车辆控制系统的制作方法
1.本公开涉及车辆控制系统。
背景技术:
2.在日本特开2017-114195中公开了一种与在进行碰撞避免控制的情况下能避免产生行驶控制的干扰的车辆控制装置相关的技术。该技术的车辆控制装置执行避免车辆与障碍物的碰撞的第一控制(碰撞避免控制)。而且,车辆控制装置执行巡航控制、车道维持控制这样的第二控制。车辆控制装置识别车辆的周围的障碍物,并基于其识别结果来判定规定的碰撞避免条件是否已成立。在第二控制的执行中判定为碰撞避免条件已成立的情况下,车辆控制装置停止第二控制并执行第一控制。
3.在此,考虑在车辆的自动驾驶的过程中执行预先判断车辆的周围的驾驶环境并进行对车辆行驶控制的控制量的干预的行驶辅助控制的情况。在自动驾驶的过程中,由管理自动驾驶的自动驾驶控制装置生成目标轨迹。然后,由车辆行驶控制装置以车辆追随用于自动驾驶的目标轨迹的方式执行车辆行驶控制。
4.然而,从车辆安全性的观点考虑,由自动驾驶控制装置生成的用于自动驾驶的目标轨迹有时不一定是恰当的。例如,可能会生成需要急剧的车道变更、先行车辆的超越这样的目标轨迹。在以追随这样的不恰当的目标轨迹的方式执行了车辆行驶控制的情况下,恐怕会频繁地执行进行对车辆行驶控制的控制量的干预的行驶辅助控制。若行驶辅助控制的干预频度高,则车辆的乘坐者、周围的人恐怕会感到不适感、不安感。
技术实现要素:
5.本公开提供一种能降低由车辆行驶控制装置进行的行驶辅助控制的干预频度从而抑制乘坐者的不适感、不安感的车辆控制系统。
6.本公开的某个方案应用于控制进行自动驾驶的车辆的车辆控制系统。车辆控制系统具备:自动驾驶控制装置,生成用于车辆的自动驾驶的目标轨迹;以及车辆行驶控制装置,执行以车辆追随目标轨迹的方式控制车辆的行驶控制量的车辆行驶控制。车辆行驶控制装置具备获取驾驶环境信息的多个传感器装置,所述驾驶环境信息是表示车辆的驾驶环境的信息。车辆行驶控制装置被配置为:基于驾驶环境信息来判定行驶辅助控制的工作条件是否成立,所述行驶辅助控制是以减轻对于车辆的行驶的风险为目的而进行对行驶控制量的干预的控制;以及在工作条件成立的情况下,执行行驶辅助控制。车辆行驶控制装置被配置为:基于驾驶环境信息来生成作为与风险相关的信息的风险信息;以及在工作条件成立之前,将风险信息发送给自动驾驶控制装置。自动驾驶控制装置被配置为基于接收到的风险信息来生成或修正目标轨迹。
7.在上述方案中,风险信息包括与作为风险的对象的风险物标相关的风险物标信息。自动驾驶控制装置被配置为基于风险物标信息来生成或修正目标轨迹。
8.在上述方案中,风险信息包括与作为风险的对象的风险环境相关的风险环境信
息。自动驾驶控制装置被配置为基于风险环境信息来生成或修正目标轨迹。
9.在上述方案中,风险信息包括基于驾驶环境信息而生成的推荐轨迹。自动驾驶控制装置被配置为基于推荐轨迹来生成或修正目标轨迹。
10.在上述方案中,自动驾驶控制装置被配置为基于风险信息的可靠度来生成或修正目标轨迹。
11.在上述方案中,自动驾驶控制装置被配置为:判定接收到的风险信息是否与应该使目标轨迹优先的规定场景关联;以及在判定为风险信息与规定场景关联的情况下,将判定结果通知给车辆行驶控制装置。车辆行驶控制装置被配置为:在接到判定结果的通知的情况下,限制与规定场景对应的行驶辅助控制的执行。
12.根据本公开,车辆行驶控制装置基于驾驶环境信息来生成风险信息,并将该风险信息发送给自动驾驶控制装置,其中,所述驾驶环境信息基于多个传感器装置来获取。自动驾驶控制装置基于接收到的风险信息来生成或修正目标轨迹。由此,能使由车辆行驶控制装置的多个传感器装置判断出的风险反映至目标轨迹,因此能降低由车辆行驶控制装置进行的行驶辅助控制的干预频度从而抑制乘坐者的不适感、不安感。
附图说明
13.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
14.图1是表示用于对本实施方式的车辆控制系统的概要进行说明的构成例的框图。
15.图2是表示本实施方式的自动驾驶控制装置的构成例的框图。
16.图3是表示本实施方式的自动驾驶控制装置的第一控制装置所执行的目标轨迹生成处理的控制例程的流程图。
17.图4是表示本实施方式的车辆行驶控制装置的构成例的框图。
18.图5是表示第二控制装置所执行的与碰撞避免控制相关的处理的例程的流程图。
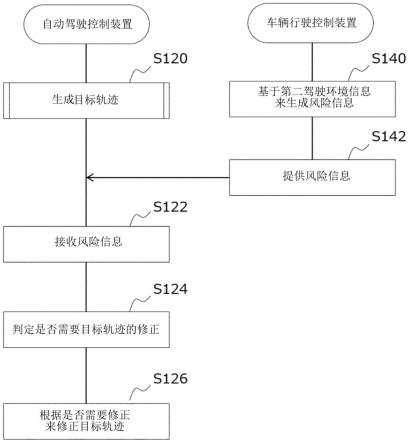
19.图6是用于对风险信息提供控制和目标轨迹修正处理的流程进行说明的流程图。
20.图7是表示进行目标轨迹的修正处理的场景的一个例子的图。
21.图8是表示进行目标轨迹的修正处理的场景的其他例子的图。
22.图9是表示车辆v1超越先行车辆的场景的一个例子的图。
具体实施方式
23.以下,参照附图对本公开的实施方式进行说明。不过,在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数字的情况下,除了特别明示的情况、在原理上明显地确定为该数字的情况之外,本公开并不限定于该提及的数字。此外,就在以下所示的实施方式中进行说明的构造等而言,除了特别明示的情况、在原理上明显地确定为该构造等的情况之外,在本公开中不一定是必须的。
24.实施方式.
25.1.本实施方式的车辆控制系统的整体构成
26.首先,对本实施方式的车辆控制系统的概略构成进行说明。图1是表示用于对本实施方式的车辆控制系统的概要进行说明的构成例的框图。图1所示的车辆控制系统100搭载
于车辆。以下,将搭载有车辆控制系统100的车辆也表述为“车辆v1”。车辆v1是能自动驾驶的自动驾驶车辆。作为此处的自动驾驶,假定了sae(society of automotive engineers:美国汽车工程师学会)的等级定义中的三级以上的自动驾驶。需要说明的是,车辆v1的动力源没有限定。
27.车辆控制系统100控制车辆v1。或者,也可以是,车辆控制系统100的至少一部分配置于车辆的外部的外部装置,远程地控制车辆。就是说,车辆控制系统100可以分散地配置于车辆v1和外部装置。
28.如图1所示,车辆控制系统100被配置为包括自动驾驶控制装置10、车辆行驶控制装置20以及行驶装置60。自动驾驶控制装置10是用于进行车辆v1的自动驾驶的管理的系统。车辆行驶控制装置20是用于进行车辆v1的车辆行驶控制的系统。自动驾驶控制装置10和车辆行驶控制装置20既可以是在物理上分开的装置,也可以是相同的装置。在自动驾驶控制装置10和车辆行驶控制装置20是在物理上分开的装置的情况下,它们通过通信来交换所需的信息。
29.行驶装置60包括转向装置、驱动装置以及制动装置。转向装置对车辆v1的车轮进行转舵。驱动装置是使车辆v1的驱动力产生的驱动源。作为驱动装置,可举例示出发动机、电动机。制动装置使车辆v1产生制动力。行驶装置60基于与车辆v1的转向、加速以及减速有关的行驶控制量来控制车辆v1的行驶。
30.自动驾驶控制装置10具有自动驾驶功能部8来作为用于进行车辆v1的自动驾驶的功能。此外,车辆行驶控制装置20具有运动控制功能部30、行驶辅助功能部40以及风险信息提供功能部50来作为用于进行车辆行驶控制、预防安全控制以及风险信息提供控制的功能。以下,还参照图2至图5对自动驾驶控制装置10和车辆行驶控制装置20的构成和功能进行说明。
31.2.自动驾驶控制装置的构成和功能
32.图2是表示本实施方式的自动驾驶控制装置的构成例的框图。如该图所示,自动驾驶控制装置10具备用于管理车辆v1的自动驾驶的第一控制装置12。此外,自动驾驶控制装置10具备连接于第一控制装置12的输入侧的第一信息获取装置14。
33.第一信息获取装置14被配置为包括周边状况传感器141、车辆状态传感器142、车辆位置传感器143以及通信装置144。
34.周边状况传感器141识别车辆v1的周边信息。例如,周边状况传感器141可举例示出摄像机(拍摄装置)、激光雷达(lidar:laser imaging detection and ranging(激光成像探测和测距))以及雷达等。周边信息包括由周边状况传感器141识别出的物标信息。作为物标,可举例示出周边车辆、行人、路边物、障碍物、白线、信号灯等。物标信息包括物标相对于车辆v1的相对位置和相对速度。在周边状况传感器141中识别出的周边信息随时被发送至第一控制装置12。
35.车辆状态传感器142检测表示车辆v1的状态的车辆信息。作为车辆状态传感器142,可举例示出车速传感器、横向加速度传感器、横摆角速度传感器等。由车辆状态传感器142检测到的车辆信息随时被发送至第一控制装置12。
36.车辆位置传感器143检测车辆v1的位置和方位。例如,车辆位置传感器143包括gps(global positioning system:全球定位系统)传感器。gps传感器接收从多个gps卫星发送
的信号,并基于接收信号来计算车辆v1的位置和方位。车辆位置传感器143也可以进行众所周知的自身位置推定处理(localization:定位)来提高车辆v1的当前位置的精度。由车辆位置传感器143检测到的车辆信息随时被发送至第一控制装置12。
37.通信装置144与车辆和外部进行通信。例如,通信装置144经由通信网络与车辆v1的外部装置进行通信。此处的外部装置可举例示出路侧机、周边车辆、周围的基础设施等。路侧机是发送例如拥堵信息、各车道的交通信息、临时停止等管制信息、盲区位置的交通状况的信息等的信标(beacon)装置。此外,在外部装置是周边车辆的情况下,通信装置144在与周边车辆之间进行车车间通信(v2v通信)。而且,在外部装置是周边的基础设施的情况下,通信装置144在与周围的基础设施之间进行路车间通信(v2i通信)。
38.第一控制装置12是进行车辆控制系统100中的各种处理的信息处理装置。典型而言,第一控制装置12是具备第一处理器122、第一存储装置124以及第一输入输出接口126的微型计算机。第一控制装置12也被称为ecu(electronic control unit:电子控制单元)。
39.在第一存储装置124中储存有各种信息。例如,在第一存储装置124中储存有由第一信息获取装置14获取到的第一驾驶环境信息。第一驾驶环境信息是表示车辆v1的驾驶环境的信息,包括表示车辆v1的位置的车辆位置信息、表示车辆v1的状态的车辆状态信息、表示车辆v1的周围的状况的周边状况信息等。作为第一存储装置124,可举例示出易失性存储器、非易失性存储器、hdd(hard disk drive:硬盘驱动器)等。
40.在第一存储装置124中储存有包含详细的道路信息的地图信息。在该地图信息中包括例如道路的形状、车道数、车道宽度的信息等。或者,地图信息也可以储存于外部的管理服务器。在该情况下,第一控制装置12与管理服务器进行通信来获取所需的地图信息。获取到的地图信息记录于第一存储装置124。
41.第一处理器122执行作为计算机程序的自动驾驶软件。自动驾驶软件储存于第一存储装置124。或者,自动驾驶软件记录于计算机可读取记录介质。第一处理器122执行自动驾驶软件,由此第一控制装置12的功能被实现。
42.具体而言,第一处理器122执行与车辆v1的自动驾驶相关的自动驾驶软件,由此自动驾驶功能部8的功能被实现。就是说,自动驾驶功能部8作为进行车辆v1的自动驾驶的功能而被嵌入第一控制装置12。典型而言,第一控制装置12进行生成用于车辆v1的自动驾驶的目标轨迹的目标轨迹生成处理。此外,第一控制装置12接受后述的风险信息的提供,进行修正目标轨迹的目标轨迹修正处理。
43.在此,目标轨迹至少包括车辆v1所行驶的道路内的车辆v1的目标位置[xi,yi]的集合。需要说明的是,此处的x方向是车辆v1的前方方向,y方向是与x方向正交的平面方向。需要说明的是,目标轨迹还可以包括每个目标位置[xi,yi]的目标速度[vxi,vyi]。
[0044]
图3是表示本实施方式的自动驾驶控制装置的第一控制装置所执行的目标轨迹生成处理的控制例程的流程图。需要说明的是,图3所示的控制例程在车辆v1的自动驾驶中以规定的控制周期被反复执行。
[0045]
在图3所示的控制例程中,首先,第一控制装置12从第一信息获取装置14获取第一驾驶环境信息(步骤s100)。第一驾驶环境信息储存于第一存储装置124。
[0046]
接着,第一控制装置12基于地图信息、第一驾驶环境信息以及风险信息来生成用于车辆v1的自动驾驶的目标轨迹(步骤s102)。更详细而言,第一控制装置12基于地图信息
和第一驾驶环境信息来生成自动驾驶中的车辆v1的行驶计划。第一控制装置12基于第一驾驶环境信息来生成车辆v1按照所生成的行驶计划行驶所需的目标轨迹。
[0047]
例如,第一控制装置12生成用于先行车辆的超越的目标轨迹。更详细而言,第一控制装置12基于周边状况信息来识别先行车辆。进而,第一控制装置12基于车辆状态信息和周边状况信息来预测车辆v1和先行车辆各自的将来的位置,并生成用于供车辆v1避开并超越先行车辆的目标轨迹。
[0048]
第一输入输出接口126是用于在与车辆行驶控制装置20之间交换信息的接口。第一控制装置12将所生成的目标轨迹经由第一输入输出接口126输出至车辆行驶控制装置20(步骤s104)。每当目标轨迹被更新时,最新的目标轨迹被输出至车辆行驶控制装置20。
[0049]
3.车辆行驶控制装置的构成和功能
[0050]
图4是表示本实施方式的车辆行驶控制装置的构成例的框图。如该图所示,车辆行驶控制装置20具备第二控制装置22、第二信息获取装置24以及第二输入输出接口226。
[0051]
第二信息获取装置24被配置为包括周边状况传感器241和车辆状态传感器242来作为多个传感器装置。
[0052]
周边状况传感器241识别车辆v1的周边信息。例如,周边状况传感器241可举例示出摄像机(拍摄装置)、激光雷达(lidar:laser imaging detection and ranging)以及雷达等。周边信息包括由周边状况传感器241识别出的物标信息。作为物标,可举例示出周边车辆、行人、路边物、障碍物、白线、信号灯等。物标信息包括物标相对于车辆v1的相对位置、相对速度、相对加速度、碰撞剩余时间(ttc;time to collision(碰撞时间))以及碰撞概率、物标的存在概率、将来轨迹等。在周边状况传感器241中识别出的周边信息随时被发送至第二控制装置22。
[0053]
车辆状态传感器242检测表示车辆v1的状态的车辆信息。作为车辆状态传感器242,可举例示出车速传感器、横向加速度传感器、横摆角速度传感器等。由车辆状态传感器242检测到的车辆信息随时被发送至第二控制装置22。
[0054]
需要说明的是,第一信息获取装置14和第二信息获取装置24可以部分地共同化。例如,周边状况传感器141和周边状况传感器241可以相同。车辆状态传感器142和车辆状态传感器242也可以相同。就是说,自动驾驶控制装置10和车辆行驶控制装置20可以共用第一信息获取装置14或者第二信息获取装置24的一部分。在该情况下,自动驾驶控制装置10和车辆行驶控制装置20相互交换所需的信息。
[0055]
此外,第二信息获取装置24除了具备周边状况传感器241和车辆状态传感器242之外还可以具备与车辆位置传感器143、通信装置144相同的装置。
[0056]
第二控制装置22是进行车辆控制系统100中的各种处理的信息处理装置。典型而言,第二控制装置22是具备第二处理器222、第二存储装置224以及第二输入输出接口226的微型计算机。第二控制装置22也被称为ecu(electronic control unit)。
[0057]
在第二存储装置224中储存有各种信息。例如,在第二存储装置224中储存有由第二信息获取装置24获取到的第二驾驶环境信息。第二驾驶环境信息是表示车辆v1的驾驶环境的信息,包括上述的周边信息和车辆信息等。此外,在第二存储装置224中储存有后述的风险信息。作为第二存储装置224,可举例示出易失性存储器、非易失性存储器、hdd(hard disk drive)等。
被设为工作条件。其结果是,在工作条件不成立的情况下,本例程的处理结束。另一方面,在工作条件成立的情况下,第二控制装置22计算用于避免向回避对象的碰撞的干预行驶控制量(步骤s116)。计算出的干预行驶控制量被输出给运动控制功能部30。
[0071]
基本上,运动控制功能部30以车辆v1追随目标轨迹的方式运算车辆v1的行驶控制量。不过,在从行驶辅助功能部40输入了干预行驶控制量的情况下,运动控制功能部30基于从行驶辅助功能部40输入的干预行驶控制量来修正行驶控制量。典型而言,在从行驶辅助功能部40输入了干预行驶控制量的情况下,运动控制功能部30将干预行驶控制量作为最终的行驶控制量输出。
[0072]
5.本实施方式的车辆控制系统100的特征
[0073]
在车辆v1的自动驾驶的过程中,自动驾驶控制装置10基于第一驾驶环境信息来判断对于车辆v1的行驶的碰撞风险,并生成目标轨迹。车辆行驶控制装置20以车辆v1追随目标轨迹的方式控制车辆v1的行驶装置60。
[0074]
在此,自动驾驶控制装置10对碰撞风险的判断与车辆行驶控制装置20对碰撞风险的判断不一定一致。例如,也可以想到以下状况:在自动驾驶控制装置10生成了用于接近先行车辆并进行超越的目标轨迹的情况下,车辆行驶控制装置20判断为与先行车辆的碰撞风险高而进行基于行驶辅助控制的干预。若频繁地被干预了行驶辅助控制,则车辆v1的乘坐者、周围的人可能会感到不适感、不安感。若自动驾驶控制装置10单方面地拒绝行驶辅助控制的干预来作为其对策,则无法谋求针对自动驾驶控制装置10未识别出或识别不充分的碰撞风险的安全性的提高。
[0075]
因此,在本实施方式的车辆控制系统100中,设为车辆行驶控制装置20执行风险信息提供控制,自动驾驶控制装置10执行目标轨迹修正处理,由此解决上述的问题。图6是用于对风险信息提供控制和目标轨迹修正处理的流程进行说明的流程图。以下,参照流程图,对这些控制的具体内容进行说明。
[0076]
5-1.风险信息提供控制
[0077]
首先,对车辆行驶控制装置20的第二控制装置22所执行的风险信息提供控制进行说明。在风险信息提供控制中,首先,车辆行驶控制装置20基于第二驾驶环境信息来生成与对于车辆v1的行驶的碰撞风险相关的信息(步骤s140)。该信息以下被称为“风险信息”。典型而言,作为风险信息,可举例示出风险物标信息、风险环境信息或推荐轨迹信息。
[0078]
风险物标信息是与在车辆v1的行驶中有碰撞风险的风险物标相关的信息。在风险物标信息中包括风险物标相对于车辆v1的相对位置、相对速度、相对加速度、碰撞剩余时间(ttc)、碰撞概率、风险物标的存在概率(可靠度)等。风险物标的存在概率(可靠度)例如可以使用以通过周边状况传感器241连续地检测到风险物标的时间为基础而运算出的指标。
[0079]
风险环境信息是与在车辆v1的行驶中有碰撞风险的风险环境相关的信息。作为风险环境信息,可举例示出道路的白线、道路边缘、有盲区的交叉口、停放车辆间的盲区、等待右转或左转的车辆的盲区等。推荐轨迹信息是与为了减少碰撞风险而推荐的推荐轨迹相关的信息。
[0080]
车辆行驶控制装置20的第二控制装置22基于从第二信息获取装置24获取到的第二驾驶环境信息来生成这些风险信息。所生成的风险信息随时被储存于第二存储装置224。然后,在与该风险信息相关的行驶辅助控制的工作条件成立之前,第二控制装置22将风险
信息经由第二输入输出接口226发送(提供)给自动驾驶控制装置10(步骤s142)。
[0081]
5―2.目标轨迹修正处理
[0082]
接着,对自动驾驶控制装置10的第一控制装置12所执行的目标轨迹修正处理进行说明。自动驾驶控制装置10通过图3所示的目标轨迹生成处理来生成目标轨迹(步骤s120)。在目标轨迹修正处理中,自动驾驶控制装置10首先接收从车辆行驶控制装置20提供的风险信息(步骤s122)。接着,自动驾驶控制装置10基于接收到的风险信息来判定是否需要目标轨迹的修正(步骤s124)。然后,自动驾驶控制装置10根据判定出的是否需要修正来进行目标轨迹的修正(重新运算)(步骤s126)。
[0083]
基本上,自动驾驶控制装置10以消除风险信息中所包括的碰撞风险的方式修正目标轨迹。不过,根据车辆v1所行驶的场景,有时也会采取不修正目标轨迹的应对。以下,举例示出一些场景来对在自动驾驶控制装置10的第一控制装置12中执行的目标轨迹的修正处理进行说明。
[0084]
例如,在从车辆行驶控制装置20提供的风险信息是风险物标信息的情况下,在风险物标信息中包括风险物标相对于车辆v1的相对位置、相对速度、相对加速度、碰撞剩余时间(ttc)、碰撞概率、风险物标的存在概率(可靠度)等信息。第一控制装置12基于风险物标信息中所包括的这些信息来判断是否需要进行目标轨迹的修正。
[0085]
由自动驾驶控制装置10执行的目标轨迹的修正处理根据所遇到的场景而可以考虑各种应对。作为一个例子,考虑风险物标信息中所包括的风险物标是在道路宽度较宽的道路的路边的行人的场景。图7是表示进行目标轨迹的修正处理的场景的一个例子的图。在该场景中,在未识别出对向车辆的存在的情况下,可以判断为:即使进一步扩大与行人的间隔来行驶,也没有与对向车辆等的碰撞风险。因此,在这样的场景下,例如,第一控制装置12判断为需要修正目标轨迹,为了减轻车辆行驶控制装置20所考虑的碰撞风险,有效利用风险物标信息来以与行人的间隔进一步扩大的方式修正目标轨迹。
[0086]
图8是表示进行目标轨迹的修正处理的场景的其他例子的图。在该图所示的场景中,在风险物标信息中所包括的风险物标是在道路的路边的行人的场景下,自动驾驶控制装置10将对向车辆识别为风险物标。在该情况下,可以判断为:若进一步扩大与行人的间隔来行驶,则有与对向车辆的碰撞风险。在这样的场景下,例如,第一控制装置12判断为无需修正目标轨迹,或者为了减轻车辆行驶控制装置20所考虑的碰撞风险而以进一步减速的方式修正目标轨迹。
[0087]
作为其他例子,考虑风险物标信息中所包括的风险物标是自动驾驶控制装置10已经识别出的风险物标的场景。在该情况下,第一控制装置12将风险物标信息中所包括的风险物标的生存概率(可靠度)与根据第一驾驶环境信息得到的风险物标的生存概率(可靠度)进行比较。在风险物标信息中所包括的风险物标的生存概率(可靠度)高于根据第一驾驶环境信息得到的风险物标的生存概率(可靠度)的情况下,可以判断为车辆行驶控制装置20以比自动驾驶控制装置10更高的可靠度检测到风险物标。在这样的场景下,例如,第一控制装置12使风险物标信息中所包括的风险物标的信息优先来修正目标轨迹。
[0088]
或者,在风险物标信息中所包括的风险物标的生存概率(可靠度)低于根据第一驾驶环境信息得到的风险物标的生存概率(可靠度)的情况下,可以判断为通过现状的目标轨迹充分地减轻了对于该风险物标的碰撞风险。在这样的场景下,例如,第一控制装置12判断
为无需进行对目标轨迹的修正。
[0089]
作为其他例子,考虑风险物标信息中所包括的风险物标是自动驾驶控制装置10未识别出的风险物标的场景。在该情况下,有时可以判断为通过现状的目标轨迹未减轻对于该风险物标的碰撞风险。在这样的场景下,例如,第一控制装置12以减轻对于该风险物标的碰撞风险的方式修正目标轨迹。
[0090]
在从车辆行驶控制装置20提供的风险信息是推荐轨迹信息的情况下,第一控制装置12判断为需要调停这些轨迹并以最大限度地确保车辆v1的安全的方式修正目标轨迹。
[0091]
根据这样的目标轨迹修正处理,能使用从车辆行驶控制装置20提供的风险信息来修正目标轨迹。由此,在行驶辅助控制的工作条件成立之前,能得到修正目标轨迹的机会,因此能降低由车辆行驶控制装置20进行的行驶辅助控制的干预频度从而抑制乘坐者的不适感、不安感。
[0092]
6.变形例
[0093]
本实施方式的车辆控制系统100也可以采用如以下这样变形的方案。
[0094]
6-1.变形例1
[0095]
车辆行驶控制装置20所执行的行驶辅助控制不限于碰撞避免控制(pcs)。即,车辆行驶控制装置20可以执行防止偏离车道的车道偏离警报(lda:lane departure alert)、主动驾驶辅助(pda:proactive driving assist)等广泛的行驶辅助控制。
[0096]
6-2.变形例2
[0097]
设为了自动驾驶控制装置10基于从车辆行驶控制装置20提供的风险信息来修正所生成的目标轨迹。然而,也可以设为自动驾驶控制装置10在目标轨迹生成处理中也考虑风险信息来生成目标轨迹。
[0098]
6-3.变形例3
[0099]
即使在自动驾驶控制装置10在考虑了碰撞风险之后生成目标轨迹的情况下,车辆行驶控制装置20有时也判断为有碰撞风险并将风险信息也发送至自动驾驶控制装置10。图9是表示车辆v1超越先行车辆的场景的一个例子的图。例如在自动驾驶控制装置10超越先行车辆时车辆v1与先行车辆的车间距离暂时地变窄的场景等符合该场景。在这样的情况下,可以认为自动驾驶控制装置10即使接收到风险信息也不变更目标轨迹。然而,在不变更目标轨迹的情况下,车辆行驶控制装置20的行驶辅助控制的工作条件会成立,会进行基于行驶辅助控制的不必要的干预。
[0100]
因此,车辆行驶控制装置20判定接收到的风险信息是否与应该使所生成的目标轨迹优先的规定场景关联。除了上述的赶超先行车辆的场景之外,车辆行驶控制装置20暂时地使与先行车辆、后续车辆的车间距离变窄这样的场景等也符合此处的规定场景。
[0101]
自动驾驶控制装置10在判定为被提供的风险信息与规定场景关联的情况下,将判定结果通知给车辆行驶控制装置20。接到判定结果通知的车辆行驶控制装置20限制与规定场景对应的行驶辅助控制的执行。在此,车辆行驶控制装置20向行驶辅助控制的工作条件难以成立的方向变更阈值。或者,车辆行驶控制装置20禁止行驶辅助控制的工作。
[0102]
根据这样的动作,在从车辆行驶控制装置20提供的风险信息与应该使自动驾驶控制装置10的目标轨迹优先的规定场景关联的情况下,能限制与该规定场景对应的行驶辅助控制的执行。由此,能防止在无需执行行驶辅助控制的规定场景下行驶辅助控制被执行。
[0103]
6-4.变形例4
[0104]
自动驾驶控制装置10和车辆行驶控制装置20也可以分开设计、开发。例如,负责车辆行驶控制的车辆行驶控制装置20由精通机械、车辆运动特性的开发者(典型而言为汽车制造商)设计、开发。在该情况下,车辆行驶控制装置20的可靠度极高。以利用这样的高可靠度的行驶辅助功能部40为前提,自动驾驶服务提供者能设计、开发自动驾驶控制装置10用的软件。在该意义上,车辆行驶控制装置20可以说是用于自动驾驶服务的平台。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1