车辆接近告知装置及包括所述装置的拣货堆高机的制作方法
1.本发明涉及一种车辆接近告知装置及包括所述装置的拣货堆高机(picking truck),所述车辆接近告知装置通过朝向车辆后方的路面照射光,从而将车辆的接近告知给位于周边的人及在周边行驶的其他车辆。
背景技术:
2.以往,已知有一种工业车辆,为了将车辆的接近告知给位于所述车辆周边的人,而朝向车辆后方的路面照射告知光(例如,参照专利文献1)。另外,在被称作拣货堆高机的工业车辆中,也有以可照射告知光的方式构成者。
3.图11表示像这样构成的拣货堆高机100。如本图所示,拣货堆高机100包括:车辆本体11,具有行驶装置;门架(mast)13,设在车辆本体11的后方;驾驶台14,能够沿着门架13升降;左右一对叉(fork)17、17,与驾驶台14一同升降;以及照明部102,经由适当的支架101而设于驾驶台14的头部护罩(head guard)18。照明部102朝向车辆后方的路面f照射告知光l,使路面f上显现标记m。
4.[现有技术文献]
[0005]
[专利文献]
[0006]
[专利文献1]日本专利特开2014-141329号公报
技术实现要素:
[0007]
[发明所要解决的问题]
[0008]
然而,由所述以往的拣货堆高机100进行的告知对于在相同的作业区域内作业(行驶)的其他拣货堆高机而言不充分。这是因为,拣货堆高机彼此的接近速度较拣货堆高机与人的接近速度而言更快,即便其他拣货堆高机的搭乘者注意到标记m并进行用于躲避碰撞的操作,有时也来不及躲避。
[0009]
若在远离车辆的位置显现标记m,则所述问题可能会消除。然而,若采取此种对策,则会产生标记m也停留在远离车辆的人的眼中而此人感到麻烦这一其他问题。
[0010]
本发明是鉴于所述情况而完成,其课题在于提供一种能够有效果地将车辆接近告知给位于周边的人及在周边行驶的其他车辆的车辆接近告知装置、及包括所述装置的拣货堆高机。
[0011]
[解决问题的技术手段]
[0012]
为了解决所述课题,本发明的车辆接近告知装置是设于在规定的作业区域内行驶的多个车辆的各个车辆上的装置,所述车辆接近告知装置包括:照明部,被设置在车辆的能够升降的驾驶台,且朝向车辆后方的路面照射告知光;照射方向变更部,通过使照明部相对于驾驶台的设置角度发生变化,从而变更照射方向;以及控制部,基于与本车辆相关的本车辆信息和与其他车辆相关的其他车辆信息来使提供给照射方向变更部的与设置角度相关的指令发生变化,本车辆信息包含作业区域中的本车辆的当前位置,其他车辆信息包含作
业区域中的其他车辆的当前位置、其他车辆的轮胎角度、及其他车辆的速度,控制部在以下情况下使提供给照射方向变更部的指令发生变化,即:(1)其他车辆的当前位置位于设定在本车辆的后方的规定的监视区域内,(2)根据其他车辆的当前位置、轮胎角度及速度预测的经过规定时间后的其他车辆的预测位置位于经过所述规定时间后的监视区域内,且(3)所述其他车辆的预测位置较所述其他车辆的当前位置而言更靠近所述本车辆的预测位置。
[0013]
所述本车辆信息还包含所述本车辆的轮胎角度与所述本车辆的速度,经过所述规定时间后的所述监视区域是根据所述本车辆的当前位置、轮胎角度及速度预测的经过所述规定时间后的监视区域,本车辆的预测位置是根据所述本车辆的当前位置、轮胎角度及速度预测的经过所述规定时间后的所述本车辆的位置。
[0014]
所述其他车辆的预测位置较所述其他车辆的当前位置而言更靠近所述本车辆的预测位置的情况包括所述本车辆的当前位置与所述其他车辆的当前位置之间的距离较所述本车辆的预测位置与所述其他车辆的预测位置之间的距离而言更长的情况。
[0015]
所述车辆接近告知装置的控制部也可具有以下结构:在满足所述(1)、(2)及(3)的情况下,将使所照射的路面的位置远离本车辆的那样的指令提供给照射方向变更部。
[0016]
所述车辆接近告知装置的控制部也可具有以下结构:自存储与多个车辆的各个车辆相关的车辆信息的管理装置获取与其他车辆相关的车辆信息作为其他车辆信息。
[0017]
所述车辆接近告知装置的本车辆信息也可还包含驾驶台的升降位置,在所述情况下,控制部优选为向照射方向变更部提供指令,以使得即便升降位置发生变化,所照射的路面的位置也不会发生变化。
[0018]
所述车辆接近告知装置的监视区域优选为具有随着远离本车辆的后方而车宽方向上的尺寸变大的大致三边形形状或大致扇状的形状。
[0019]
另外,为了解决所述课题,本发明的拣货堆高机包括所述车辆接近告知装置。
[0020]
[发明的效果]
[0021]
根据本发明,可提供一种能够有效果地将车辆接近告知给位于周边的人及在周边行驶的其他车辆的车辆接近告知装置、及包括所述装置的拣货堆高机。
附图说明
[0022]
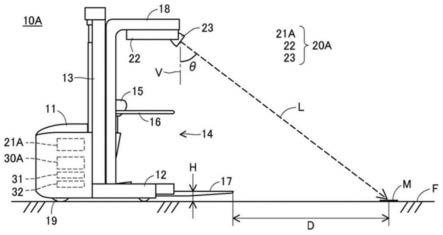
图1是表示本发明的第一实施例的拣货堆高机的示意侧面图。
[0023]
图2是表示第一实施例的车辆接近告知装置及拣货堆高机的结构的框图。
[0024]
图3(a)是表示本车辆10a-1的当前位置p1及预测位置p1a、其他车辆10a-2的当前位置p2及预测位置p2a、预测位置p2b、预测位置p2c、当前的监视区域40、经过规定时间后的监视区域40a的关系的平面图。
[0025]
图3(b)是图3(a)的变形例,是表示在本车辆不动、或者暂时不动的情况下,本车辆10a-1的当前位置p1、其他车辆10a-2的当前位置p2及预测位置p2a、预测位置p2b、预测位置p2c、监视区域40的关系的平面图。
[0026]
图4的(a)是表示第一实施例中的满足/不满足规定的三个条件与照射方向θ的关系的图表,图4的(b)是表示第一实施例中的满足/不满足规定的三个条件与照射距离d的关系的图表。
[0027]
图5是表示第一实施例的车辆接近告知装置的具体的结构的图。
[0028]
图6是表示本发明的第二实施例的拣货堆高机的示意侧面图。
[0029]
图7是表示第二实施例的车辆接近告知装置及拣货堆高机的结构的框图。
[0030]
图8的(a)是表示第二实施例的不满足规定的三个条件时的升降位置h与照射方向θ的关系的图表,图8的(b)是表示第二实施例的不满足规定的三个条件时的升降位置h与照射距离d的关系的图表,图8的(c)是表示第二实施例的满足规定的三个条件时的升降位置h与照射方向θ的关系的图表,图8的(d)是表示第二实施例的满足规定的三个条件时的升降位置h与照射距离d的关系的图表。
[0031]
图9的(a)是表示第二实施例的低提升高度时的拣货堆高机的示意侧面图,图9的(b)是表示第二实施例的高提升高度时的拣货堆高机的示意侧面图。
[0032]
图10是表示监视区域的变形例的平面图。
[0033]
图11是表示以往的拣货堆高机的示意侧面图。
[0034]
[符号的说明]
[0035]
10a、10b:拣货堆高机
[0036]
10a-1、10b-1:拣货堆高机(本车辆)
[0037]
10a-2、10b-2:拣货堆高机(其他车辆)
[0038]
11:车辆本体
[0039]
12:腿
[0040]
13:门架
[0041]
14:驾驶台
[0042]
15:操作盘
[0043]
16:滚落护罩
[0044]
17:叉
[0045]
18:头部护罩
[0046]
19:轮胎
[0047]
20a、20b:车辆接近告知装置
[0048]
21a、21b:控制部
[0049]
22:照射方向变更部
[0050]
23:照明部
[0051]
24:照射方向检测部
[0052]
25:动力缸
[0053]
26:第一连杆构件
[0054]
27:第二连杆构件
[0055]
28:第三连杆构件
[0056]
29:支撑构件
[0057]
30a、30b:主控制部
[0058]
31:车速检测部
[0059]
32:轮胎角度检测部
[0060]
33:升降位置检测部
[0061]
40:监视区域
[0062]
50:管理装置
具体实施方式
[0063]
以下,参照附图,说明本发明的拣货堆高机及车辆接近告知装置的实施例。
[0064]
[第一实施例]
[0065]
图1表示本发明的第一实施例的拣货堆高机10a。拣货堆高机10a是在规定的作业区域内与其他的拣货堆高机10a一同作业(行驶)的车辆,如本图所示,包括:车辆本体11,具有行驶装置;左右一对腿12、12及门架13,被设在车辆本体11的后方;以及驾驶台14,能够沿着门架13升降。行驶装置包括兼作驱动轮与转向轮的轮胎19。
[0066]
驾驶台14具有:操作盘15,包含由搭乘者操作的各种控制杆(lever)等;滚落护罩16,用于防止搭乘者滚落;左右一对叉17、17,朝向后方延伸;以及头部护罩18,覆盖搭乘者的头顶。叉17、叉17被设在驾驶台14的地板上。
[0067]
本实施例的拣货堆高机10a还包括:构成车辆接近告知装置20a的控制部21a、照射方向变更部22及照明部23、主控制部30a、车速检测部31、以及轮胎角度检测部32。照射方向变更部22包括图1中未图示的照射方向检测部24。
[0068]
照明部23包含朝向车辆后方的路面f照射告知光l的发光二极管(light emitting diode,led)灯。显现在路面f的告知光l的像(以下,称为“标记”)m既可为轮廓模糊的圆状,也可通过设在照明部23的透镜或狭缝的作用而成为轮廓清晰的点状、线状或箭头状。另外,为了提高告知效果,优选为告知光l(标记m)的颜色为相对于路面f而显眼的颜色。在本实施例中,标记m具有沿车宽方向延伸的蓝色的线状。
[0069]
照射方向变更部22通过基于来自控制部21a的指令来改变照明部23相对于驾驶台14(本实施例中为头部护罩18)的设置角度,从而变更照射方向(本实施例中为将铅垂线v作为基准的方向θ)。
[0070]
控制部21a根据是否存在满足后述的全部三个条件的其他车辆,使提供给照射方向变更部22的指令发生变化。此时,控制部21a参照直接或间接地检测照射方向θ的照射方向检测部24的检测结果。
[0071]
如图2所示,本实施例的拣货堆高机10a(10a-1、10a-2
···
)与管理装置50进行无线通信。
[0072]
更详细而言,拣货堆高机10a-1的主控制部30a通过无线通信将本车辆信息发送给管理装置50并使管理装置50存储本车辆信息,所述本车辆信息包含由车速检测部31检测出的车速、由轮胎角度检测部32检测出的轮胎19的角度(以下,称为“轮胎角度”)、以及由这些并通过运算求出的作业区域内的当前位置。此时,主控制部30a也将本车辆信息发送给控制部21a。
[0073]
其他的拣货堆高机10a-2
···
也将本车辆信息发送给管理装置50并使管理装置50存储本车辆信息。其结果,在管理装置50中汇集有在作业区域内作业的全部拣货堆高机10a-1、10a-2
···
的本车辆信息。再者,存储在管理装置50中的拣货堆高机10a-2的本车辆信息是对于拣货堆高机10a-1而言的其他车辆信息。
[0074]
拣货堆高机10a-1的主控制部30a通过无线通信接收存储在管理装置50中的其他车辆信息(即,拣货堆高机10a-2
···
的本车辆信息),并发送给控制部21a。其他的拣货堆
高机10a-2
···
的主控制部30a也自管理装置50接收其他车辆信息并发送给控制部21a。
[0075]
如此,各拣货堆高机10a所包括的车辆接近告知装置20a的控制部21a获取包含本车辆的当前位置、车速及轮胎角度的本车辆信息、以及包含其他车辆的当前位置、车速及轮胎角度的其他车辆信息。然后,控制部21a基于所获取的本车辆信息及其他车辆信息,使提供给照射方向变更部22的指令发生变化,从而变更照射方向θ及照射距离d。在本车辆不动、或者暂时不动的情况下,也可没有本车辆的车速及轮胎角度等信息。
[0076]
参照图3(a)及图4,详细说明由控制部21a进行的照射方向θ及照射距离d的变更。
[0077]
拣货堆高机10a-1(以下,设为“本车辆”)的控制部21a当获取本车辆信息及其他车辆信息时,进行如下第一判定,即:基于本车辆信息中包含的本车辆的当前位置p1与其他车辆信息中包含的其他拣货堆高机10a-2(以下,设为“其他车辆”)的当前位置p2,判定其他车辆10a-2的当前位置p2是否位于设定在本车辆10a-1的后方的规定的监视区域40内。在图3(a)所示的例子中,判定为其他车辆10a-2的当前位置p2位于监视区域40内。
[0078]
监视区域40具有随着远离本车辆10a-1的后方而车宽方向上的尺寸变大的大致扇状。
[0079]
在第一判定之后,本车辆10a-1的控制部21a进行如下第二判定,即:判定根据其他车辆信息中包含的其他车辆10a-2的当前位置p2、车速及轮胎角度预测的经过规定时间后(本实施例中为2秒后)的预测位置是否位于根据本车辆信息中包含的本车辆10a-1的当前位置p1、车速及轮胎角度预测的经过规定时间后(本实施例中为2秒后)的监视区域40a内。在预测位置为p2a的情况下,判定为位于监视区域40a内。在预测位置为p2b的情况下,也判定为位于监视区域40a内。另一方面,在预测位置为p2c的情况下,判定为不在监视区域40a内。
[0080]
在第二判定之后,本车辆10a-1的控制部21a进行如下第三判定,即:基于本车辆10a-1的当前位置p1、其他车辆10a-2的当前位置p2、根据本车辆10a-1的当前位置p1、车速及轮胎角度预测的经过规定时间后(本实施例中为2秒后)的预测位置p1a、以及在第二判定时预测的其他车辆10a-2的预测位置,判定当前位置p1与当前位置p2之间的距离pd是否较本车辆10a-1的预测位置p1a与其他车辆10a-2的预测位置之间的距离pd'而言更长。即,第三判定是判定其他车辆10a-2的预测位置较其他车辆10a-2的当前位置而言是不是更靠近所述本车辆10a-1的预测位置。在预测位置为p2b的情况下,判定为距离pd较距离pd'而言更长。在预测位置为p2c的情况下,也判定为距离pd较距离pd'而言更长。另一方面,在预测位置为p2a的情况下,判定为距离pd等于距离pd'。
[0081]
在本车辆10a-1不动、或者暂时不动的情况下,也可没有本车辆10a-1的车速及轮胎角度等信息。也可判定其他车辆10a-2的预测位置较其他车辆10a-2的当前位置而言是不是更靠近所述本车辆10a-1的当前位置。
[0082]
本车辆10a-1的控制部21a对在作业区域内作业的全部其他车辆进行同样的判定。
[0083]
关于在第一判定中判定为当前位置位于监视区域40内、在第二判定中判定为预测位置位于监视区域40a内、且在第三判定中判定为距离pd较距离pd'而言更长的其他车辆、换言之满足规定的三个条件的其他车辆,若保持原样并经过时间,则有可能与本车辆10a-1的后方碰撞。因此,在存在此种其他车辆的情况下,本车辆10a-1的控制部21a使提供给照射方向变更部22的指令发生变化而将照射方向θ自θ1变更为θ2(参照图4的(a))。由此,照射距
离d自d1变化为d2(参照图4的(b)),标记m的位置自m1变化为m2(参照图3(a))。即,标记m远离本车辆。其结果,有可能与本车辆10a-1碰撞的其他车辆的搭乘者可迅速注意到本车辆10a-1的存在。
[0084]
[变形例]
[0085]
在本车辆10a-1不动、或者暂时不动的情况下,也可没有本车辆10a-1的车速及轮胎角度等信息。此时,可将图3(a)简化为图3(b)。可使所述第二判定与第三判定如以下那样发生变化。
[0086]
作为第二判定的变形例,在本车辆10a-1不动、或者暂时不动的情况下,如图3(b)那样,在第一判定之后,本车辆10a-1的控制部21a进行如下第二判定,即:判定根据其他车辆信息中包含的其他车辆10a-2的当前位置p2、车速及轮胎角度预测的经过规定时间后(本实施例中为2秒后)的预测位置是否位于监视区域40内。在预测位置为p2a的情况下,判定为位于监视区域40内。在预测位置为p2b的情况下,也判定为位于监视区域40内。另一方面,在预测位置为p2c的情况下,判定为不在监视区域40内。
[0087]
作为第三判定的变形例,在第二判定之后,本车辆10a-1的控制部21a进行如下第三判定,即:基于本车辆10a-1的当前位置p1、其他车辆10a-2的当前位置p2、以及在第二判定时预测的其他车辆10a-2的预测位置,判定预测位置较当前位置p2而言是否更靠近当前位置p1。在预测位置为p2b的情况下,判定为较当前位置p2而言更靠近当前位置p1。在预测位置为p2c的情况下,也判定为较当前位置p2而言更靠近当前位置p1。另一方面,在预测位置为p2a的情况下,判定为较当前位置p2而言更远离当前位置p1。
[0088]
关于在第一判定中判定为当前位置位于监视区域40内、在第二判定中判定为预测位置位于监视区域40内、且在第三判定中判定为预测位置较当前位置而言更靠近本车辆的当前位置的其他车辆、换言之满足规定的三个条件的其他车辆,若保持原样并经过时间,则有可能与本车辆10a-1的后方碰撞。因此,在存在此种其他车辆的情况下,本车辆10a-1的控制部21a使提供给照射方向变更部22的指令发生变化而将照射方向θ自θ1变更为θ2(参照图4的(a))。由此,照射距离d自d1变化为d2(参照图4的(b)),标记m的位置自m1变化为m2(参照图3(b))。即,标记m远离本车辆。其结果,有可能与本车辆10a-1碰撞的其他车辆的搭乘者可迅速注意到本车辆10a-1的存在。另一方面,在不存在满足规定的三个条件的其他车辆的情况下,本车辆10a-1的控制部21a不使提供给照射方向变更部22的指令发生变化,并将照射方向θ维持为θ1。
[0089]
在本实施例中,在控制部21a的控制下使照射方向θ发生变化的照射方向变更部22具有以下所示的结构。
[0090]
即,如图5所示,照射方向变更部22包含:动力缸(power cylinder)25,被设在头部护罩18的下表面;连杆机构,包含三个连杆构件26、27、28;支撑构件29,悬吊在头部护罩18的下表面;以及照射方向检测部24。
[0091]
动力缸25包含根据来自控制部21a的指令而旋转的马达。动力缸25在马达根据指令而旋转时,沿着拣货堆高机10a的前后方向伸缩与马达的旋转量相应的量。再者,指令包含关于旋转方向的指令与关于旋转速度的指令。
[0092]
第一连杆构件26的一端部能够转动地连结于动力缸25的前端部,并且另一端部能够转动地连结于支撑构件29的前侧连结部29a。第二连杆构件27的一端部能够转动地连结
于第一连杆构件26的中间部,并且另一端部能够转动地连结于第三连杆构件28的前侧上端部。第三连杆构件28的前侧下端部能够转动地连结于支撑构件29的后侧连结部29b。并且,照明部23被固定在第三连杆构件28的后端部。
[0093]
照射方向检测部24包含被设在支撑构件29的后侧连结部29b的电位计。照射方向检测部24对以后侧连结部29b为基准的第三连杆构件28的位置进行检测,并且朝向控制部21a输出与检测结果相关的信号。所述信号可以说对应于照射方向θ。
[0094]
当动力缸25根据来自控制部21a的指令而伸缩时,连杆机构26、27、28工作而照明部23相对于头部护罩18的设置角度发生变化,其结果,照射方向θ发生变化。再者,图5的(b)表示动力缸25较图5的(a)而言伸长,照射方向θ变小的状态。
[0095]
[第二实施例]
[0096]
图6表示本发明的第二实施例的拣货堆高机10b。拣货堆高机10b与拣货堆高机10a不同的方面在于:包括车辆接近告知装置20b来代替车辆接近告知装置20a、包括主控制部30b来代替主控制部30a、还包括升降位置检测部33,但在其他方面与拣货堆高机10a共通。另外,车辆接近告知装置20b在包括控制部21b来代替控制部21a的方面与车辆接近告知装置20a不同,但在其他方面与车辆接近告知装置20a共通。
[0097]
如图7所示,本实施例的拣货堆高机10b(10b-1、10b-2
···
)与管理装置50进行无线通信。
[0098]
更详细而言,拣货堆高机10b-1的主控制部30b通过无线通信将本车辆信息发送给管理装置50并使管理装置50存储本车辆信息,所述本车辆信息包含由车速检测部31检测出的车速、由轮胎角度检测部32检测出的轮胎角度、由这些并通过运算求出的作业区域内的当前位置、以及由升降位置检测部33检测出的驾驶台14的升降位置h。此时,主控制部30b也将本车辆信息发送给控制部21b。
[0099]
其他的拣货堆高机10b-2
···
也将本车辆信息发送给管理装置50并使管理装置50存储本车辆信息。其结果,在管理装置50中汇集有在作业区域内作业的全部拣货堆高机10b-1、10b-2
···
的本车辆信息。再者,存储在管理装置50中的拣货堆高机10b-2的本车辆信息是对于拣货堆高机10b-1而言的其他车辆信息。
[0100]
拣货堆高机10b-1的主控制部30b通过无线通信接收存储在管理装置50中的其他车辆信息(即,拣货堆高机10b-2
···
的本车辆信息),并发送给控制部21b。其他的拣货堆高机10b-2
···
的主控制部30b也自管理装置50接收其他车辆信息并发送给控制部21b。
[0101]
如此,各拣货堆高机10b所包括的车辆接近告知装置20b的控制部21b获取包含本车辆的当前位置、车速、轮胎角度及升降位置h的本车辆信息、以及包含其他车辆的当前位置、车速及轮胎角度的其他车辆信息。然后,控制部21b基于所获取的本车辆信息及其他车辆信息,使提供给照射方向变更部22的指令发生变化,从而变更照射方向θ及照射距离d。即,在存在满足所述规定的三个条件的其他车辆的情况下,控制部21b使提供给照射方向变更部22的指令发生变化而使标记m远离本车辆。在本车辆不动、或者暂时不动的情况下,也可没有本车辆的车速及轮胎角度等信息。
[0102]
与此同时,控制部21b也根据所获取的本车辆信息中包含的驾驶台14的升降位置h来使提供给照射方向变更部22的指令发生变化。
[0103]
例如,在不存在满足所述规定的三个条件的其他车辆的情况下,当本车辆的驾驶
台14的升降位置h自h1变化为h3(其中,h3>h1)时,控制部21b通过使照射方向θ降低至与h3对应的θ3来将照射距离d维持为d1(参照图8的(a)、图8的(b)及图9)。另外,在不存在满足所述规定的三个条件的其他车辆的情况下,当升降位置h自h2变化为h3(其中,h2>h3)时,控制部21b通过使照射方向θ增加至θ3来将照射距离d维持为d1(参照图8的(a)、图8的(b)及图9)。
[0104]
同样地,在存在满足所述规定的三个条件的其他车辆的情况下,当升降位置h自h1变化为h3(其中,h3>h1)时,控制部21b通过使照射方向θ降低至与h3对应的θ3'来将照射距离d维持为d2(参照图8的(c)、图8的(d))。另外,在存在满足所述规定的三个条件的其他车辆的情况下,当升降位置h自h2变化为h3(其中,h2>h3)时,控制部21b通过使照射方向θ增加至θ3'来将照射距离d维持为d2(参照图8的(c)、图8的(d))。
[0105]
控制部21b始终进行将照射距离d维持为d1或d2的控制。
[0106]
如此,在本发明的第一实施例、第二实施例的拣货堆高机10a、拣货堆高机10b及车辆接近告知装置20a、车辆接近告知装置20b中,只在存在自后方逐渐接近的其他车辆的情况下,由告知光l形成的标记m远离车辆。因此,根据本发明的第一实施例、第二实施例,可将远离车辆的人感到麻烦的情况抑制到最小限度,同时使存在碰撞的可能性的其他车辆的搭乘者迅速注意到本车辆的存在。
[0107]
另外,在本发明的第二实施例的拣货堆高机10b及车辆接近告知装置20b中,即便升降位置h发生变化,照射距离d也不会发生变化。因此,根据本发明的第二实施例,也可防止在高提升高度时标记m变淡而可视性降低的情况。
[0108]
[变形例]
[0109]
以上,对本发明的拣货堆高机及车辆接近告知装置的第一实施例、第二实施例进行了说明,但本发明的结构并不限定于这些。
[0110]
例如,监视区域40可为图10的(a)~图10的(c)所示的形状。其中,为了高精度地发现逐渐接近本车辆的其他车辆,监视区域40的形状优选为随着远离车辆的后方而车宽方向上的尺寸变大。即,作为监视区域40的形状,优选为图3(a)、图3(b)所示的大致扇状、图10的(a)所示的大致三边形形状、及图10的(b)所示的形状。
[0111]
另外,构成车辆接近告知装置20a、车辆接近告知装置20b的照射方向变更部22及照明部23也可设在驾驶台14的头部护罩18以外的部分。
[0112]
另外,构成车辆接近告知装置20a、车辆接近告知装置20b的控制部21a、控制部21b也可设在驾驶台14侧而不设在车辆本体11上。
[0113]
另外,控制部21a、控制部21b也可自管理装置50直接获取其他车辆信息而不自主控制部30a、主控制部30b获取。
[0114]
另外,只要主控制部30a发送给控制部21a的本车辆信息中至少包含本车辆的当前位置、车速及轮胎角度即可,只要主控制部30b发送给控制部21b的本车辆信息中至少包含本车辆的当前位置、车速、轮胎角度及升降位置h即可。在本车辆不动、或者暂时不动的情况下,也可没有本车辆的车速及轮胎角度等信息。
[0115]
另外,只要主控制部30a、主控制部30b发送给管理装置50的本车辆信息中至少包含本车辆的当前位置、车速及轮胎角度即可。
[0116]
另外,只要控制部21a、控制部21b所获取的其他车辆信息中至少包含其他车辆的
当前位置、车速及轮胎角度即可。如所述那样,控制部21a、控制部21b可经由主控制部30a、主控制部30b获取其他车辆信息,也可自管理装置50直接获取其他车辆信息。
[0117]
另外,控制部21a、控制部21b也可自管理装置50获取本车辆信息而不自主控制部30a、主控制部30b获取。
[0118]
另外,第一实施例、第二实施例中的规定时间“2秒”只是一例,可适宜变更。
[0119]
另外,本发明的车辆接近告知装置也可配置于具有能够升降的驾驶台的拣货堆高机以外的车辆上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1