电容c163和电阻r158,所述电容c163的另一端接地,所述电阻r158的另一端连接有连接器j9,所述连接器j9的引脚1与所述电阻r158的另一端连接,所述连接器j9的引脚3、引脚4和引脚2连接并接地;所述联网芯片u16的引脚6连接有电阻r155且电阻r155的另一端接地;所述联网芯片u16的引脚9连接有电容c160并输入vcc-wifi,所述电容c160的另一端接地,所述联网芯片u16的引脚10和引脚11连接有晶振y3,所述晶振y3的引脚1连接有电阻r199和电容c240,所述电阻r199的另一端与所述联网芯片u16的引脚10连接,所述电容c240的另一端接地,所述晶振y3的引脚3连接有电容c241并与联网芯片u16的引脚11连接,所述电容c241的另一端接地,所述晶振y3的引脚2和引脚4相互连接并接地;所述联网芯片u16的引脚12连接有电阻r163,所述电阻r163的另一端与所述联网芯片u16的引脚20连接,所述联网芯片u16的引脚21连接有电感l8,所述电感l8的另一端与所述联网芯片u16的引脚23连接并连接有电容c165,所述电容c165的另一端接地;所述联网芯片u16的引脚22连接有电容c164并输入vccio-wifi,所述电容c164的另一端接地;所述联网芯片u16的引脚24连接有电阻r168和电阻r167,所述电阻r168的另一端输入vcc-wifi,所述电阻r167的另一端与所述处理器芯片的引脚u3连接;所述联网芯片u16的引脚29连接有电阻r166,所述电阻r166的另一端接地。
36.如图11所示,所述处理器芯片连接有按键模块,所述按键模块包括连接器j30、电阻r122和开关k1,所述电阻r122的第一端连接avcc,所述电阻r122的第二端与电容c140和双向瞬态抑制二极管d20连接,所述电容c140的另一端和所述双向瞬态抑制二极管d20的另一端连接并接地,所述双向瞬态抑制二极管d20的第一端与所述处理器芯片的引脚e11连接,所述连接器j30的引脚1连接有双向瞬态抑制二极管d24和电阻r154,所述电阻r154的另一端与所述连接器j30的引脚3连接并连接cir-rx,所述连接器j30的引脚2连接按键供电,所述连接器j30的引脚4连接处理器芯片的引脚b11,所述连接器j30的引脚5、引脚6和引脚7相互连接并接地,所述连接器j30的引脚1、引脚2、引脚3、引脚4和引脚5依次与测试点tp67、测试点tp66、测试点tp65、测试点tp64、测试点tp63和测试点tp62连接;所述开关k1的引脚1连接有双向瞬态抑制二极管esd14并与,所述双向瞬态抑制二极管esd14的另一端接地,所述处理器芯片的引脚b20连接,所述开关k1的引脚3和引脚4连接并接地;所述处理器芯片连接与所述内存模块连接,所述内存模块包括芯片ud1a和芯片ud1b,所述芯片ud1a和所述芯片ud1b与所述处理器芯片的引脚a11通信连接,所述芯片ud1a的引脚b3连接有电阻rd1,所述电阻rd1的另一端接地,所述芯片ud1a的引脚b4连接有电阻rd2,所述电阻rd2的另一端接地,所述芯片ud1b的引脚a3、引脚a4、引脚a5、引脚a6、引脚u3、引脚u4、引脚u5、引脚u6、引脚a10和引脚u10相连并与vdd18-lpddr连接,所述芯片ud1b的引脚b2、引脚b5、引脚c5、引脚e4、引脚e5、引脚f5、引脚h2、引脚j12、引脚k2、引脚l6、引脚m5、引脚n4、引脚n5、引脚r4、引脚r5、引脚t2、引脚t3、引脚t4、引脚t5、引脚b6、引脚b12、引脚c6、引脚d12、引脚e6、引脚f6、
引脚f12、引脚g6、引脚g9、引脚h10、引脚k10、引脚l9、引脚m6、引脚m12、引脚n6、引脚p12、引脚r6、引脚t6、引脚t12、引脚c3、引脚d4、引脚f4、引脚g3、引脚g4、引脚j4、引脚m4和引脚p3相连并接地,所述芯片ud1b的引脚d4、引脚d5、引脚d6、引脚g5、引脚h5、引脚h6、引脚j5、引脚j6、引脚k5、引脚k6、引脚l5、引脚p4、引脚p5、引脚p6、引脚a8、引脚a9、引脚h12、引脚k12、引脚u8、引脚u9、引脚a11、引脚c12、引脚e8、引脚e12、引脚g12、引脚h8、引脚h9、引脚h11、引脚j9、引脚j10、引脚k8、引脚k11、引脚l12、引脚n8、引脚n12、引脚r12、引脚u11、引脚f2、引脚g2、引脚h3、引脚l2和引脚m2相连并连接vcc-dram,且vcc-dram端上并联有电容cd1、电容cd2、电容cd3、电容cd4、电容cd5、电容cd6和电容cd7,所述电容cd1、电容cd2、电容cd3、电容cd4、电容cd5、电容cd6和电容cd7的另一端相互连接并接地;所述处理器芯片连接与所述lcd显示模块连接,如图12所示,所述lcd显示模块包括连接座lcd2、连接器j6和芯片u8,所述连接座lcd2的引脚2、引脚3相连并连接有电容c74,所述电容c74的第二端接地,所述电容c74的第一端与lcd-vcc-m连接,所述连接座lcd2的引脚4、引脚7、引脚10、引脚13、引脚16、引脚19、引脚22、引脚25和引脚30分别接地,所述连接座lcd2的引脚41和引脚42相连并接地,所述接座lcd2的引脚5、引脚6、引脚14、引脚15、引脚17、引脚18、引脚20、引脚21、引脚26、引脚27、引脚28、引脚29与屏幕2连接,所述屏幕2外设置有外壳1,所述接座lcd2的引脚31和引脚32相连并vled-,所述接座lcd2的引脚39和引脚40相连并vled+,所述芯片u8的管脚6连接有电感l2和电容c85并输入vcc-5vin-b,所述电容c85的另一端接地,所述电感l2的另一端连接有稳压二极管d19,所述稳压二极管d19的第二端与所述芯片u8的管脚5连接并连接有电容c86,所述电容c86的另一端接地,所述稳压二极管d19的两端上并联有稳压二极管d18,所述稳压二极管d19的第二端与芯片lcd3的引脚1连接并与vled+连接,所述芯片u8的管脚3连接有电阻r79和电阻r80,所述电阻r79和电阻r80的第二端相连并接地,所述电阻r79的第一端与芯片lcd3的引脚2连接并与vled-连接,所述芯片lcd3的引脚3和引脚4相连并接地,所述芯片u8的引脚2接地,所述芯片u8的引脚4与lcd-pwm连接,所述连接器j6的引脚1、引脚7和引脚8分别接地,所述连接器j6的引脚1、引脚2、引脚3、引脚4、引脚5、引脚6依次与测试点tp26、测试点tp27、测试点tp28、测试点tp29、测试点tp30、测试点tp31相连,所述连接器j6的引脚4连接有电容cl1并与vcc-ctp连接,电容cl1的另一端接地,所述连接器j6的引脚5连接有双向瞬态抑制二极管d9,所述连接器j6的引脚5连接有双向瞬态抑制二极管d7,所述双向瞬态抑制二极管d9和双向瞬态抑制二极管d7的第二端相连并接地。
37.所述储存模块与所述处理器芯片的存储管路模块连接,如图13所示,所述储存模块包括连接器j5,所述连接器j5的引脚1连接有双向瞬态抑制二极管dc1,所述连接器j5的引脚2连接有双向瞬态抑制二极管dc2,所述连接器j5的引脚3连接有双向瞬态抑制二极管dc3,所述连接器j5的引脚4连接有双向瞬态抑制二极管dc5和电容cc1,所述连接器j5的引脚5连接有双向瞬态抑制二极管dc6,所述连接器j5的引脚7连接有双向瞬态抑制二极管dc4,所述连接器j5的引脚8连接有双向瞬态抑制二极管dc7,所述连接器j5的引脚9连接有电阻rc2,所述电阻rc2的另一端连接有双向瞬态抑制二极管dc8,所述双向瞬态抑制二极管dc1的第二端、双向瞬态抑制二极管dc2的第二端、双向瞬态抑制二极管dc3的第二端、双向瞬态抑制二极管dc4的第二端、双向瞬态抑制二极管dc5的第二端、双向瞬态抑制二极管dc6的第二端、双向瞬态抑制二极管dc7的第二端、双向瞬态抑制二极管dc8的第二端、电容cc1的第二端与连接器j5的引脚6相连并与连接器j5的引脚10、引脚11、引脚12和引脚13连接;
如图18所示,所述高清录制模块包括连接器j23、芯片u24、芯片u25和芯片u26,所述连接器j23的引脚14和引脚15相连并接地,所述连接器j23的引脚6与测试点tp36连接,所述连接器j23的引脚8与测试点tp35连接,所述连接器j23的引脚10与测试点tp33连接,所述连接器j23的引脚11与测试点tp51连接,所述连接器j23的引脚12与测试点tp52连接,所述连接器j23的引脚4与测试点tp68和测试点tp73连接,所述连接器j23的引脚3与测试点tp74和测试点tp75连接,所述连接器j23的引脚2与测试点tp69和测试点tp71连接,所述连接器j23的引脚1与测试点tp70连接,所述芯片u24的引脚2与有极电容ce21的正极相连并与连接器j23的引脚4连接输入36v电压,所述芯片u26的引脚2与有极电容ce33的正极相连并与连接器j23的引脚4连接输入36v电压,所述有极电容ce21的负极和极电容ce33的负极分别接地,所述芯片u24的引脚4和引脚9相连并接地,所述芯片u24的引脚1与稳压二极管d32的负极和芯片u24的引脚3连接,所述稳压二极管d32的正极接地,所述稳压二极管d32的负极连接有电感lp14,所述电感lp14的第二端连接有电阻r1062、电容c328和电阻r185,所述电阻r1062的第一端与所述芯片u24的引脚5连接,所述电阻r1062的第二端与所述芯片u24的引脚6连接并接地,所述芯片u24的引脚6和电阻r1062的第二端上并联有电容c1088,所述电容c328的第二端与所述电阻r1062的第一端连接,所述电阻r185的第二端与所述芯片u24的引脚7相连并连接有电阻r193,所述电阻r193的另一端接地,所述电阻r185的第一端与有极电容ce29的正极连接,所述有极电容ce29的负极接地,所述有极电容ce29的正极连接acin接口,所述芯片u26的引脚4和引脚9相连并接地,所述芯片u26的引脚1与稳压二极管d34的负极连接,所述稳压二极管d34的正极接地,所述稳压二极管d34的负极与芯片u26的引脚3和电感lp16的第一端连接,所述电感lp16的第二端连接有电阻r1066、电感c1092和电阻r1067,所述电阻r1066的第一端与所述芯片u26的引脚5连接,所述电阻r1066的第二端与芯片u26的引脚6相连并接地,电容c1091并联在芯片u26的引脚6和电阻r1066的第二端上,所述电感c1092的第二端与所述芯片u26的引脚5连接并与电阻r1066的第一端连接,所述电阻r1067的第二端与芯片u26的引脚7相连并连接有电阻r1068,所述电阻r1068的另一端接地,所述电阻r1067的第一端与有极电容ce32的正极连接,所述有极电容ce32的负极接地,所述有极电容ce32的正极与连接器j23的引脚2相连并输入cam-12v;所述芯片u25的管脚2与有极电容c31的正极相连并与连接器j23的引脚4相连输入36v电压,所述有极电容c31的负极接地,所述芯片u25的管脚4和管脚9相连并接地,所述芯片u25的管脚1与稳压二极管d33的负极相连,所述稳压二极管d33的正极接地,所述稳压二极管d33的负极与芯片u25的管脚3相连并连接有电感lp15,所述电感lp15的第二端连接有电阻r1063、电容c1090和电阻r1064,所述电阻r1063的第一端与所述芯片u25的管脚5连接,所述电阻r1063的第二端与芯片u25的管脚6相连并接地,所述电容c1089并联在芯片u25的管脚6和电阻r1063的第二端上,所述电容c1090的第二端与电阻r1063的第一端相连,所述电阻r1064的第二端与所述芯片u25的管脚7相连并连接有电阻r1065,所述电阻r1065的第二端接地,所述电阻r1064的第一端与有极电容ce30的正极连接并与vcc-audi连接,所述有极电容ce30的负极接地。
38.如图15所示,所述主机系统还包括嵌入式多媒体控制器um1a和gps天线hp1,所述多媒体控制器um1a的引脚m6、引脚n5、引脚t10和引脚u9相连并连接有电容cm1和电容cm2,所述电容cm1和所述电容cm2的另一端相互连接并接地,所述电容cm1的第一端输入vcc-nand,所述多媒体控制器um1a的引脚k6、引脚w4、引脚y4、引脚aa3和引脚aa5相连并连接有
电容cm3和电容cm4,所述电容cm3和电容cm4的另一端相连并接地,所述多媒体控制器um1a的引脚m7、引脚p5、引脚r10、引脚u8、引脚k4、引脚y2、引脚y5、引脚aa4和引脚aa6相连并接地,所述多媒体控制器um1a的引脚t5连接有电阻rm2,所述多媒体控制器um1a的引脚h6连接有电阻rm3,所述电阻rm2和所述电阻rm3的另一端相连并接地,所述多媒体控制器um1a的引脚k2连接有电容cm6和电容cm5,所述电容cm6和电容cm5的另一端相连并接地,所述gps天线hp1的引脚1接地,所述gps天线hp1的引脚3连接有静电保护二极管esd2并连接uart3-rx,所述gps天线hp1的引脚4连接有静电保护二极管esd3并输入vcc-3v3,所述gps天线hp1的引脚2连接有静电保护二极管esd1并连接uart3-tx,所述静电保护二极管esd1、静电保护二极管esd2和静电保护二极管esd3的第二端相连并接地。
39.工作流程:安装时,将连接箱501安装到货车车体需要的位置,拧松摄像头4侧面的螺栓,调整摄像头4的俯仰角,然后拧紧螺栓,以固定摄像头4,并可根据需要,调整连接板503的重量,从而增加惯量的目的,提升在颠簸路段摄像头4稳定性,一个压缩组件的进口管515与清洗液储存罐连接,另一个压缩组件的进口管515与大气连通,并可在管口处设置空气过滤,从而保证抽入的气体洁净,将两个压缩组件的出口管517均与储能箱519连通;
40.当货车经过颠簸路段时,车体颠簸跳动,由摄像头4和连接板503存在惯量,使平行的铰接架502沿铰接点运动,同时带动连接杆506同步运动,由于连接箱501与车体固定,摄像头4与车体相对运动,使摆杆端部的齿扇509带动齿轮510转动,齿轮510同步驱动曲轴511转动,曲轴511驱动两个压缩组件运动,由于两个压缩组件工作原理相同,仅压入介质不同,此处以压入液体为例进行说明,曲轴511转动后,带动曲轴连杆512运动,并带动第一活塞514上下往复运动,第一活塞514向上运动时,其内部空间压力减小,进口单向阀516开启,出口单向阀518关闭,将清洗液储存罐内的清洗液通过进口管515抽入内部空间,当第一活塞514向下运动时,其内部空间压力增大,进口单向阀516关闭,出口单向阀518开启,将液体通过出口管517压入储能箱519内,另一个压缩组件以同样的原理将空气压入储能箱519内,气液配合,气体的压缩率高,而液体的压缩率小,以气体推动液体喷出,能够保持液体喷出状态,并最大程度实现液体全部喷出;
41.随着不断的储压,储能箱519内压力不断升高,当上升至预定值时,如图8所示,带有压力的液体通过第二活塞524靠近连接管520侧的流体通道顶动第二活塞524,第二活塞524克服弹簧523的推力运动,带动卡杆525收缩,密封板526的失去固定并沿其铰接端转动打开,此时液体通过连接管520喷出,流动至小型水轮机529的进口端,推动小型水轮机529转动,随后液体从小型水轮机529的出口端流出,并通过喷头喷向摄像头4的表面,当液体将近流尽时,气体会混合液体,在喷头处成雾状喷出,最后喷出气体,实现多重清理,提高清洗效果,压力完全释放后,密封板526在弹性拉带527和重力的共同作用下关闭,并接触卡杆525时,由于卡杆525的端面为倾斜面,卡杆525的倾斜面收到挤压后向内收缩,带动第二活塞524顶动弹簧523,密封板526复位后,弹簧523顶动第二活塞524和卡杆525,使卡杆525伸出对密封板526重新固定;
42.如图9所示,小型水轮机529转动的同时,带动定位轮531和刮板530同步转动,定位轮531上圆弧凸起的最高点与刮板530的位置相对,刮板530贴合在摄像头的表面,配合清洗液,进行刮动清理,定位轮531转动时,弹簧伸缩杆532和滚轮533抵顶在定位轮531的表面,当液体压力逐渐耗尽时,小型水轮机529的驱动力越来越弱,难以驱动定位轮531的圆弧凸
起最高点越过滚轮533,小型水轮机529停止动作后,弹簧伸缩杆532推动滚轮533下压,给圆弧凸起的侧面施加压力,促使其转动,直至滚轮533位于两个圆弧凸起之间,带动刮板530转动,防止刮板530挡住摄像头4。
43.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本专利申请权利要求的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1