一种纯电动汽车的电流反时限保护方法与流程
1.本发明属于电动汽车功率领域,尤其是涉及一种纯电动汽车的电流反时限保护方法。
背景技术:
2.电动汽车的运行工况复杂,可能需要运行在经常连续爬坡的的工况,按照法规电动汽车动力系统需求设计,运行在峰值扭矩需要保持1min,然后可以降转矩输出,根据功率器件的输出特性,在不同电流值下,功率器件的持续输出时间是不一样,功率器件的电流值越大,所允许输出的时间越短,为了更好的拟合该输出特性,设计一种不同电流的可持续特性曲线对于分析纯电动汽车的连续爬坡工况具有重要意义。
技术实现要素:
3.有鉴于此,本发明旨在提出一种纯电动汽车的电流反时限保护方法,以解决现有的电动汽车在连续爬坡的工况下功率器件持续输出时间受电流值影响,不方便分析电动汽车的功率特性的问题。
4.为达到上述目的,本发明的技术方案是这样实现的:
5.一种纯电动汽车的电流反时限保护方法,具体步骤如下:
6.s1、获取电机控制器持续允许的额定电流i
an
及电机控制器当前的实时电流i
current
计算电机控制器当前的热量速度值v
calor
;
7.s2、根据步骤s1中,实时电流过载倍数对应的v
calor
,电机控制器每n ms计算一次实时总热量累积值s1;
8.s3、根据电机控制器允许的过载倍数x和允许过载持续时间t1,获取允许总热量累积值s2,当实时总热量累积值s1大于允许总热量累积值s2,则进行降转矩输出;当电流实时过载倍数小于1,实时总热量累积值s1减小,实时总热量累积值s1减小到人为设定值s3,则调整控制器输出为转矩功率最大值。
9.进一步的,电机控制器当前的热量速度值v
calor
计算公式为:
[0010][0011]
为实时电流过载倍数。
[0012]
进一步的,电机控制器每n ms计算一次当前实时总热量累积值s1计算公式为:
[0013][0014]
m为累积计算当前总热量累积值t
sum
的次数,为实时过载持续时间t1除以n。
[0015]
进一步的,步骤s3中,允许总热量累积值具体计算公式为:
[0016]
s2=(x
2-1)*1024*t1/n。
[0017]
进一步的,步骤s3中,所述人为设定值确定方法:
[0018]
人为设定过载倍数y和在设定过载倍数下的持续的时间t2,设定过载倍数小于1;
[0019]
人为设定值具体计算公式:
[0020]
s3=[(x
2-1)*1024*t1/n]-[(y
2-1)*1024*t2/n]。
[0021]
相对于现有技术,本发明所述的一种纯电动汽车的电流反时限保护方法具有以下有益效果:
[0022]
(1)本发明所述的一种纯电动汽车的电流反时限保护方法,计算方法简单,可以最大程序拟合电机控制器功率器件的电流温度特性曲线,能有效起到对电机控制器功率器件温度的保护作用。
[0023]
(2)本发明所述的一种纯电动汽车的电流反时限保护方法,过程一,当实时总热量累积值大于允许总热量累积值,则进行降转矩输出,保证电机控制器温度不要过高,防止电机控制器过温损坏;过程二,当出现控制器实时总热量累积值低于人为设定值时,温度下降到合适的温度,控制电机控制器输出最大转矩功率值,提升电动车运行性能;循环两个过程,保持电机控制器温度安全与电动汽车运行性能的平衡。
附图说明
[0024]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0025]
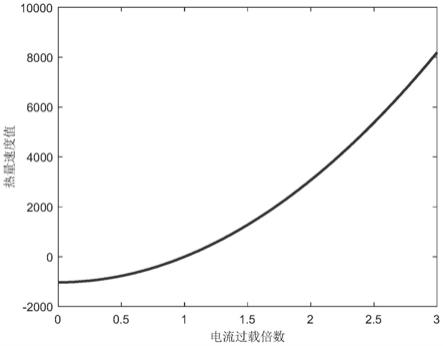
图1为本发明实施例所述的电流过载倍数与热量速度关系示意图。
具体实施方式
[0026]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0027]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0028]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
[0029]
下面将参考附图并结合实施例来详细说明本发明。
[0030]
如图1所示,1.一种纯电动汽车的电流反时限保护方法,其特征在于:具体步骤如下:
[0031]
s1、获取电机控制器持续允许的额定电流i
an
及电机控制器当前的实时电流i
current
计算电机控制器当前的热量速度值v
calor
;
[0032]
s2、根据步骤s1中,实时电流过载倍数对应的v
calor
,电机控制器每n ms计算一次实时总热量累积值s1;
[0033]
s3、根据电机控制器允许的过载倍数x和允许过载持续时间t1,获取允许总热量累积值s2,当实时总热量累积值s1大于允许总热量累积值s2,则进行降转矩输出;当电流实时过载倍数小于1,实时总热量累积值s1减小,实时总热量累积值s1减小到人为设定值s3,则调整控制器输出为转矩功率最大值。
[0034]
如图1所示,电机控制器当前的热量速度值v
calor
计算公式为:
[0035][0036]
为实时电流过载倍数。
[0037]
当实际电流大于额定电流时,t
calor
为正值代表控制器是在产生热量,且实际电流比额定电流的比值越大,计算出t
calor
的热量速度值越大;当实际电流小于额定电流时,t
calor
为负值代表控制器是在消耗热量,且实际电流比额定电流的比值越小,计算出t
calor
的热量速度值越小。
[0038]
电机控制器每n ms计算一次当前实时总热量累积值s1计算公式为:
[0039][0040]
m为累积计算当前总热量累积值t
sum
的次数,为实时过载持续时间t1除以n。
[0041]
步骤s3中,允许总热量累积值具体计算公式为:
[0042]
s2=(x
2-1)*1024*t1/n
[0043]
步骤s3中,所述人为设定值确定方法:
[0044]
人为设定过载倍数y和在设定过载倍数下的持续的时间t2,设定过载倍数小于1;
[0045]
人为设定值具体计算公式:
[0046]
s3=[(x
2-1)*1024*t1/n]-[(y
2-1)*1024*t2/n]。
[0047]
假设电机控制器允许电流3倍过载时,持续时间允许为30s,根据公式每50ms累加一次3倍过载所对应的允许热量速度值8192,所允许的总热量累积值s2对应为4195200,当检测到s1>4195200时,进行降转矩输出,如果出现电流过载倍数小于1,此时实时总热量累积值s1会减小,当减小到一定值便可以允许恢复控制器输出转矩功率最大值。
[0048]
允许热量速度值8192,具体计算过程:
[0049]
[3
2-1]*1024=[9-1]*1024=8*1024=8192;
[0050]
允许总热量累积值s2为4195200,具体计算过程:
[0051]
电机控制器允许电流3倍过载时,持续时间允许为30s,热量计算周期为50ms,
[0052]
每50ms累加一次热量8192,执行600次50ms(600*50ms=30000ms)即为30s,允许总热量累积值s2=8192*600=4195200;
[0053]
如果出现实时电流过载倍数小于1,此时实时总热量累积值s1会减小,当减小到人为设定值便可以允许恢复控制器输出转矩功率最大值。
[0054]
例如,过载倍数为0.8即
[0055]
实时热量的累加加速为[0.8
2-1]*1024=[0.64-1]*1024=(-0.36)*1024=-368;
[0056]
此时总热量累积值s1=4195200每50ms执行一次s1=4195200-368=4194832;s1会逐渐减小,电流过载倍数越接近0,s1减小的速度越快;
[0057]
确定人为设定值中,设定过载倍数为0.8持续30s,可以恢复控制器输出转矩功率最大值,即需要执行600次50ms的-368;总热量为4195200-600*368=3974400;所以当总热量降为3974400,恢复控制器输出转矩功率最大值,整车动力性得到有效施展的同时可以高效的保护控制器不会因为热量的累积而损坏。
[0058]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1