一种车辆行驶稳定性智能控制装置、方法和汽车与流程
1.本发明属于底盘控制技术领域,更具体地,涉及一种车辆行驶稳定性智能控制装置、方法和汽车。
背景技术:
2.传统乘用车大多采用前轮驱动前轮转向,前悬架多采用麦弗逊或双横臂(含双轴销双横臂)结构,由于布置空间限制和动态性能要求,上下控制臂球铰中心连线形成的虚拟主销线(steering aixs inclination))不通过轮心(wheel center),主销线与轮心距离称为轮心偏置(spindle length),主销与接地点距离称为主销偏距(scrub radias)(见图三、图四),此两个距离在纵向力(驱动力和制动力等)作用下,形成了前轮转向力矩,若左右纵向力不平衡,直接导致前轮行驶跑偏。
技术实现要素:
3.本发明的目的是针对现有技术中存在的不足,提供一种车辆行驶稳定性智能控制方法,该控制装置,通过加装在减振器上端的前轮转角传感器获取前轮转角和方向盘转角传感器方向盘转角进行比较,若存在偏差,再比较装在传动轴球笼上力矩传感器获取左右半轴力矩差,系统判断是否存在扭矩跑偏,结合辅助轮速传感器、车身横摆传感器、通过控制系统采用相应策略保证车辆行驶稳定性和安全性。
4.为了实现上述目的,本发明提供一种车辆行驶稳定性智能控制装置,该装置包括:
5.前轮转角传感器,所述前轮转角传感器设置在前减振器上端;
6.左扭矩传感器和右扭矩传感器,所述左扭矩传感器和所述右扭矩传感器分别设置在左传动轴球笼上和右传动轴球笼上;
7.所述前轮转角传感器、所述左扭矩传感器和所述右扭矩传感器与汽车的eps转向助力系统和esp制动控制系统连接。
8.一种汽车,包括:上述的车辆行驶稳定性智能控制装置,所述车辆行驶稳定性智能控制装置与车载主机连接。
9.一种车辆行驶稳定性智能控制方法,利用上述的车辆行驶稳定性智能控制装置,该方法包括:
10.利用前轮转角传感器获得前轮转角;
11.利用左扭矩传感器和右扭矩传感器获得左前轮扭矩和右前轮扭矩;
12.利用所述前轮转角、所述左前轮扭矩和所述右前轮扭矩结合方向盘转角控制车轮扭矩转向;
13.根据侧向加速度和横摆角速度控制车轮扭矩转向。
14.可选地,在利用前轮转角传感器检测前轮转角之前,使所述车辆正常直行;
15.方向盘转角不为0时,根据前轮转角和方向盘转角的差值,控制动力系统调整车轮扭矩进行转弯。
16.可选地,所述利用所述前轮转角、所述左前轮扭矩和所述右前轮扭矩结合方向盘转角控制车轮扭矩转向包括:
17.若方向盘转角为0,前轮转角为0或小于设定阀值,左前轮扭矩和右前轮扭矩的差值为0或小于设定阀值,保持直行;
18.若方向盘转角为0,前轮转角不为0或大于设定阀值,左前轮扭矩和右前轮扭矩的差值不为0或大于设定阀值,控制动力系统调整车轮扭矩,消除跑偏。
19.可选地,所述根据侧向加速度和横摆角速度控制车轮扭矩转向包括:
20.若前轮转角为0,且y向加速度为0或小于设定阀值,保持直行;
21.若前轮转角为0,y向加速度传感器不为0或大于设定阀值,调节转向系统保持直行。
22.可选地,所述根据侧向加速度和横摆角速度控制车轮扭矩转向还包括:
23.若方向盘转角为0,横摆角速度为0或小于设定阀值,保持直行。
24.若方向盘转角不为0,横摆角速度不为0或大于设定阀值,调节制动控制系统保持直行。
25.可选地,若方向盘转角为0,前轮转角不为0或大于设定阀值,左前轮扭矩和右前轮扭矩的差值不为0或大于设定阀值,控制动力系统调整车轮扭矩不能消除跑偏,则esp制动控制系统控制停车。
26.可选地,所述控制车轮扭矩转向包括反向扭矩和降低扭矩。
27.可选地,还包括监控车速,根据车速控制转向时两个前轮的转速。
28.本发明提供一种车辆行驶稳定性智能控制方法,其有益效果在于:
29.1、该控制装置,通过加装在减振器上端的前轮转角传感器获取前轮转角和方向盘转角传感器方向盘转角进行比较,若存在偏差,再比较装在传动轴球笼上力矩传感器获取左右半轴力矩差,系统判断是否存在扭矩跑偏,结合辅助轮速传感器、车身横摆传感器、通过控制系统采用相应策略保证车辆行驶稳定性和安全性。
30.2、前轮转角与方向盘转角几何关系一一对应,通过前轮转角与方向盘转角比较,进行转向系统间隙检测和补偿、提高转向系统灵敏度。
31.3、前轮转角传感器与方向盘转角传感器形成转向转角冗余,满足了l4级自动驾驶转向安全双冗余要求。
32.4、适应解决近几年新能源车及混合动力车型,其大扭矩输出易出现扭矩转向,有效提升车辆行驶稳定性和安全性,增加驾驶安全感和舒适性,便于完善后续自动驾驶功能。
33.本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
34.通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
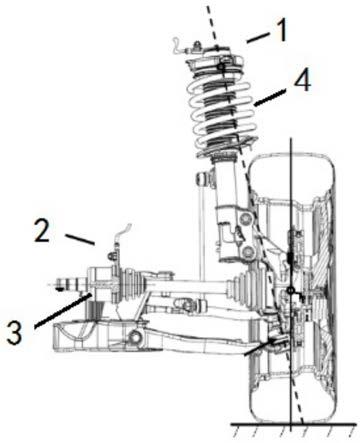
35.图1示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的结构示意图。
36.图2示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的原理
图。
37.图3示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的图2的侧视图。
38.图4示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制方法的流程图。
39.图5示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制方法的原理图。
40.附图标记说明:
41.1、前轮转角传感器;2、右扭矩传感器;3、右传动轴球笼;4、前减振器。
具体实施方式
42.下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
43.图1示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的结构示意图;图2示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的原理图;图3示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制装置的图2的侧视图。
44.如图1-3所示,一种车辆行驶稳定性智能控制装置,该装置包括:
45.前轮转角传感器1,前轮转角传感器1设置在前减振器4上端;
46.左扭矩传感器和右扭矩传感器2,左扭矩传感器和右扭矩传感器2分别设置在左传动轴球笼上和右传动轴球笼3上;
47.前轮转角传感器1和左扭矩传感器和右扭矩传感器2与汽车的eps转向助力系统和esp制动控制系统连接。
48.一种汽车,包括:上述的车辆行驶稳定性智能控制装置,车辆行驶稳定性智能控制装置与车载主机连接。
49.图4示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制方法的流程图;图5示出了根据本发明的一个实施例的一种车辆行驶稳定性智能控制方法的原理图。
50.如图4-5所示,一种车辆行驶稳定性智能控制方法,利用上述的车辆行驶稳定性智能控制装置,该方法包括:
51.利用前轮转角传感器获得前轮转角;
52.利用左扭矩传感器和右扭矩传感器获得左前轮扭矩和右前轮扭矩;
53.利用前轮转角、左前轮扭矩和右前轮扭矩结合方向盘转角控制车轮扭矩转向;
54.根据侧向加速度和横摆角速度控制车轮扭矩转向。
55.可选地,在利用前轮转角传感器检测前轮转角之前,使车辆正常直行;
56.方向盘转角不为0时,根据前轮转角和方向盘转角的差值,控制动力系统调整车轮扭矩进行转弯。
57.可选地,根据方向盘转角、前轮转角、左前轮扭矩和右前轮扭矩控制车轮扭矩转向
包括:
58.若方向盘转角为0,前轮转角为0或小于设定阀值,左前轮扭矩和右前轮扭矩的差值为0或小于设定阀值,保持直行;
59.若方向盘转角为0,前轮转角不为0或大于设定阀值,左前轮扭矩和右前轮扭矩的差值不为0或大于设定阀值,控制动力系统调整车轮扭矩,消除跑偏。
60.可选地,根据侧向加速度和横摆角速度控制车轮扭矩转向包括:
61.若前轮转角为0,且y向加速度为0或小于设定阀值,保持直行;
62.若前轮转角为0,y向加速度传感器不为0或大于设定阀值,调节转向系统保持直行。
63.可选地,根据侧向加速度和横摆角速度控制车轮扭矩转向还包括:
64.若方向盘转角为0,横摆角速度为0或小于设定阀值,保持直行。
65.若方向盘转角不为0,横摆角速度不为0或大于设定阀值,调节制动控制系统保持直行。
66.可选地,若方向盘转角为0,前轮转角不为0或大于设定阀值,左前轮扭矩和右前轮扭矩的差值不为0或大于设定阀值,控制动力系统调整车轮扭矩不能消除跑偏,则esp制动控制系统控制停车。
67.可选地,控制车轮扭矩转向包括反向扭矩和降低扭矩。
68.可选地,还包括监控车速,根据车速控制转向时两个前轮的转速。
69.本实施例车辆行驶稳定性智能控制方法使用时,以通过pcan(动力底盘can系统)通讯使用为例,
70.(1)车辆启动后,读取档位信息、车辆电压、eps电动转向系统、esp(或abs)制动稳定系统信息,确定各系统工作正常且处在d挡,执行下一项,否则待机、报警或限制运行;
71.(2)读取的车速数据且并与设定设定阀值相比,确定直行稳定系统是否参与工作;
72.(3)正常行驶状态,前轮转角与方向盘转角传感器数据一一对应,在方向盘转角传感器数据为零,而前轮转角不为0,则系统请求eps提供适当补偿力矩,保证前轮转角为直行状态。
73.(4)若方向盘转角不为0,说明驾驶员需要转向,系统通过两个传感数据比较,判断转向系统是否存在间隙需要补偿、若间隙合适,控制系统则不参与工作;
74.(5)读取前轮转角和传动轴力矩数据:
75.a)方向盘转角为0,若前轮转角为0(或小于设定阀值),且左右传动轴力矩差为0(或小于设定阀值),说明车辆已处在直行状态,系统无请求。
76.b)方向盘转角为0,若前轮转角不为0,左右传动轴扭矩也不等,且轮速小的一侧扭矩大,说明路面附着系数不够,动力系统请求降扭,直至跑偏现象消失;
77.c)方向盘转角0,前轮转角不为0,扭矩降低仍跑偏,esp制动稳定系统请求,车辆减速并至安全状态;
78.d)方向盘转角不为0,将方向盘转角和前轮转角进行比较,若存在偏差,可通过eps施加适当转向力矩,消除转向系统间隙;
79.e)辅助轮速传感器/ωz横摆加速度传感器/y向加速度传感器数据,综合判断车辆运行状态,确保系统策略控制的准确性。
80.(6)读取前轮转角和y向加速度器数据:
81.a)若前轮转角为0,且y向加速度传感器为0(或小于设定阀值),说明道路水平,车辆已处在直行状态,系统无请求。
82.b)若前轮转角为0,y向加速度传感器不为0(或大于设定阀值),判断为路面倾斜,转向系统提供适当力矩,并进行pid动态调节,保证车辆直行。
83.(7)读取前轮转角和ωz横摆加速度传感器数据:
84.a)若前轮转角为0,且ωz向加速度传感器为0(或小于设定阀值),车辆已处在直行状态,系统无请求。
85.若相差为0(或小于设定阀值),y向加速度传感器不为0(或大于设定阀值),判断为路面倾斜,转向系统提供适当力矩,并进行pid动态调节,保证车辆直行。
86.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1