自动搬运车的控制方法与流程
本发明是有关于一种自动工具车防撞方法,特别是指一种自动搬运车的控制方法。
背景技术:
1、近年来,随着科技进展,越来越多的技术应用需要电子装置之间的协同合作,而其中判别特定装置的位置以及电子装置之间位置的沟通是其中特别重要的部分,尤其是在物联网(iot)和工业4.0的无人工厂等应用上。近年许多工厂或物流仓储已导入无人搬运车/载具(agv)、自走车、自动导向车等来提升生产效率、效能并降低生产成本,因此一个有效率的无人搬运车控制系统越来越受到重视。
2、目前无人搬运车主要由磁条导航、磁钉导航、二维卷标条形码导航以及雷射导航等方式定位,借此让无人搬运车以系统或程序预定的方向移动,直到到达目的位置。但移动过程中很可能遇到预料外的障碍物,例如,其他无人搬运车、掉落的对象、现场工作人员,虽目前无人搬运车大多有障碍物侦测/防撞机制,但只能停止直到障碍排除后,再由操作人员手动控制该无人搬运车恢复移动,甚至必须将所有无人搬运车都停止运作以免撞上,不仅非常浪费时间且须暂停作业等待障碍排除,导致大幅降低无人搬运车工作效率,难以应付未来加入更多无人搬运车作业的情况,值得从业人员仔细探讨与改善。
技术实现思路
1、本发明要解决的技术问题是提供一种防撞的自动搬运车的控制方法。
2、为解决上述技术问题,本发明自动搬运车的控制方法,适用于一自动搬运车系统应用于一工作场域,该自动搬运车系统包含一无人搬运车、一设置于该无人搬运车上且用以侦测一障碍物的感测单元、一设置于该无人搬运车上且控制该无人搬运车移动的控制单元,及一电连接该感测单元与该控制单元的处理单元。该自动搬运车的控制方法包含一步骤(a)、一步骤(b)、一步骤(c)、一步骤(d)、一步骤(e) ,及一步骤(f)。
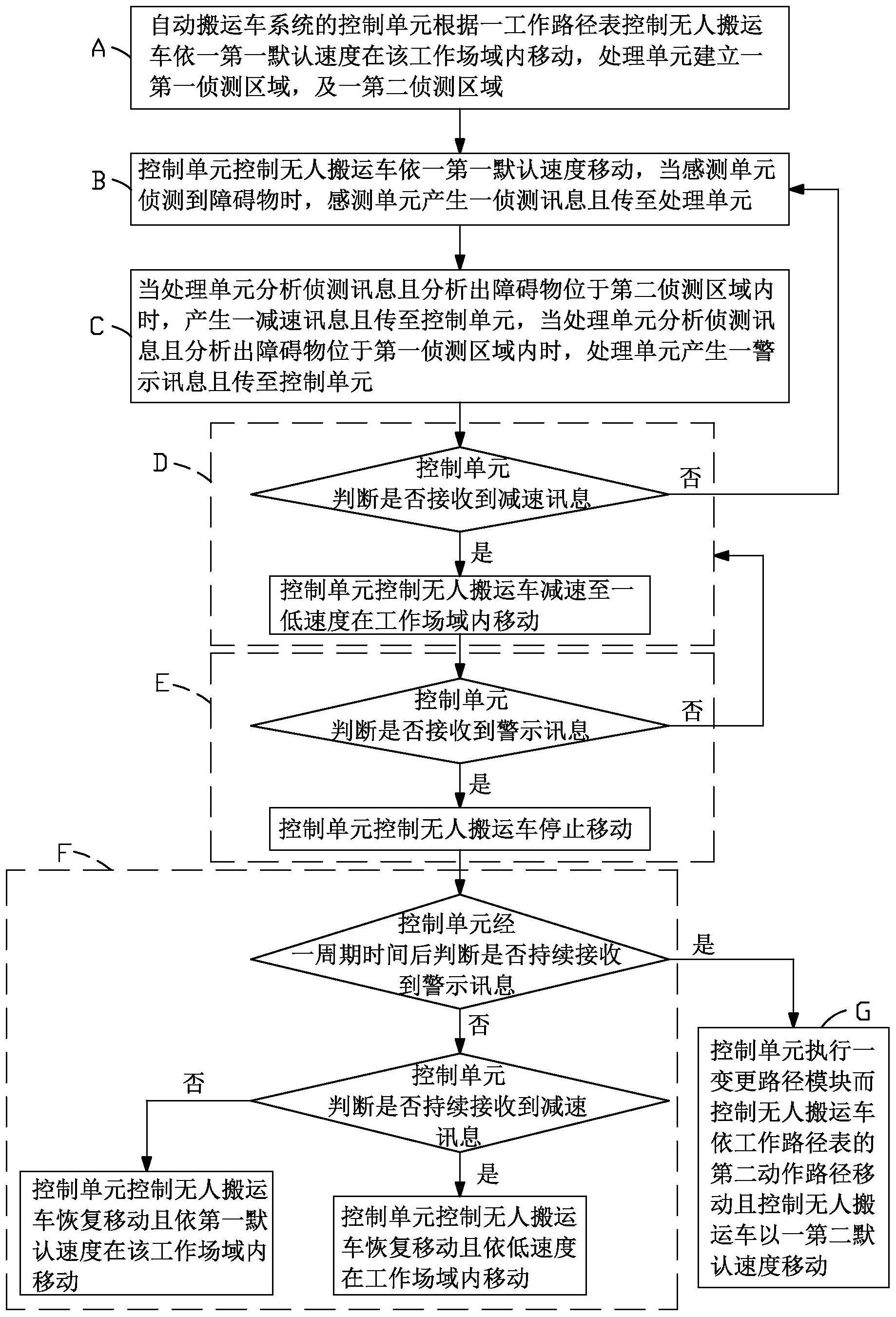
3、于该步骤(a)中,该自动搬运车系统的控制单元根据一工作路径表控制该无人搬运车依一第一默认速度在该工作场域内移动,该处理单元建立一围绕该无人搬运车周围的第一侦测区域,及一围绕该第一侦测区域外围的第二侦测区域。
4、于该步骤(b)中,该控制单元控制该无人搬运车依该第一默认速度移动,当该感测单元侦测到该障碍物时,该感测单元产生一侦测讯息且传至该处理单元,该侦测讯息记录有该无人搬运车与该障碍物的距离以及该障碍物的相对方向。
5、于该步骤(c)中,当该处理单元分析该侦测讯息且分析出该障碍物位于该第二侦测区域内时,该处理单元产生一减速讯息且传至该控制单元,当该处理单元分析该侦测讯息且分析出该障碍物位于该第一侦测区域内时,该处理单元产生一警示讯息且传至该控制单元。
6、于该步骤(d)中,该控制单元判断是否接收到该减速讯息,若判断为是,则该控制单元控制该无人搬运车减速至一低速度在该工作场域内移动;若判断为否,则回到该步骤(b)。
7、于该步骤(e)中,若于该步骤(d)中,该控制单元判断接收到该减速讯息后,该控制单元进一步判断是否接收到该警示讯息,若判断为是,则该控制单元控制该无人搬运车停止移动;若判断为否,则回到该步骤(d)。
8、于该步骤(f)中,该控制单元经一周期时间后判断是否持续接收到该警示讯息,若该控制单元判断未接收到该警示讯息后,该控制单元进一步判断是否持续接收到该减速讯息,若判断为是,则该控制单元控制该无人搬运车恢复移动且依该低速度在该工作场域内移动,若判断为否;则该控制单元控制该无人搬运车恢复移动且依该第一默认速度在该工作场域内移动。
9、相较于现有技术,本发明借由于该步骤(c)中,该处理单元分析出该障碍物位于该第二侦测区域内时,传送该减速讯息至该控制单元,或分析出该障碍物位于该第一侦测区域内时,传送该警示讯息至该控制单元的设计,且配合于该步骤(d)与该步骤(e)中,该控制单元收到该减速讯息后控制该无人搬运车减速至该低速度或收到该警示讯息后该控制单元控制该无人搬运车停止移动的应用,达成该无人搬运车移动过程中,可依该障碍物位于该第二侦测区域或该第一侦测区域的位置,该控制单元分阶段控制该无人搬运车减速或停止,有效避免撞到障碍物的问题。并透过该步骤(f)中,该控制单元经该周期时间后判断是否持续接收到该警示讯息或该减速讯息的情况,自动控制该无人搬运车恢复成该低速度移动或恢复成该第一默认速度移动,改善以往该无人搬运车需要由操作者手动控制该无人搬运车恢复移动的问题,大幅节省时间且有效提高工作效率。
技术特征:
1.一种自动搬运车的控制方法,适用于一自动搬运车系统应用于一工作场域,该自动搬运车系统包含一无人搬运车、一设置于该无人搬运车上且用以侦测一障碍物的感测单元、一设置于该无人搬运车上且控制该无人搬运车移动的控制单元,及一电连接该感测单元与该控制单元的处理单元,其特征在于,该自动搬运车的控制方法包含以下步骤:
2.如权利要求1所述的自动搬运车的控制方法,还包含一接续于该步骤(f)的步骤(g),其特征在于,该工作路径表具有一第一动作路径,及一第二动作路径,该第二动作路径为绕开该障碍物的动作路径,于该步骤(a)中,该自动搬运车系统的控制单元根据该工作路径表的一第一动作路径控制该无人搬运车依该第一默认速度在该工作场域内移动,其中,于该步骤(f)中,该控制单元经该周期时间后判断持续接收到该警示讯息,于该步骤(g)中,该控制单元执行一变更路径模块而控制该无人搬运车依该工作路径表的第二动作路径在该工作场域内移动且控制该无人搬运车以一第二默认速度移动。
3.如权利要求2所述的自动搬运车的控制方法,其特征在于,该步骤(a)中,该第一侦测区域为圆环形区域,该第二侦测区域为圆环形区域。
4.如权利要求2所述的自动搬运车的控制方法,其特征在于,于该步骤(g)中,该控制单元执行该变更路径模块时,会同步发送一调整讯息至该处理单元,而该处理单元接收到该调整讯息后,执行一调整模块且依该无人搬运车的第二动作路径的方向与该第二默认速度调整该第一侦测区域与该第二侦测区域的范围与形状。
5.如权利要求4所述的自动搬运车的控制方法,其特征在于,该第二默认速度大于该第一默认速度。
6.如权利要求5所述的自动搬运车的控制方法,其特征在于,于该步骤(g)中,该处理单元执行该调整模块且将该第一侦测区域与该第二侦测区域的范围调整为往该无人搬运车的第二动作路径的方向延伸的范围。
7.如权利要求5所述的自动搬运车的控制方法,其特征在于,于该步骤(g)中,该第一侦测区域调整为椭圆环形区域,该第二侦测区域为椭圆环形区域。
技术总结
一种自动搬运车的控制方法,适用于一自动搬运车系统在一工作场域。该自动搬运车系统包含一无人搬运车、一用以侦测一障碍物的感测单元、一控制该无人搬运车移动的控制单元,及一处理单元。该自动搬运车的控制方法,借由一步骤(C)中,该处理单元依该障碍物位于一第二侦测区域内时,传送该减速讯息;或位于该第一侦测区域内时,传送该警示讯息的设计,且配合于一步骤(D)与一步骤(E)中,该控制单元收到该减速讯息后控制该无人搬运车减速至该低速度或收到该警示讯息后该控制单元控制该无人搬运车停止移动的应用,达成可依该障碍物位于该第二侦测区域或该第一侦测区域的位置,而分阶段控制该无人搬运车减速或停止,有效避免撞到障碍物的问题。
技术研发人员:林俊宏
受保护的技术使用者:昆达电脑科技(昆山)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!