一种基于双绕组电机的线控电液制动耦合系统的制作方法
1.本发明属于汽车制动系统技术领域,涉及车辆主动安全技术,具体指代一种基于双绕组电机的线控电液制动耦合系统,用于提高乘用车的行驶安全性。
背景技术:
2.随着汽车电子在整车中占比不断提高,世界各国都在积极推动交通能源领域的清洁和可持续发展,电动出行、车联网和自动驾驶是发展趋势,它们对汽车制动系统提出了新的要求,线控制动功能安全设计越来越受到重视。乘用车线控电液制动耦合系统能够通过电机对驾驶员制动进行助力,具有较好的动态性能和可控性,满足当前汽车对制动系统的新的工作需求。
3.然而,由于制动系统工作环境恶劣,结构复杂和行驶工况较多等特点,当驾驶员制动行为出现错误、注意力不集中、驾驶员工况判别失误以及电机出现故障时,会带来一系列的安全隐患。目前线控电液制动系统主要采用单绕组形式,制动系统的综合性能大大下降,不能够及时、有效地避免线控电液制动耦合系统工作可能发生的不稳定问题。
技术实现要素:
4.针对上述存在的问题,本发明的目的在于提供一种基于双绕组电机的线控电液制动耦合系统,用以实现对线控电液制动耦合系统在行驶途中,可能面临到的驾驶员误踩驱动踏板、制动输入反应延迟、电机工作故障和路况识别进行判断和修正,提高制动系统的可靠性。
5.为实现上述目的,本发明具体技术方案如下:
6.一种基于双绕组电机的线控电液制动耦合系统,其特征在于,包括:误踩驱动踏板警示模块、制动输入反应感知模块、适用于分类的驾驶员制动意图自适应识别预测处理模块、线控电液制动耦合系统模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块、路况监督模块和双绕组电机主控制器;
7.所述误踩驱动踏板警示模块,其通过检测驱动踏板加速度和驱动踏板力,利用模糊语言控制器,识别驾驶员误踩驱动踏板概率,当误踩驱动踏板概率大于0.8时,触发座椅靠背推打警示控制器开关,警示驾驶员误踩行为;
8.所述制动输入反应感知模块,其通过采集制动输入侧向距离、制动输入纵向距离、座舱内部温度以及行驶坡度信号,并利用制动输入反应状态感知公式判断驾驶员制动输入反应延迟状态,调整驾驶员制动输入行为;
9.所述适用于分类的驾驶员制动意图自适应识别预测处理模块用于对主缸压力传感器、惯性导航系统和所述制动踏板位置传感器采集的信号进行处理,判断驾驶员在助力制动模式下的制动风格,包括信号采集单元、信号滤波处理单元、特征参数选取单元、参数指标初次降维处理单元、自适应优化二次降维处理单元以及分类预测处理单元;
10.所述线控电液制动耦合系统模块包括输入推杆、双三相相移180
°
双绕组电机、减
速传动机构、力耦合机构、输出推杆和制动主缸,其双三相相移180
°
双绕组电机又包括相位互差180
°
电角度的第一工作绕组和第二工作绕组、相位互差180
°
电角度的第一激励源和第二激励源、霍尔位置式传感器、第一绕组电流传感器、第二绕组电流传感器,用于将驾驶员制动输入力和双绕组电机助力进行耦合作用输出,从而推动制动主缸,产生车辆制动时所需减速度;
11.所述双三相相移180
°
双绕组电机自检决策处理模块,其通过故障检测逻辑处理判断所述双三相相移180
°
双绕组电机的故障模式,分为正常工作模式、单绕组故障模式和全绕组故障模式;
12.所述双三相相移180
°
双绕组电机自动均流逼近控制模块对所述双三相相移180
°
双绕组电机故障模式进行控制,正常工作模式下对绕组电流进行自动均流设置,单绕组故障模式下让正常绕组以保证电机带载能力不变前提下单独工作以实现制动冗余;
13.所述路况监督模块包括前监测器、左监测器、右监测器和后监测器,监测车辆周围工况,利用主动制动需求检测公式辅助驾驶员在未踩制动踏板时对车辆需制动情况下主动制动模式需求进行判断;
14.所述双绕组电机主控制器接收所述适用于分类的驾驶员制动意图自适应识别预测处理模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块和路况监督模块的信号,对驾驶员助力制动模式和主动制动模式下控制所述双三相相移180
°
双绕组电机执行以及在单绕组故障模式和全绕组故障模式下发出切断电源指令。
15.进一步地,所述误踩驱动踏板警示模块包括驱动踏板加速度传感器、驱动踏板压力传感器、模糊语言控制器和座椅靠背推打警示控制器;所述驱动踏板加速度传感器和驱动踏板压力传感器分别检测驾驶员误踩驱动踏板产生的驱动踏板加速度和驱动踏板力;
16.所述模糊语言控制器输入模糊集为当前驱动踏板加速度和驱动踏板力,其模糊子集定义为a
dri
={vsa,sa,ma,la,vla},即{非常小,较小,中等,较大,非常大},取值范围定义为[0,30],f
dri
={vsf,sf,mf,lf,vlf},即{非常小,较小,中等,较大,非常大},取值范围定义为[0,450],输出模糊集为驾驶员误踩驱动踏板概率,其模糊子集定义为p
mis
={vsp,sp,mp,lp,vlp},即{很小,较小,中等,较大,很大},取值范围定义为[0,100];其中a
dri
为驱动踏板加速度,单位为m/s2,f
dri
为驱动踏板力,单位为n,p
mis
为驾驶员误踩驱动踏板概率;模糊控制规则定义:若a
dri
非常小且f
dri
非常小则p
dri
很小,若a
dri
非常小且f
dri
较小则p
mis
非常小,若a
dri
非常小且f
dri
中等则p
mis
非常小,若a
dri
非常小且f
dri
较大则p
mis
较小,若a
dri
非常小且f
dri
非常大则p
mis
较小,若a
dri
较小且f
dri
非常小则p
mis
非常小,若a
dri
较小且f
dri
较小则p
mis
非常小,若a
dri
较小且f
dri
中等则p
mis
较小,若a
dri
较小且f
dri
较大则p
mis
中等,若a
dri
较小且f
dri
非常大则p
mis
较大,若a
dri
中等且f
dri
非常小则p
mis
非常小,若a
dri
中等且f
dri
较小则p
mis
较小,若a
dri
中等且f
dri
中等则p
mis
中等,若a
dri
中等且f
dri
较大则p
mis
较大,若a
dri
中等且f
dri
非常大则p
mis
非常大,若a
dri
较大且f
dri
非常小则p
mis
较小,若a
dri
较大且f
dri
较小则p
mis
中等,若a
dri
较大且f
dri
中等则p
mis
较大,若a
dri
较大且f
dri
较大则p
mis
较大,若a
dri
较大且f
dri
非常大则p
mis
很大,若a
dri
非常大且f
dri
非常小则p
mis
中等,若a
dri
非常大且f
dri
较小则p
mis
中等,若a
dri
非常大且f
dri
中等则p
mis
较大,若a
dri
非常大且f
dri
较大则p
mis
很大,若a
dri
非常大且f
dri
非常大则p
mis
很大;
[0017]
上述模糊逻辑控制规则为:
[0018][0019]
选取输入模糊集和输出模糊集隶属函数:
[0020][0021][0022][0023]
式中,为驱动踏板加速度控制量变化,为驱动踏板力控制量变化,为误踩驱动踏板概率控制量变化,μ
vsa
(a
dri
)为a
dri
属于vsa集合的隶属度,μ
sa
(a
dri
)为a
dri
属于sa集合的隶属度,μ
ma
(a
dri
)为a
dri
属于ma集合的隶属度,μ
la
(a
dri
)为a
dri
属于la集合的隶属度,μ
vla
(a
dri
)为a
dri
属于vla集合的隶属度,μ
vsf
(f
dri
)为f
dri
属于vsf集合的隶属度,μ
sf
(f
dri
)为f
dri
属于sf集合的隶属度,μ
mf
(f
dri
)为f
dri
属于mf集合的隶属度,μ
lf
(f
dri
)为f
dri
属于lf集合的隶属度,μ
vlf
(f
dri
)为f
dri
属于vlf集合的隶属度,μ
vsp
(p
mis
)为p
mis
属于vsp集合的隶属度,μ
sp
(p
mis
)为p
mis
属于sp集合的隶属度,μ
mp
(p
mis
)为p
mis
属于mp集合的隶属度,μ
lp
(p
mis
)为p
mis
属于lp集合的隶属度,μ
vlp
(p
mis
)为p
mis
属于vlp集合的隶属度;
[0024]
所述座椅靠背推打警示控制器置于座椅靠背内侧中间位置,可通过其内部机构对驾驶员后背以180赫兹频率推打;当所述模糊语言控制器模糊推理误踩驱动踏板概率结果大于0.8时,所述座椅靠背推打警示控制器工作,警示驾驶员误踩驱动踏板动作。
[0025]
进一步地,所述制动输入反应感知模块包括制动输入侧向距离传感器、制动输入纵向距离传感器、反应感知温度传感器、坡度传感器、反应延迟状态信号灯和制动踏板位置传感器;所述制动输入反应感知模块与所述适用于分类的驾驶员制动意图自适应识别预测处理模块和所述双绕组电机主控制器进行通讯连接;所述制动输入反应状态感知公式判断驾驶员制动输入反应延迟状态:
[0026][0027]
式中,cd为一无量纲值,用以判断驾驶员制动输入反应延迟状态;
[0028]dh
为所述制动输入侧向距离传感器检测得到的制动输入侧向距离,单位为cm,d
h0
为标准状态下制动输入侧向距离,单位为cm;
[0029]
dv为所述制动输入纵向距离传感器检测得到的制动输入纵向距离,单位为cm,d
v0
为标准状态下制动输入纵向距离,单位为cm;
[0030]
t为所述反应感知温度传感器检测得到的座舱内部温度,单位为℃ t0为人体感知座舱最适宜内部温度,单位为℃;
[0031]
δ为所述坡度传感器检测得到的当前车辆行驶坡度;
[0032]
α1、α2、α3、α4为反应延迟状态权重因子,并可通过隐马尔可夫模型训练得到合适的值;
[0033]
所述驾驶员制动输入反应延迟cd值所处三种情况分别对应三种反应延迟状态:
[0034]
当cd≤c1时,所述反应延迟状态为紧凑型;
[0035]
当c1<cd≤c2时,所述反应延迟状态为正常型;
[0036]
当cd>c2时,所述反应延迟状态为舒缓型;
[0037]
所述反应延迟状态信号灯根据所述反应延迟状态显示不同颜色;当所述延迟状态为紧凑型时,所述反应延迟状态信号灯显示红色,提醒驾驶员减缓制动输入;当所述延迟状态为正常型时,所述反应延迟状态信号灯显示绿色,提醒驾驶员保持正常制动输入;当所述延迟状态为舒缓型时,所述反应延迟状态信号灯显示黄色,提醒驾驶员提速制动输入;
[0038]
所述制动踏板位置传感器采集驾驶员脚踩制动踏板时制动踏板旋转角度θ
pedal
信号,通过踏板行程转换公式x
pedal
=θ
pedal
·rp
计算得到踏板行程x
pedal
信号,进而计算得到踏板速度v
pedal
信号和踏板加速度a
pedal
信号,其中r
p
表示制动踏板旋转半径;所述踏板行程信号、踏板速度信号和踏板加速度信号传递给所述适用于分类的驾驶员制动意图自适应识别预测处理模块;所述踏板行程信号又同时传递给所述双绕组电机主控制器。
[0039]
进一步地,所述适用于分类的驾驶员制动意图自适应识别预测处理模块包括信号采集单元、信号滤波处理单元、特征参数选取单元、参数指标初次降维处理单元、自适应优化二次降维处理单元以及分类预测处理单元;所述适用于分类的驾驶员制动意图自适应识别预测处理模块与所述双绕组电机主控制器进行通讯连接;
[0040]
所述信号采集单元通过所述主缸压力传感器采集主缸第一腔压力p
mc1
,通过所述惯性导航系统采集本车速度v1、本车减速度a1、本车与前车之间相对距离s
rel
、本车与前车之
间相对速度v
rel
、本车与前车之间相对加速度a
rel
,并接收来自所述制动输入反应感知模块传递的信号;
[0041]
所述信号滤波处理单元对所述信号采集单元采集到的传感器信号进行卡尔曼滤波处理,得到随时间变化降低其波动趋势的测量值;
[0042]
所述特征参数选取单元对所述信号滤波处理单元得到的信号进行数据特征提取处理,得到表征驾驶员制动特征行为数据的21个相关参数:本车主缸压力平均值p
mc1_ave
、主缸压力均方差p
mc1_σ
、主缸压力最大值p
mc1_max
、主缸压力变化率平均值主缸压力变化率均方差主缸压力变化率最大值本车速度平均值v
1_ave
、本车速度均方差v
1_σ
、本车速度最大值v
1_max
、本车与前车之间相对距离平均值s
rel_ave
、本车与前车之间相对速度平均值v
rel_ave
、本车与前车之间相对加速度平均值a
rel_ave
、踏板行程平均值x
p_ave
、踏板行程均方差x
p_σ
、踏板行程最大值x
p_max
、踏板速度平均值v
p_ave
、踏板速度均方差v
p_σ
、踏板速度最大值v
p_max
、踏板加速度平均值a
p_ave
、踏板加速度均方差a
p_σ
、踏板加速度最大值a
p_max
;
[0043]
所述参数指标初次降维处理单元首先对所述特征参数选取单元表征驾驶员制动特征行为数据的全部参数归一化处理,寻找每一参数向量中最大值最小值,其中xi表示参数向量中第i个样本数据,n表示参数向量样本容量,得到处理后特征参数其中其中为参数向量中样本数据最小值,为参数向量中样本数据最大值,然后对得到的特征参数进行相关系数分析,得到以表征制动特征行为直接参数x
p_ave
、x
p_σ
、x
p_max
、v
p_ave
、v
p_σ
、v
p_max
、a
p_ave
、a
p_σ
、a
p_max
与间接关联参数p
mc1_ave
、p
mc1_σ
、p
mc1_max
、v
1_ave
、v
1_σ
、v
1_max
、s
rel_ave
、v
rel_ave
、a
rel_ave
之间线性相关程度制动系数其中表示处理后特征参数向量中第i个样本数据,表示处理后特征参数向量中第i个样本数据,根据的大小按照标准化区间[0,1]等间距递增分成制动极低相关、制动低度相关、制动中度相关、制动高度相关和制动极高相关五类相关程度,取直接参数和制动中度相关及以上的间接关联参数构成制动特征行为参数指标,以使得21个参数指标进行初次降维,得到初次降维参数其中表示初次降维后的第m个初次降维参数,并且m小于21;
[0044]
所述自适应优化二次降维处理单元以所述参数指标初次降维处理单元得到的m个初次降维参数指标数据作为输入,通过bp神经网络进行训练,利用遗传算法对bp神经网络的权值和阈值进行自适应优化,选择测试集数据误差平方和均方根值的倒数为适应度子函数其中和分别为测试集预测值和真实值,n
为测试集样本数目,表示测试集第i个样本预测数据,表示测试集第i个样本真实数据,筛选出二次降维输入参数指标组合
[0045]
所述分类预测处理单元将驾驶员助力制动模式下制动特征行为分为舒适型、一般型、运动型和紧急型四种模式,以所述自适应优化二次降维处理单元得到的二次降维输入参数指标组合作为特征参数变量,利用遗传算法优化训练后的特征参数变量数据集对bp神经网络模型进行分类预测,得到自适应识别预测分类器,判断驾驶员在助力制动模式下制动风格。
[0046]
进一步地,所述线控电液制动耦合系统模块包括输入推杆、双三相相移180
°
双绕组电机、减速传动机构、力耦合机构、输出推杆和制动主缸;
[0047]
所述输入推杆将所述制动输入反应感知模块产生的踏板行程通过输入推杆位移转换公式得到的输入推杆位移传递到所述力耦合机构:
[0048][0049]
式中,s
pedal_in
为输入推杆位移,单位为mm,i
p
为制动踏板到所述输入推杆位移杠杆比,x
pedal0
为制动踏板行程产生输入推杆位移的空行程,单位为mm;
[0050]
ζ1为第一转换系数修正因子,取值范围为[0.95,1.15];
[0051]
所述减速传动机构对所述双三相相移180
°
双绕组电机进行减速增扭,包括第一级传动机构、第二级传动机构和第三级传动机构,根据双绕组电机位角转换公式得到力耦合机构水平助力位移:
[0052][0053]
式中,x
doul_bo
为力耦合机构水平助力位移,单位为mm,θ
doul_bo
为双绕组电机角位移,单位为rad,i
total
为减速传动机构总传动比,k
doul_bo
为双绕组电机角位移转换系数;
[0054]
ζ2为第二转换系数修正因子,取值范围为[0.90,1.10];
[0055]
所述第一级传动机构为齿轮传动机构,其传动比为i
bo1
,将双绕组电机助力的旋转运动初次转化成大齿轮的旋转运动,所述第二级传动机构为齿轮传动结构,其传动比为i
bo2
,将所述第一级传动的大齿轮的旋转运动转化成所述第二级传动的大齿轮的旋转运动,所述第三级传动为滚珠丝杠传动机构,其传动比为i
bo3
,将所述第二级传动机构的大齿轮的旋转运动转化成所述第三级传动的丝杠轴的水平移动,所述减速传动机构总传动比i
total
由各传动比级联构成:i
total
=i
bo1
·ibo2
·ibo3
;
[0056]
所述力耦合机构用于将驾驶员助力制动模式下所述输入推杆位移和所述力耦合机构水平助力位移进行位移耦合,通过耦合作用力公式得到耦合作用力输出:
[0057][0058]
式中,f
coup
为所述力耦合机构耦合输出作用力,单位为n,k
coup1
为所述力耦合机构与所述输入推杆位移作用部分刚度,单位为n/mm,k
coup2
为所述力耦合机构与所述力耦合机构水平助力位移作用部分刚度,单位为n/mm;
[0059]acoup1
为所述力耦合机构与所述输入推杆位移接触作用部分面积,单位为mm2,a
coup2
为所述力耦合机构与所述力耦合机构水平助力位移接触作用部分面积,单位为mm2;
[0060]iact_doul
为所述双三相相移180
°
双绕组电机总电流,单位为a,k
conv
为所述双三相相移180
°
双绕组电机总电流比例系数,b
doul_bo
为驾驶员输入作用力偏移常量,单位为n,其中k
conv
和b
doul_bo
均由标定得来;
[0061]
ζ3为第三转换系数修正因子,取值范围为[0.92,1.12];
[0062]
所述输出推杆将所述力耦合机构耦合输出作用力传递输入给所述制动主缸;
[0063]
所述制动主缸将所述输出推杆耦合输出作用力转化为液压力,建立起制动系统所需压力,从而达到整车所期望的制动减速度。
[0064]
进一步地,所述双三相相移180
°
双绕组电机采用并联结构型双三相相移180
°
y型连接定子绕组表贴式永磁同步电机,电机两套绕组共用一个转子且偏置电角度为180
°
,包括双绕组电机定子槽、第一工作绕组、第二工作绕组、第一激励源、第二激励源、霍尔位置式传感器、第一绕组电流传感器、第二绕组电流传感器,并与所述双三相相移180
°
双绕组电机自检决策处理模块和所述双三相相移180
°
双绕组电机自动均流逼近控制模块进行通讯连接;
[0065]
所述双绕组电机定子槽结构为平底,以全齿绕分布排列嵌放定子槽绕组,每个齿上都绕制一个线圈;
[0066]
所述第一工作绕组和第二工作绕组分别为{a1,b1,c1}和{a2,b2,c2},其中a1、b1和c1分别表示第一工作绕组的a相、b相和c相,a2、b2和c2分别表示第二工作绕组的a相、b相和c相,其绕组各相之间互差120
°
电角度,第二工作绕组各相滞后第一工作绕组180
°
电角度;所述第一工作绕组和第二工作绕组隔离布置,逆时针顺序排列第一工作绕组和第二工作绕组各相绕组线圈分布,第一工作绕组置于第1,3象限,第二工作绕组置于第2,4象限;
[0067]
所述第一激励源与第二激励源分别包括第一电流源和第一逆变器与第二电流源和第二逆变器,所述第一电流源和第二电流源各相互差120
°
电角度,第二电流源各相滞后第一电流源对应相180
°
,第一电流源a相初始相位角为0
°
;第一逆变器和第二逆变器采用igbt晶体管控制通断;所述第一电流源和第二电流源可根据电流组合激发公式得到输出激励电流:
[0068][0069]
式中,i
moti
表示绕组激励电流,单位为a,i
a1
、i
b1
和i
c1
分别表示第一工作绕组a相、b相和c相的激励电流,单位为a,i
a2
、i
b2
和i
c2
分别表示第二工作绕组a相、b相和c相的激励电流,单位为a;
[0070]imax
表示电流激励源幅值,ω表示电流激励源圆频率;
[0071]
所述霍尔位置式传感器采集双三相相移180
°
双绕组电机实际旋转角度信号,并计算得到双绕组电机实际旋转角速度信号;
[0072]
所述第一绕组电流传感器和第二绕组电流传感器分别采集第一工作绕组实际电流和第二工作绕组实际电流信号。
[0073]
进一步地,所述双三相相移180
°
双绕组电机自检决策处理模块包括电机信号预测单元、绕组电流诊断单元、电机转角诊断单元、故障模式判断单元;所述双三相相移180
°
双绕组电机自检决策处理模块与所述双绕组电机主控制器进行通讯连接;
[0074]
所述电机信号预测单元采用长短时记忆网络模型算法,对所述双三相相移180
°
双绕组电机工作时前8个周期所述电流传感器和所述霍尔位置式传感器采集到的第一工作绕组实际电流、第二工作绕组实际电流和双三相相移180
°
双绕组电机实际旋转角度数据进行筛选,将筛选结果作为训练集来预测下一周期第一工作绕组电流、第二工作绕组电流和双三相相移180
°
双绕组电机旋转角度;
[0075]
所述绕组电流诊断单元对预测下一周期得到的第一工作绕组电流i
pre1
和第二工作绕组电流i
pre2
与第一工作绕组实际电流i
act1
和第二工作绕组实际电流i
act2
之差分别设置电流差阈值i
err1
和i
err2
,即:|i
acti-i
prei
|≤i
erri
(i=1,2);
[0076]
所述电机转角诊断单元对预测下一周期得到的双三相相移180
°
双绕组电机旋转角度θ
pre
与双三相相移180
°
双绕组电机实际旋转角度θ
act
之差设置转角差阈值θ
err
,即:|θ
act-θ
pre
|≤θ
err
;
[0077]
所述故障模式判断单元对所述绕组电流诊断单元和所述电机转角诊断单元得到的结果进行判断,当未超过电流差阈值i
err1
和i
err2
与转角差阈值θ
err
时,则判定所述双三相相移180
°
双绕组电机处于正常工作模式;当超过电流差阈值i
err1
或i
err2
时,则判定超电流差阈值的绕组所在电路发生故障,判定未超电流差阈值所在绕组单独工作,处于单绕组故障模式;当超过电流差阈值i
err1
和i
err2
或转角差阈值θ
err
时,则判定系统处于全绕组故障模式。
[0078]
进一步地,所述双三相相移180
°
双绕组电机自动均流逼近控制模块根据所述双三相相移180
°
双绕组电机自检决策处理模块判别的故障模式进行控制,包括位置调节器、转速调节器、自动均流逼近电流调节器和功率驱动模块;
[0079]
当所述双三相相移180
°
双绕组电机处于正常工作模式时,其第一工作绕组和第二工作绕组同时工作;
[0080]
所述位置调节器以所述双三相相移180
°
双绕组电机期望旋转角度θ
ref
为输入信号,以所述双绕组电机实际旋转角度θ
act
作为反馈,采用基于粒子群算法优化的比例积分pi控制,得到电机期望旋转角速度ω
ref
;
[0081]
所述转速调节器以电机期望旋转角速度ω
ref
为输入信号,以所述电机实际旋转角速度作为反馈,采用模糊自适应整定pid控制,得到电机期望总电流i
ref
;
[0082]
所述自动均流逼近电流调节器比较所述第一工作绕组实际电流i
act1
与第二工作绕组实际电流i
act2
大小,以电流较大对应的绕组电流max{i
act1
,i
act2
}分别与两绕组实际电流作差比较得到第一工作绕组控制电流i
ref1_contr
和第二工作绕组控制电流i
ref2_contr
,以i
ref
/2作为第一工作绕组和第二工作绕组的期望电流输入,以第一工作绕组控制电流i
ref1_contr
和第二工作绕组控制电流i
ref2_contr
作为对应绕组的反馈信号,利用第一电流调节器和第二电流调节器分别得到第一工作绕组期望电压和第二工作绕组期望电压;
[0083]
所述功率驱动模块将第一工作绕组和第二工作绕组得到的期望电压信号分别经过脉宽调制控制算法得到第一工作绕组和第二工作绕组的脉宽调制占空比信号pwm
a1b1c1
、pwm
a2b2c2
,分别驱动所述第一逆变器和所述第二逆变器,所述第一逆变器和所述第二逆变器驱动所述双三相相移180
°
双绕组电机工作;
[0084]
当所述双三相相移180
°
双绕组电机处于单绕组故障模式时,控制工作绕组电流转变为原来的两倍,单独驱动所述双三相相移180
°
双绕组电机工作,保证电机工作带载能力不变,实现制动冗余安全功能。
[0085]
进一步地,所述路况监督模块包括前监测器、左监测器、右监测器和后监测器,监测车辆周围工况,并根据所述主动制动需求检测公式辅助驾驶员在未踩制动踏板时对车辆需制动情况下主动制动模式需求的判别,所述路况监督模块与所述双绕组电机主控制器进行通讯连接;
[0086]
所述前监测器监测前方车辆和行人的运动状态、前方车道线轨迹及其偏离程度,通过内置算法对采集到的前视信息进行处理,得到车辆第一主动制动模式需求π1,取值为1或0,1表示第一主动制动模式需求触发,0表示第一主动制动模式需求关闭;
[0087]
所述左监测器监测左侧车辆和行人的运动状态以及车轮周围的物体,避免发生碰撞、意外陷车或侧翻,通过内置算法对采集到的左视信息进行处理,得到车辆第二主动制动模式需求π2,取值为1或0,1表示第二主动制动模式需求触发,0表示第二主动制动模式需求关闭;
[0088]
所述右监测器监测右侧车辆和行人的运动状态以及车轮周围的物体,避免发生碰撞、意外陷车或侧翻,通过内置算法对采集到的右视信息进行处理,得到车辆第三主动制动模式需求π3,取值为1或0,1表示第三主动制动模式需求触发,0表示第三主动制动模式需求关闭;
[0089]
所述后监测器监测后方车辆的运动状态,避免主动制动时后方车辆追尾,通过内置算法对采集到的后视信息进行处理,得到车辆第四主动制动模式需求π4,取值为1或0,1表示第四主动制动模式需求关闭,0表示第四主动制动模式需求触发;所述主动制动模式需求根据所述主动制动需求检测公式进行判断:
[0090]
z=(λ1·
π1+λ2·
π2+λ3·
π3)
·
π4[0091]
λ1+λ2+λ3=1
[0092]
式中,z表示车辆主动制动模式判别数,λ1为所述前监测器监测信息权重,λ2为所述左监测器监测信息权重,λ3为所述右监测器监测信息权重;
[0093]
当z
edg
≤z≤1时,则判断车辆主动制动模式需求触发,z
edg
为车辆主动制动模式判别数下限值;
[0094]
当0≤z≤z
edg
时,则判断车辆主动制动模式需求关闭,车辆采用助力制动模式。
[0095]
进一步地,所述双绕组电机主控制器接收所述制动输入反应感知模块、适用于分类的驾驶员制动意图自适应识别预测处理模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块和路况监督模块的信号,对驾驶员助力制动模式和主动制动模式下控制所述双三相相移180
°
双绕组电机执行;
[0096]
当所述路况监督模块对车辆制动判定为驾驶员助力制动模式且双三相相移180
°
双绕组电机自检决策处理模块对故障模式判定为非全绕组故障时,双绕组电机主控制器根据适用于分类的驾驶员制动意图自适应识别预测处理模块得到的制动风格,设置相应制动风格对应的助力特性曲线,以制动输入反应感知模块得到的踏板行程信号作为输入,控制所述双三相相移180
°
双绕组电机工作产生期望的电机转角以进行助力,车辆进行制动时所需制动力由驾驶员制动踏板输入力和双绕组电机助力产生;
[0097]
当所述路况监督模块对车辆制动判定为主动制动模式且双三相相移180
°
双绕组电机自检决策处理模块对故障模式判定为非全绕组故障时,双绕组电机主控制器根据期望所需制动力控制所述双三相相移180
°
双绕组电机执行产生相应作用力,车辆进行制动时所需制动力单独由双绕组电机产生;
[0098]
所述双绕组电机主控制器对双三相相移180
°
双绕组电机自检决策处理模块结果进行处理,控制所述双三相相移180
°
双绕组电机绕组的正常工作和切断中止。
[0099]
与现有技术相比,本发明的有益效果:
[0100]
1.本发明采用了多模块的控制系统,从多方面、多维度去保证制动系统的安全性,各模块之间紧密联系,能够及时、有效地去辅助驾驶员进行制动操作行为;
[0101]
2.本发明对驾驶员操作行为进行监测,包括对驾驶员误踩驱动踏板行为和制动输入行为进行监测,警示驾驶员误踩行为以及判断驾驶员制动输入反应延迟状态,调整驾驶员制动输入行为;
[0102]
3.本发明在线控制动系统中融合双绕组电机在发生单绕组故障时安全工作的优势,具备制动系统部件电机绕组冗余安全功能,提高了制动系统的可靠性,增强了车辆在行驶过程中的安全性;
[0103]
4.本发明通过对路况进行实时监督,以辅助驾驶员进行车辆主动制动,并通过双绕组电机单独工作来实现。
附图说明
[0104]
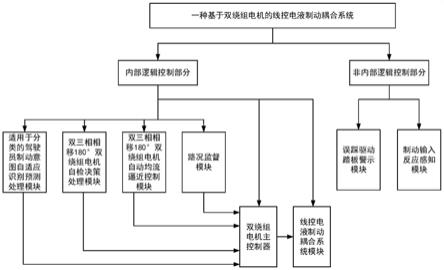
图1是本发明一种基于双绕组电机的线控电液制动耦合系统组成示意图;
[0105]
图2是本发明驾驶员操作行为监测判断工作流程图;
[0106]
图3是本发明双三相相移180
°
双绕组电机自动均流逼近控制组成示意图;
具体实施方式
[0107]
下面结合附图对本发明的具体实施方式做详细的描述。
[0108]
参阅图1,本发明的一种基于双绕组电机的线控电液制动耦合系统,包括误踩驱动踏板警示模块、制动输入反应感知模块、适用于分类的驾驶员制动意图自适应识别预测处理模块、线控电液制动耦合系统模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块、路况监督模块和双绕组电机主控制器。其中,双绕组电机主控制器,分别与双绕组电机主控制器相连的适用于分类的驾驶员制动意图自适应识别预测处理模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块和路况监督模块以及线控电液制动耦合系统模块为内部逻辑控制部分;误踩驱动踏板警示模块和制动输入反应感知模块为非内部逻辑控制部分。
[0109]
所述误踩驱动踏板警示模块,其通过检测驱动踏板加速度和驱动踏板力,利用模糊语言控制器,识别驾驶员误踩驱动踏板概率,当误踩驱动踏板概率大于0.8时,触发座椅靠背推打警示控制器开关,警示驾驶员误踩行为。所述制动输入反应感知模块,其通过采集制动输入侧向距离、制动输入纵向距离、座舱内部温度以及行驶坡度信号,并利用制动输入反应状态感知公式判断驾驶员制动输入反应延迟状态,调整驾驶员制动输入行为。所述适
用于分类的驾驶员制动意图自适应识别预测处理模块用于对主缸压力传感器、惯性导航系统和所述制动踏板位置传感器采集的信号进行处理,判断驾驶员在助力制动模式下的制动风格,包括信号采集单元、信号滤波处理单元、特征参数选取单元、参数指标初次降维处理单元、自适应优化二次降维处理单元以及分类预测处理单元。所述线控电液制动耦合系统模块包括输入推杆、双三相相移180
°
双绕组电机、减速传动机构、力耦合机构、输出推杆和制动主缸,其双三相相移180
°
双绕组电机又包括相位互差180
°
电角度的第一工作绕组和第二工作绕组、相位互差180
°
电角度的第一激励源和第二激励源、霍尔位置式传感器、第一绕组电流传感器、第二绕组电流传感器,用于将驾驶员制动输入力和双绕组电机助力进行耦合作用输出,从而推动制动主缸,产生车辆制动时所需减速度。所述双三相相移180
°
双绕组电机自检决策处理模块,其通过故障检测逻辑处理判断所述双三相相移180
°
双绕组电机的故障模式,分为正常工作模式、单绕组故障模式和全绕组故障模式。所述双三相相移180
°
双绕组电机自动均流逼近控制模块对所述双三相相移180
°
双绕组电机故障模式进行控制,正常工作模式下对绕组电流进行自动均流设置,单绕组故障模式下让正常绕组以保证电机带载能力不变前提下单独工作以实现制动冗余。所述路况监督模块包括前监测器、左监测器、右监测器和后监测器,监测车辆周围工况,利用主动制动需求检测公式辅助驾驶员在未踩制动踏板时对车辆需制动情况下主动制动模式需求进行判断。所述双绕组电机主控制器接收所述适用于分类的驾驶员制动意图自适应识别预测处理模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块和路况监督模块的信号,对驾驶员助力制动模式和主动制动模式下控制所述双三相相移180
°
双绕组电机执行以及在单绕组故障模式和全绕组故障模式下发出切断电源指令。
[0110]
所述适用于分类的驾驶员制动意图自适应识别预测处理模块包括信号采集单元、信号滤波处理单元、特征参数选取单元、参数指标初次降维处理单元、自适应优化二次降维处理单元以及分类预测处理单元;所述适用于分类的驾驶员制动意图自适应识别预测处理模块与所述双绕组电机主控制器进行通讯连接;
[0111]
所述信号采集单元通过所述主缸压力传感器采集主缸第一腔压力p
mc1
,通过所述惯性导航系统采集本车速度v1、本车减速度a1、本车与前车之间相对距离s
rel
、本车与前车之间相对速度v
rel
、本车与前车之间相对加速度a
rel
,并接收来自所述制动输入反应感知模块传递的信号;
[0112]
所述信号滤波处理单元对所述信号采集单元采集到的传感器信号进行卡尔曼滤波处理,得到随时间变化降低其波动趋势的测量值;
[0113]
所述特征参数选取单元对所述信号滤波处理单元得到的信号进行数据特征提取处理,得到表征驾驶员制动特征行为数据的21个相关参数:本车主缸压力平均值p
mc1_ave
、主缸压力均方差p
mc1_σ
、主缸压力最大值p
mc1_max
、主缸压力变化率平均值主缸压力变化率均方差主缸压力变化率最大值本车速度平均值v
1_ave
、本车速度均方差v
1_σ
、本车速度最大值v
1_max
、本车与前车之间相对距离平均值s
rel_ave
、本车与前车之间相对速度平均值v
rel_ave
、本车与前车之间相对加速度平均值a
rel_ave
、踏板行程平均值x
p_ave
、踏板行程均方差x
p_σ
、踏板行程最大值x
p_max
、踏板速度平均值v
p_ave
、踏板速度均方差v
p_σ
、踏板
速度最大值v
p_max
、踏板加速度平均值a
p_ave
、踏板加速度均方差a
p_σ
、踏板加速度最大值a
p_max
;
[0114]
所述参数指标初次降维处理单元首先对所述特征参数选取单元表征驾驶员制动特征行为数据的全部参数归一化处理,寻找每一参数向量中最大值最小值,其中xi表示参数向量中第i个样本数据,n表示参数向量样本容量,得到处理后特征参数其中其中为参数向量中样本数据最小值,为参数向量中样本数据最大值,然后对得到的特征参数进行相关系数分析,得到以表征制动特征行为直接参数x
p_ave
、x
p_σ
、x
p_max
、v
p_ave
、v
p_σ
、v
p_max
、a
p_ave
、a
p_σ
、a
p_max
与间接关联参数p
mc1_ave
、p
mc1_σ
、p
mc1_max
、v
1_ave
、v
1_σ
、v
1_max
、s
rel_ave
、v
rel_ave
、a
rel_ave
之间线性相关程度制动系数其中表示处理后特征参数向量中第i个样本数据,表示处理后特征参数向量中第i个样本数据,根据的大小按照标准化区间[0,1]等间距递增分成制动极低相关、制动低度相关、制动中度相关、制动高度相关和制动极高相关五类相关程度,取直接参数和制动中度相关及以上的间接关联参数构成制动特征行为参数指标,以使得21个参数指标进行初次降维,得到初次降维参数其中表示初次降维后的第m个初次降维参数,并且m小于21;
[0115]
所述自适应优化二次降维处理单元以所述参数指标初次降维处理单元得到的m个初次降维参数指标数据作为输入,通过bp神经网络进行训练,利用遗传算法对bp神经网络的权值和阈值进行自适应优化,选择测试集数据误差平方和均方根值的倒数为适应度子函数其中和分别为测试集预测值和真实值,n为测试集样本数目,表示测试集第i个样本预测数据,表示测试集第i个样本真实数据,筛选出二次降维输入参数指标组合
[0116]
所述分类预测处理单元将驾驶员助力制动模式下制动特征行为分为舒适型、一般型、运动型和紧急型四种模式,以所述自适应优化二次降维处理单元得到的二次降维输入参数指标组合作为特征参数变量,利用遗传算法优化训练后的特征参数变量数据集对bp神经网络模型进行分类预测,得到自适应识别预测分类器,判断驾驶员在助力制动模式下制动风格。
[0117]
所述线控电液制动耦合系统模块包括输入推杆、双三相相移180
°
双绕组电机、减速传动机构、力耦合机构、输出推杆和制动主缸;
[0118]
所述输入推杆将所述制动输入反应感知模块产生的踏板行程通过输入推杆位移转换公式得到的输入推杆位移传递到所述力耦合机构:
[0119]
[0120]
式中,s
pedal_in
为输入推杆位移,单位为mm,i
p
为制动踏板到所述输入推杆位移杠杆比,x
pedal0
为制动踏板行程产生输入推杆位移的空行程,单位为mm;
[0121]
ζ1为第一转换系数修正因子,取值范围为[0.95,1.15];
[0122]
所述减速传动机构对所述双三相相移180
°
双绕组电机进行减速增扭,包括第一级传动机构、第二级传动机构和第三级传动机构,根据双绕组电机位角转换公式得到力耦合机构水平助力位移:
[0123][0124]
式中,x
doul_bo
为力耦合机构水平助力位移,单位为mm,θ
doul_bo
为双绕组电机角位移,单位为rad,i
total
为减速传动机构总传动比,k
doul_bo
为双绕组电机角位移转换系数;
[0125]
ζ2为第二转换系数修正因子,取值范围为[0.90,1.10];
[0126]
所述力耦合机构用于将驾驶员助力制动模式下所述输入推杆位移和所述力耦合机构水平助力位移进行位移耦合,通过耦合作用力公式得到耦合作用力输出:
[0127][0128]
式中,f
coup
为所述力耦合机构耦合输出作用力,单位为n,k
coup1
为所述力耦合机构与所述输入推杆位移作用部分刚度,单位为n/mm,k
coup2
为所述力耦合机构与所述力耦合机构水平助力位移作用部分刚度,单位为n/mm;
[0129]acoup1
为所述力耦合机构与所述输入推杆位移接触作用部分面积,单位为mm2,a
coup2
为所述力耦合机构与所述力耦合机构水平助力位移接触作用部分面积,单位为mm2;
[0130]iact_doul
为所述双三相相移180
°
双绕组电机总电流,单位为a,k
conv
为所述双三相相移180
°
双绕组电机总电流比例系数,b
doul_bo
为驾驶员输入作用力偏移常量,单位为n,其中k
conv
和b
doul_bo
均由标定得来;
[0131]
ζ3为第三转换系数修正因子,取值范围为[0.92,1.12];
[0132]
所述输出推杆将所述力耦合机构耦合输出作用力传递输入给所述制动主缸;
[0133]
所述制动主缸将所述输出推杆耦合输出作用力转化为液压力,建立起制动系统所需压力,从而达到整车所期望的制动减速度。
[0134]
所述双三相相移180
°
双绕组电机采用并联结构型双三相相移180
°
y型连接定子绕组表贴式永磁同步电机,电机两套绕组共用一个转子且偏置电角度为180
°
,包括双绕组电机定子槽、第一工作绕组、第二工作绕组、第一激励源、第二激励源、霍尔位置式传感器、第一绕组电流传感器、第二绕组电流传感器,并与所述双三相相移180
°
双绕组电机自检决策处理模块和所述双三相相移180
°
双绕组电机自动均流逼近控制模块进行通讯连接;
[0135]
所述双绕组电机定子槽结构为平底,以全齿绕分布排列嵌放定子槽绕组,每个齿上都绕制一个线圈;
[0136]
所述第一工作绕组和第二工作绕组分别为{a1,b1,c1}和{a2,b2,c2},其中a1、b1和c1分别表示第一工作绕组的a相、b相和c相,a2、b2和c2分别表示第二工作绕组的a相、b相和c相,其绕组各相之间互差120
°
电角度,第二工作绕组各相滞后第一工作绕组180
°
电角度;
[0137]
所述第一激励源与第二激励源分别包括第一电流源和第一逆变器与第二电流源和第二逆变器,所述第一电流源和第二电流源各相互差120
°
电角度,第二电流源各相滞后
第一电流源对应相180
°
,第一电流源a相初始相位角为0
°
;第一逆变器和第二逆变器采用igbt晶体管控制通断;所述第一电流源和第二电流源可根据电流组合激发公式得到输出激励电流:
[0138][0139]
式中,i
moti
表示绕组激励电流,单位为a,i
a1
、i
b1
和i
c1
分别表示第一工作绕组a相、b相和c相的激励电流,单位为a,i
a2
、i
b2
和i
c2
分别表示第二工作绕组a相、b相和c相的激励电流,单位为a;
[0140]imax
表示电流激励源幅值,ω表示电流激励源圆频率;
[0141]
所述霍尔位置式传感器采集双三相相移180
°
双绕组电机实际旋转角度信号,并计算得到双绕组电机实际旋转角速度信号;
[0142]
所述第一绕组电流传感器和第二绕组电流传感器分别采集第一工作绕组实际电流和第二工作绕组实际电流信号。
[0143]
所述双三相相移180
°
双绕组电机自检决策处理模块包括电机信号预测单元、绕组电流诊断单元、电机转角诊断单元、故障模式判断单元;所述双三相相移180
°
双绕组电机自检决策处理模块与所述双绕组电机主控制器进行通讯连接;
[0144]
所述电机信号预测单元采用长短时记忆网络模型算法,对所述双三相相移180
°
双绕组电机工作时前8个周期所述电流传感器和所述霍尔位置式传感器采集到的第一工作绕组实际电流、第二工作绕组实际电流和双三相相移180
°
双绕组电机实际旋转角度数据进行筛选,将筛选结果作为训练集来预测下一周期第一工作绕组电流、第二工作绕组电流和双三相相移180
°
双绕组电机旋转角度;
[0145]
所述绕组电流诊断单元对预测下一周期得到的第一工作绕组电流i
pre1
和第二工作绕组电流i
pre2
与第一工作绕组实际电流i
act1
和第二工作绕组实际电流i
act2
之差分别设置电流差阈值i
err1
和i
err2
,即:|i
acti-i
prei
|≤i
erri
(i=1,2);
[0146]
所述电机转角诊断单元对预测下一周期得到的双三相相移180
°
双绕组电机旋转角度θ
pre
与双三相相移180
°
双绕组电机实际旋转角度θ
act
之差设置转角差阈值θ
err
,即:|θ
act-θ
pre
|≤θ
err
;
[0147]
所述故障模式判断单元对所述绕组电流诊断单元和所述电机转角诊断单元得到的结果进行判断,当未超过电流差阈值i
err1
和i
err2
与转角差阈值θ
err
时,则判定所述双三相相移180
°
双绕组电机处于正常工作模式;当超过电流差阈值i
err1
或i
err2
时,则判定超电流差阈值的绕组所在电路发生故障,判定未超电流差阈值所在绕组单独工作,处于单绕组故障模式;当超过电流差阈值i
err1
和i
err2
或转角差阈值θ
err
时,则判定系统处于全绕组故障模式。
[0148]
所述路况监督模块包括前监测器、左监测器、右监测器和后监测器,监测车辆周围工况,并根据所述主动制动需求检测公式辅助驾驶员在未踩制动踏板时对车辆需制动情况下主动制动模式需求的判别,所述路况监督模块与所述双绕组电机主控制器进行通讯连
接;
[0149]
所述前监测器监测前方车辆和行人的运动状态、前方车道线轨迹及其偏离程度,通过内置算法对采集到的前视信息进行处理,得到车辆第一主动制动模式需求π1,取值为1或0,1表示第一主动制动模式需求触发,0表示第一主动制动模式需求关闭;
[0150]
所述左监测器监测左侧车辆和行人的运动状态以及车轮周围的物体,避免发生碰撞、意外陷车或侧翻,通过内置算法对采集到的左视信息进行处理,得到车辆第二主动制动模式需求π2,取值为1或0,1表示第二主动制动模式需求触发,0表示第二主动制动模式需求关闭;
[0151]
所述右监测器监测右侧车辆和行人的运动状态以及车轮周围的物体,避免发生碰撞、意外陷车或侧翻,通过内置算法对采集到的右视信息进行处理,得到车辆第三主动制动模式需求π3,取值为1或0,1表示第三主动制动模式需求触发,0表示第三主动制动模式需求关闭;
[0152]
所述后监测器监测后方车辆的运动状态,避免主动制动时后方车辆追尾,通过内置算法对采集到的后视信息进行处理,得到车辆第四主动制动模式需求π4,取值为1或0,1表示第四主动制动模式需求关闭,0表示第四主动制动模式需求触发;
[0153]
所述主动制动模式需求根据所述主动制动需求检测公式进行判断:
[0154]
z=(λ1·
π1+λ2·
π2+λ3·
π3)
·
π4[0155]
λ1+λ2+λ3=1
[0156]
式中,z表示车辆主动制动模式判别数,λ1为所述前监测器监测信息权重,λ2为所述左监测器监测信息权重,λ3为所述右监测器监测信息权重;
[0157]
当z
edg
≤z≤1时,则判断车辆主动制动模式需求触发,z
edg
为车辆主动制动模式判别数下限值;
[0158]
当0≤z≤z
edg
时,则判断车辆主动制动模式需求关闭,车辆采用助力制动模式。
[0159]
所述双绕组电机主控制器接收所述制动输入反应感知模块、适用于分类的驾驶员制动意图自适应识别预测处理模块、双三相相移180
°
双绕组电机自检决策处理模块、双三相相移180
°
双绕组电机自动均流逼近控制模块和路况监督模块的信号,对驾驶员助力制动模式和主动制动模式下控制所述双三相相移180
°
双绕组电机执行;
[0160]
当所述路况监督模块对车辆制动判定为驾驶员助力制动模式且双三相相移180
°
双绕组电机自检决策处理模块对故障模式判定为非全绕组故障时,双绕组电机主控制器根据适用于分类的驾驶员制动意图自适应识别预测处理模块得到的制动风格,设置相应制动风格对应的助力特性曲线,以制动输入反应感知模块得到的踏板行程信号作为输入,控制所述双三相相移180
°
双绕组电机工作产生期望的电机转角以进行助力,车辆进行制动时所需制动力由驾驶员制动踏板输入力和双绕组电机助力产生;
[0161]
当所述路况监督模块对车辆制动判定为主动制动模式且双三相相移180
°
双绕组电机自检决策处理模块对故障模式判定为非全绕组故障时,双绕组电机主控制器根据期望所需制动力控制所述双三相相移180
°
双绕组电机执行产生相应作用力,车辆进行制动时所需制动力单独由双绕组电机产生;
[0162]
所述双绕组电机主控制器对双三相相移180
°
双绕组电机自检决策处理模块结果进行处理,控制所述双三相相移180
°
双绕组电机绕组的正常工作和切断中止。
[0163]
参阅图2,本发明驾驶员操作行为监测判断包括误踩驱动踏板警示模块和制动输入反应感知模块;
[0164]
所述误踩驱动踏板警示模块包括驱动踏板加速度传感器、驱动踏板压力传感器、模糊语言控制器和座椅靠背推打警示控制器;所述驱动踏板加速度传感器和驱动踏板压力传感器分别检测驾驶员误踩驱动踏板产生的驱动踏板加速度和驱动踏板力;
[0165]
所述模糊语言控制器输入模糊集为当前驱动踏板加速度和驱动踏板力,其模糊子集定义为a
dri
={vsa,sa,ma,la,vla},即{非常小,较小,中等,较大,非常大},取值范围定义为[0,30],f
dri
={vsf,sf,mf,lf,vlf},即{非常小,较小,中等,较大,非常大},取值范围定义为[0,450],输出模糊集为驾驶员误踩驱动踏板概率,其模糊子集定义为p
mis
={vsp,sp,mp,lp,vlp},即{很小,较小,中等,较大,很大},取值范围定义为[0,100];其中a
dri
为驱动踏板加速度,单位为m/s2,f
dri
为驱动踏板力,单位为n,p
mis
为驾驶员误踩驱动踏板概率;
[0166]
模糊逻辑控制规则为:
[0167][0168]
选取输入模糊集和输出模糊集隶属函数:
[0169][0170]
[0171][0172]
式中,为驱动踏板加速度控制量变化,为驱动踏板力控制量变化,为误踩驱动踏板概率控制量变化;
[0173]
所述座椅靠背推打警示控制器置于座椅靠背内侧中间位置,可通过其内部机构对驾驶员后背以180赫兹频率推打;当所述模糊语言控制器模糊推理误踩驱动踏板概率结果大于0.8时,所述座椅靠背推打警示控制器工作,警示驾驶员误踩驱动踏板动作。
[0174]
所述制动输入反应感知模块包括制动输入侧向距离传感器、制动输入纵向距离传感器、反应感知温度传感器、坡度传感器、反应延迟状态信号灯和制动踏板位置传感器;所述制动输入反应状态感知公式判断驾驶员制动输入反应延迟状态:
[0175][0176]
式中,cd为一无量纲值,用以判断驾驶员制动输入反应延迟状态;
[0177]dh
为所述制动输入侧向距离传感器检测得到的制动输入侧向距离,单位为cm,d
h0
为标准状态下制动输入侧向距离,单位为cm;
[0178]
dv为所述制动输入纵向距离传感器检测得到的制动输入纵向距离,单位为cm,d
v0
为标准状态下制动输入纵向距离,单位为cm;
[0179]
t为所述反应感知温度传感器检测得到的座舱内部温度,单位为℃,t0为人体感知座舱最适宜内部温度,单位为℃;
[0180]
δ为所述坡度传感器检测得到的当前车辆行驶坡度;
[0181]
α1、α2、α3、α4为反应延迟状态权重因子,并可通过隐马尔可夫模型训练得到合适的值;
[0182]
所述驾驶员制动输入反应延迟cd值所处三种情况分别对应三种反应延迟状态:
[0183]
当cd≤c1时,所述反应延迟状态为紧凑型;
[0184]
当c1<cd≤c2时,所述反应延迟状态为正常型;
[0185]
当cd>c2时,所述反应延迟状态为舒缓型;
[0186]
所述反应延迟状态信号灯根据所述反应延迟状态显示不同颜色;当所述延迟状态为紧凑型时,所述反应延迟状态信号灯显示红色,提醒驾驶员减缓制动输入;当所述延迟状态为正常型时,所述反应延迟状态信号灯显示绿色,提醒驾驶员保持正常制动输入;当所述延迟状态为舒缓型时,所述反应延迟状态信号灯显示黄色,提醒驾驶员提速制动输入;
[0187]
所述制动踏板位置传感器采集驾驶员脚踩制动踏板时制动踏板旋转角度θ
pedal
信号,通过踏板行程转换公式x
pedal
=θ
pedal
·rp
计算得到踏板行程x
pedal
信号,进而计算得到踏板速度v
pedal
信号和踏板加速度a
pedal
信号,其中r
p
表示制动踏板旋转半径;所述踏板行程信
号、踏板速度信号和踏板加速度信号传递给所述适用于分类的驾驶员制动意图自适应识别预测处理模块;所述踏板行程信号又同时传递给所述双绕组电机主控制器。
[0188]
参阅图3,所述双三相相移180
°
双绕组电机自动均流逼近控制模块根据所述双三相相移180
°
双绕组电机自检决策处理模块判别的故障模式进行控制,包括位置调节器、转速调节器、自动均流逼近电流调节器和功率驱动模块;
[0189]
当所述双三相相移180
°
双绕组电机处于正常工作模式时,其第一工作绕组和第二工作绕组同时工作;
[0190]
所述位置调节器以所述双三相相移180
°
双绕组电机期望旋转角度θ
ref
为输入信号,以所述双绕组电机实际旋转角度θ
act
作为反馈,采用基于粒子群算法优化的比例积分pi控制,得到电机期望旋转角速度ω
ref
;
[0191]
所述转速调节器以电机期望旋转角速度ω
ref
为输入信号,以所述电机实际旋转角速度作为反馈,采用模糊自适应整定pid控制,得到电机期望总电流i
ref
;
[0192]
所述自动均流逼近电流调节器比较所述第一工作绕组实际电流i
act1
与第二工作绕组实际电流i
act2
大小,以电流较大对应的绕组电流max{i
act1
,i
act2
}分别与两绕组实际电流作差比较得到第一工作绕组控制电流i
ref1_contr
和第二工作绕组控制电流i
ref2_contr
,以i
ref
/2作为第一工作绕组和第二工作绕组的期望电流输入,以第一工作绕组控制电流i
ref1_contr
和第二工作绕组控制电流i
ref2_contr
作为对应绕组的反馈信号,利用第一电流调节器和第二电流调节器分别得到第一工作绕组期望电压和第二工作绕组期望电压;
[0193]
所述功率驱动模块将第一工作绕组和第二工作绕组得到的期望电压信号分别经过脉宽调制控制算法得到第一工作绕组和第二工作绕组的脉宽调制占空比信号pwm
a1b1c1
、pwm
a2b2c2
,分别驱动所述第一逆变器和所述第二逆变器,所述第一逆变器和所述第二逆变器驱动所述双三相相移180
°
双绕组电机工作;
[0194]
当所述双三相相移180
°
双绕组电机处于单绕组故障模式时,控制工作绕组电流转变为原来的两倍,单独驱动所述双三相相移180
°
双绕组电机工作,保证电机工作带载能力不变,实现制动冗余安全功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1