一种市政河道节能型检测用机器人的制作方法
1.本发明涉及河道环境检测技术领域,尤其涉及一种市政河道节能型检测用机器人。
背景技术:
2.水质监测是监视和测定水体中污染物的种类、各类污染物的浓度及变化趋势,评价水质状况以及其周边的空气质量,监测范围十分广泛,水环境检测装置有着非常广泛的水质检测与测试应用,如河流、湖泊、池塘、水坝、井、海洋、地下水、工业废水、城市污水、农业用水、养鱼场等。
3.目前通过设置爬行类机器人远程控制对市政河道的水质及周边环境进行检测,但是对于河道中心的水质及空气质量检测十分困难,爬行类机器人通过两侧的浮板可漂浮在水面进行抽样检测,但是这样就阻碍了机器人在陆地上的行走,所以本发明的提出,解决了上述技术问题的不足。
技术实现要素:
4.基于现有的市政河道检测用机器人对于河道中心的水质及空气质量检测十分困难且阻碍该机器人在陆地上活动的技术问题,本发明提出了一种市政河道节能型检测用机器人。
5.本发明提出的一种市政河道节能型检测用机器人,包括驱动底座和太阳能电池板,所述驱动底座的两侧设置有行走履带,所述行走履带的一侧表面固定连接有浮板底座;所述驱动底座的上表面设置有检测调节装置,所述检测调节装置包括转盘,所述转盘设置在所述太阳能电池板的下表面,驱动所述太阳能电池板多角度转动吸收光照;所述浮板底座的表面设置有折叠装置,所述折叠装置包括浮板机翼,所述浮板机翼进行展开或收缩,使该河道检测机器人便于进行水陆两栖活动;所述驱动底座的一侧设置有螺旋力推动装置,所述螺旋力推动装置包括收缩螺旋桨片,所述收缩螺旋桨片在展开时进行转动,可推动该河道检测机器人在水面上进行推进,从而对环境进行检测。
6.优选地,所述驱动底座的上表面固定连接有检测摄像机,所述驱动底座的一侧表面固定连接有照明探灯,所述驱动底座的上表面固定连接有有毒有害气体报警器、压力传感器和温湿度传感器。
7.通过上述技术方案,驱动底座控制行走履带带动其行走,驱动底座上表面的检测摄像机对市政河道周边环境进行拍摄监控,可通过远程进行控制,通过有毒有害气体报警器、压力传感器和温湿度传感器对河道周边的环境质量进行检测,通过照明探灯对驱动底座的移动进行照明设置。
8.优选地,所述驱动底座的上表面固定连接有电池座,所述电池座的上表面通过联轴器固定连接有转轴,所述转轴的外表面与所述转盘的表面固定套接,所述转盘的上表面
固定连接有仰角杆,所述仰角杆的上表面固定连接有支撑盘。
9.通过上述技术方案,电池座内部设置有蓄电池组,可对太阳能电池板转换的电能进行储存,且电池座内部设置有转动电机,带动转轴进行转动,从而使得转盘带动仰角杆进行转动,仰角杆的长度不一致,从而使得支撑盘呈仰角分布。
10.优选地,所述支撑盘的上表面固定连接有三叉连接筒,所述三叉连接筒的内壁转动套接有弯杆,所述太阳能电池板的一侧表面与所述弯杆的一侧表面固定连接,所述转轴的上表面通过连接杆固定连接有球座,所述弯杆的下表面固定连接有牵引球,所述牵引球的外表面与所述球座的内壁转动卡接。
11.通过上述技术方案,转盘带动仰角杆上的支撑盘进行转动,太阳能电池板一侧表面又通过弯杆下表面的牵引球与转轴上表面的球座内部转动卡接,从而转动的三叉连接筒带动其内部的弯杆一侧的太阳能电池板呈雷达式俯仰角摆动,进而能充分吸收光照,储蓄的电能可供河道检测机器人使用,从而达到节能的效果。
12.优选地,所述浮板底座的表面开设有安装凹面,所述安装凹面的内底壁固定连接有安装座,所述安装座的一端表面开设有球面凹型座,所述浮板机翼的一侧表面贯穿开设有球形槽,所述球形槽的内壁与所述安装座的表面滑动连接,所述浮板机翼的一侧表面与所述安装凹面的一侧表面滑动连接。
13.通过上述技术方案,安装凹面呈l型开设,便于浮板机翼折叠时贴于安装座与安装凹面的一侧,在浮板机翼展开时,安装座的球面凹型座与浮板机翼的球形槽进行连接,形成完整的半球凹面,从而便于折叠机翼水平展开,当浮板机翼折叠时,球形槽的侧壁在球面凹型座的表面进行滑动收缩。
14.优选地,所述球面凹型座的内底壁转动连接有转杆,所述转杆的外表面固定套接有驱动弧形杆,所述驱动弧形杆的一侧表面通过连接轴转动连接有中间弧形杆,所述中间弧形杆的一侧表面通过连接轴固定连接有连接弧形杆,所述连接弧形杆的一侧表面通过连接轴与所述球形槽的内壁转动连接,所述连接弧形杆的另一端表面通过连接轴与所述球面凹型座的内侧壁转动连接。
15.通过上述技术方案,球面凹型座的内部安装有电机,从而通过控制可驱动转杆进行转动,转杆通过驱动弧形杆、中间弧形杆与连接弧形杆进行连接,连接弧形杆又将浮板机翼与安装座进行连接,从而转杆在顺时针转动,在球面四杆联动机构的作用下,浮板机翼进行翻折贴合在安装座的一侧,从而可避免浮板机翼的展开使得机器人在陆地上行走时受到阻力。
16.优选地,所述驱动底座的一侧表面固定连接有尾翼安装板,所述尾翼安装板的是上表面固定连接有液压机,所述液压机的活塞杆下表面固定连接有活动底板,所述活动底板的一侧表面与所述尾翼安装板的一侧表面滑动卡接,所述尾翼安装板的下表面固定连接有缓冲伸缩杆。
17.通过上述技术方案,尾翼安装板呈倒l型安装在驱动底座的尾侧,通过其上表面的液压机动作,可使其活塞杆推动活动底板在尾翼安装板的侧壁进行向下滑动,可使得收缩螺旋桨片伸入水底,缓冲伸缩杆的外表面套接有缓冲弹簧,可对活动底板的推动过程进行缓冲,保证结构的稳定性。
18.优选地,所述活动底板的下表面固定连接有水质传感器,所述活动底板的上表面
固定连接有减速电机,所述减速电机的输出轴外表面通过联轴器固定连接有第一主动锥齿轮,所述第一主动锥齿轮的外表面啮合有双锥齿轮杆,所述双锥齿轮杆的下端外表面啮合有第二主动锥齿轮,所述第二主动锥齿轮的一侧表面通过连接杆固定连接有拉动气缸,所述拉动气缸的活塞杆外表面活动套接有铰接盘,所述铰接盘的外表面与收缩螺旋桨片的外表面铰接,所述收缩螺旋桨片的表面与所述拉动气缸的活塞杆外表面铰接。
19.通过上述技术方案,水质传感器随着活动底板的下降可伸入至水中,从而可对河道内的水流进行检测,在转杆逆时针通过驱动弧形杆、中间弧形杆及连接弧形杆带动浮板机翼进行翻折打开时,通过控制减速电机工作,使其带动第一主动锥齿轮进行转动,从而使得啮合的双锥齿轮杆进行转动,也就使的第二主动锥齿轮进行转动,再通过拉动气缸的活塞杆推动收缩螺旋桨片进行打开,使得第二主动锥齿轮通过拉动气缸带动展开的收缩螺旋桨片进行转动,从而可推动驱动底座在水面上进行前进。
20.优选地,所述活动底板的下表面固定连接有支撑板,所述活动底板的下表面开设有安装腔,所述安装腔的内部固定安装有转动电机,所述支撑板的表面转动套接有驱动筒,所述驱动筒的下表面固定连通有套箱,所述驱动筒的内部和所述套箱的内部与所述双锥齿轮杆的外表面和所述拉动气缸的外表面活动套接,所述套箱的一侧表面固定连通有连接套筒,所述连接套筒的一端内侧壁与所述铰接盘的外表面滑动卡接。
21.通过上述技术方案,支撑板以及支撑板表面转动套接的驱动筒和连通的套箱对双锥齿轮杆以及拉动气缸进行安装支撑,通过活动底板下降带动支撑板上的机构伸入水底,通过驱动筒的转动,可使得其带动转动的收缩螺旋桨片进行左右摆动,从而可控制驱动底座在水面动作的方向,通过拉动气缸的活塞杆拉动铰接盘,可使得铰接盘收缩进连接套筒的内部,同时使展开的收缩螺旋桨片进行收缩,可便于驱动底座在陆地上行走。
22.优选地,所述驱动筒的外表面固定套接有蜗轮齿轮,所述支撑板的上表面通过支撑耳板转动连接有蜗杆,所述蜗轮齿轮的外表面与所述蜗杆的外表面啮合,所述转动电机的输出轴外表面通过联轴器与所述蜗杆的一侧表面固定连接。
23.通过上述技术方案,安装腔内的转动电机带动支撑耳板上的蜗杆进行转动,从而可使得啮合的蜗轮齿轮进行转动,进而使得驱动筒及套箱进行转动,最终实现收缩螺旋桨片的左右摆动。
24.本发明中的有益效果为:1、通过设置检测调节装置,可对市政河道进行环境检测,同时达到节能的效果,在调节的过程中,通过转盘带动仰角杆上的支撑盘进行转动,太阳能电池板一侧表面又通过弯杆下表面的牵引球与转轴上表面的球座内部转动卡接,从而转动的三叉连接筒带动其内部的弯杆一侧的太阳能电池板呈雷达式俯仰角摆动,进而能充分吸收光照,储蓄的电能可供河道检测机器人使用,从而达到节能的效果。
25.2、通过设置折叠装置,可对市政河道检测机器人用于浮在水面的浮板进行折叠收纳,避免影响机器人陆地上的活动,在调节的过程中,通过控制驱动转杆进行转动,转杆通过驱动弧形杆、中间弧形杆与连接弧形杆进行连接,连接弧形杆又将浮板机翼与安装座进行连接,从而转杆在顺时针转动,在球面四杆联动机构的作用下,浮板机翼进行翻折贴合在安装座的一侧,从而可避免浮板机翼的展开使得机器人在陆地上行走时受到阻力。
26.3、通过设置螺旋力推动装置,可对市政河道检测机器人浮在水面上进行推进,从
而可对河道中心进行检测,在调节的过程中,通过控制减速电机工作,使其带动第一主动锥齿轮进行转动,从而使得啮合的双锥齿轮杆进行转动,也就使的第二主动锥齿轮进行转动,再通过拉动气缸的活塞杆推动收缩螺旋桨片进行打开,使得第二主动锥齿轮通过拉动气缸带动展开的收缩螺旋桨片进行转动,从而可推动驱动底座在水面上进行前进,实现市政河道检测机器人的水面动作。
附图说明
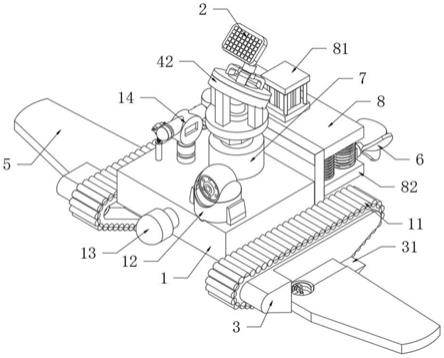
27.图1为本发明提出的一种市政河道节能型检测用机器人的示意图;图2为本发明提出的一种市政河道节能型检测用机器人的检测摄像机结构立体图;图3为本发明提出的一种市政河道节能型检测用机器人的电池座结构立体图;图4为本发明提出的一种市政河道节能型检测用机器人的球座结构立体图;图5为本发明提出的一种市政河道节能型检测用机器人的三叉连接筒结构立体图;图6为本发明提出的一种市政河道节能型检测用机器人的浮板底座结构立体图;图7为本发明提出的一种市政河道节能型检测用机器人的安装座结构立体图;图8为本发明提出的一种市政河道节能型检测用机器人的浮板机翼结构立体图;图9为本发明提出的一种市政河道节能型检测用机器人的尾翼安装板结构立体图;图10为本发明提出的一种市政河道节能型检测用机器人的水质传感器结构立体图;图11为本发明提出的一种市政河道节能型检测用机器人的双锥齿轮杆结构立体图;图12为本发明提出的一种市政河道节能型检测用机器人的套箱结构立体图。
28.图中:1、驱动底座;11、行走履带;12、检测摄像机;13、照明探灯;14、有毒有害气体报警器;15、压力传感器;16、温湿度传感器;2、太阳能电池板;3、浮板底座;31、安装凹面;32、安装座;33、球面凹型座;34、转杆;35、驱动弧形杆;36、中间弧形杆;37、连接弧形杆;4、转盘;41、仰角杆;42、支撑盘;43、三叉连接筒;44、弯杆;5、浮板机翼;51、球形槽;6、收缩螺旋桨片;7、电池座;71、转轴;72、球座;73、牵引球;8、尾翼安装板;81、液压机;82、活动底板;821、安装腔;822、转动电机;83、缓冲伸缩杆;84、水质传感器;85、减速电机;86、第一主动锥齿轮;87、双锥齿轮杆;88、第二主动锥齿轮;89、拉动气缸;891、铰接盘;9、支撑板;91、驱动筒;92、套箱;93、连接套筒;94、蜗轮齿轮;95、蜗杆。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.参照图1-12,一种市政河道节能型检测用机器人,包括驱动底座1和太阳能电池板2,驱动底座1的两侧设置有行走履带11,行走履带11的一侧表面固定连接有浮板底座3;驱动底座1的上表面设置有检测调节装置,检测调节装置包括转盘4,转盘4设置在
太阳能电池板2的下表面,驱动太阳能电池板2多角度转动吸收光照;为了对河道环境进行检测,在驱动底座1的上表面固定连接检测摄像机12,为了使驱动底座1在光照暗的情况下进行驱动,在驱动底座1的一侧表面固定连接照明探灯13,为了使机器人对市政河道进行空气质量的检测,在驱动底座1的上表面固定连接有毒有害气体报警器14、压力传感器15和温湿度传感器16;为了对太阳能电池板2收集的电能进行储存,在驱动底座1的上表面固定连接电池座7,为了对太阳能电池板2的光照角度进行调节,在电池座7的上表面通过联轴器固定连接转轴71,为了使转盘4能够转动,从而带动转盘4上方的太阳能电池板2进行调节,使转轴71的外表面与转盘4的表面固定套接,为了控制太阳能电池板2进行仰角安装吸收光照,在转盘4的上表面固定连接有仰角杆41,并使仰角杆41的上表面固定连接有支撑盘42;为了使支撑盘42对太阳能电池板2进行安装,在支撑盘42的上表面固定连接有三叉连接筒43,为了使转动的太阳能电池板2保持仰角轴向转动,在三叉连接筒43的内壁转动套接有弯杆44,并使太阳能电池板2的一侧表面与弯杆44的一侧表面固定连接,为了使转轴71能牵引太阳能电池板2一侧的弯杆44进行转动,在弯杆44的下表面固定连接有牵引球73,并在转轴71的上表面通过连接杆固定连接有球座72,使牵引球73的外表面与球座72的内壁转动卡接,从而转动的三叉连接筒43带动其内部的弯杆44一侧的太阳能电池板2呈雷达式俯仰角摆动,进而能充分吸收光照。
31.浮板底座3的表面设置有折叠装置,折叠装置包括浮板机翼5,浮板机翼5进行展开或收缩,使该河道检测机器人便于进行水陆两栖活动;为了对折叠装置进行安装,便于其动作,在浮板底座3的表面开设有安装凹面31,为了使安装凹面31能与浮板机翼5进行安装连接,在安装凹面31的内底壁固定连接有安装座32,为了能使浮板机翼5进行翻转折叠,使其贴于安装座32的一侧,在装座的一端表面开设有球面凹型座33,并在浮板机翼5的一侧表面贯穿开设有球形槽51,使球形槽51的内壁与安装座32的表面滑动连接,而浮板机翼5的一侧表面与安装凹面31的一侧表面滑动连接,从而在浮板机翼5展开时,安装座32的球面凹型座33与浮板机翼5的球形槽51进行连接,形成完整的半球凹面,从而便于折叠机翼水平展开;为了驱动浮板机翼5进行折叠收纳,在球面凹型座33的内底壁转动连接有转杆34,为了使转杆34转动的过程能带动浮板机翼5进行折叠收纳,在转杆34的外表面固定套接有驱动弧形杆35,使转杆34带动其转动,为了使驱动弧形杆35转动能牵引浮板机翼5进行转动折叠,在驱动弧形杆35的一侧表面通过连接轴转动连接有中间弧形杆36,并在中间弧形杆36的一侧表面通过连接轴固定连接有连接弧形杆37,使连接弧形杆37的一侧表面通过连接轴与球形槽51的内壁转动连接,并使连接弧形杆37的另一端表面通过连接轴与球面凹型座33的内侧壁转动连接,从而转杆34在顺时针转动,在球面四杆联动机构的作用下,浮板机翼5进行翻折贴合在安装座32的一侧。
32.驱动底座1的一侧设置有螺旋力推动装置,螺旋力推动装置包括收缩螺旋桨片6,收缩螺旋桨片6在展开时进行转动,可推动该河道检测机器人在水面上进行推进,从而对环境进行检测;为了对螺旋力推动装置进行安装,在驱动底座1的一侧表面固定连接有尾翼安装板8,为了对河道水质进行检测,在尾翼安装板8的底部设置有水质传感器84,为了推动水质
传感器84伸入水中,在尾翼安装板8的是上表面固定连接有液压机81,为了对水质传感器84进行安装,在液压机81的活塞杆下表面固定连接有活动底板82,并使活动底板82的一侧表面与尾翼安装板8的一侧表面滑动卡接,从而起到向导作用,为了对液压机81的推力进行缓冲,在尾翼安装板8与活动底板82之间设置有缓冲伸缩杆83;为了能驱动收缩螺旋桨片6进行收缩或打开,在活动底板82的上表面固定连接有减速电机85,并在其输出轴外表面通过联轴器固定连接有第一主动锥齿轮86,为了使转动的第一主动锥齿轮86带动展开的收缩螺旋桨片6进行转动,从而推动驱动底座1,在第一主动锥齿轮86的外表面啮合有双锥齿轮杆87,并使双锥齿轮杆87的外表面啮合第二主动锥齿轮88,为了使收缩螺旋桨片6进行收缩或打开,在第二主动锥齿轮88的一侧表面通过连接杆固定连接有拉动气缸89,并在拉动气缸89的活塞杆外表面活动套接有铰接盘891,并使铰接盘891的外表面与收缩螺旋桨片6的外表面铰接,所而且收缩螺旋桨片6的表面与拉动气缸89的活塞杆外表面铰接,从而减速电机85工作,使其带动第一主动锥齿轮86进行转动,从而使得啮合的双锥齿轮杆87进行转动,也就使得第二主动锥齿轮88进行转动,再通过拉动气缸89的活塞杆推动收缩螺旋桨片6进行打开,使得第二主动锥齿轮88通过拉动气缸89带动展开的收缩螺旋桨片6进行转动,从而可推动驱动底座1在水面上进行前进;为了对双锥齿轮杆87进行支撑安装,在活动底板82的下表面固定连接有支撑板9,使支撑板9的表面转动套接有驱动筒91,并且在其下表面固定连通有套箱92,从而使得驱动筒91的内部和套箱92的内部与双锥齿轮杆87的外表面和拉动气缸89的外表面活动套接,为了对收缩的收缩螺旋桨片6进行收纳,在套箱92的一侧表面固定连通有连接套筒93,使连接套筒93的一端内侧壁与铰接盘891的外表面滑动卡接;为了使驱动底座1在水面上的推动能够调整方向,在驱动筒91的外表面固定套接有蜗轮齿轮94,为了使蜗轮齿轮94带动驱动筒91以及连接的套箱92进行转动套接,在支撑板9的上表面通过支撑耳板转动连接有蜗杆95,使蜗轮齿轮94的外表面与蜗杆95的外表面啮合,从而转动的蜗杆95带动蜗轮齿轮94转动,为了使蜗杆95转动,在活动底板82的下表面开设有安装腔821,并在其内部安装有转动电机822,使转动电机822的输出轴外表面通过联轴器与蜗杆95的一侧表面固定连接,从而可使得啮合的蜗轮齿轮94进行转动,进而使得驱动筒91及套箱92进行转动,最终实现收缩螺旋桨片6的左右摆动。
33.工作原理:本发明在具体的实施例中,通过驱动底座1控制行走履带11带动其行走,驱动底座1上表面的检测摄像机12对市政河道周边环境进行拍摄监控,通过有毒有害气体报警器14、压力传感器15和温湿度传感器16对河道周边的环境质量进行检测,通过照明探灯13对驱动底座1的移动进行照明设置;当需要对河道中心进行检测时,通过行走履带11使机器人驶入水中,通过球面凹型座33的内部安装电机,从而通过控制可驱动转杆34进行转动,转杆34通过驱动弧形杆35、中间弧形杆36与连接弧形杆37进行连接,连接弧形杆37又将浮板机翼5与安装座32进行连接,从而转杆34在逆时针转动时,在球面四杆联动机构的作用下,安装座32的球面凹型座33与浮板机翼5的球形槽51进行连接,形成完整的半球凹面,从而便于折叠机翼水平展开,使机器人浮于水面;然后通过控制尾翼安装板8上表面的液压机81动作,可使其活塞杆在缓冲伸缩杆83的辅助下推动活动底板82在尾翼安装板8的侧壁进行向下滑动,可使得收缩螺旋桨片6伸
入水底,水质传感器84随着活动底板82的下降可伸入至水中,从而可对河道内的水流进行检测,再通过控制减速电机85工作,使其带动第一主动锥齿轮86进行转动,从而使得啮合的双锥齿轮杆87进行转动,也就使得第二主动锥齿轮88进行转动,再通过拉动气缸89的活塞杆推动收缩螺旋桨片6进行打开,使得第二主动锥齿轮88通过拉动气缸89带动展开的收缩螺旋桨片6进行转动,从而可推动驱动底座1在水面上进行前进,通过控制安装腔821内的转动电机822带动支撑耳板上的蜗杆95进行转动,从而可使得啮合的蜗轮齿轮94进行转动,进而使得驱动筒91及套箱92进行转动,最终实现收缩螺旋桨片6的左右摆动,使驱动底座1在水面上进行推进;通过驱动底座1上的电池座7内部的转动电机822带动转轴71进行转动,从而使得转盘4带动仰角杆41进行转动太阳能电池板2一侧表面又通过弯杆44下表面的牵引球73与转轴71上表面的球座72内部转动卡接,从而转动的三叉连接筒43带动其内部的弯杆44一侧的太阳能电池板2呈雷达式俯仰角摆动,进而能充分吸收光照,储蓄的电能可供河道检测机器人使用,从而达到节能的效果。
34.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1