主动驱动式伸缩支持装置及移动接触网的制作方法
本技术属于移动接触网,具体涉及一种主动驱动式伸缩支持装置及采用该装置的移动接触网。
背景技术:
1、现有的接触网中采用在两端设置门架,门架上设置行走装置,并分别连接移动接触线组件的两端,行走装置行走时能带动接触线组件移动,驱动整根接触线移动。
2、接触网的长度一般在800米,对于万吨线的移动接触网其长度可达到1700米左右。若采用上述方式存在巨大的缺陷,该方案是通过一根张紧的接触线来带动整个移动接触网中接触线组件从非工作位移动在工作位,接触线组件安装在伸缩机构上,在自然状态下,伸缩机构回缩,接触线处于铁路一侧边(非工作位);当两端的行走装置往工作位移动,带动张紧的接触线从非工作位往工作位移动(铁路上方),控制伸缩机构展开的力是从接触线上来的,采用这种方式存在的问题有:请参阅图1所示。
3、1、移动接触网移动段中所有接触线组件与接触网连接的地方会形成折弯点,在接触线折弯是移动接触网需要极力避免的问题,而采用上述方式必定会形成折弯点。以800米的移动接触网为例,假定立柱与立柱之间的距离在20米,需要40根立柱,分别编号为1、1+n…、20、…、40,门架上设置行走装置分别连接移动接触线组件的两端,行走装置行走时能带动第一根的接触线组件往工作位移动(此处会产生第一个折弯点,且最为明显),只有当第一和第四十根立柱中的伸缩机构伸展开有移动位移的时候,才会带动第二和第三十九根立柱上的伸缩机构伸展开,依次从两端逐渐往中间位带动。张紧的接触线中,只需要一个很小的力即可形成折弯点,当使用在更长距离的移动接触网种时,这种折弯形象更为明显。
4、2、存在拉不动的情况,门架中的行走装置移动拉动第一根伸缩机构伸展开,当第一根伸缩机构完全被拉伸开后,行走装置与第一立柱伸缩机构之间的承力索和/或接触线被拉伸到最大移动量,其不能再被拉,出现拉不动的情况,而此时,整个移动段中还有未被拉动到位的伸缩机构,即还有若干,特别是靠近中间位立柱的伸缩机构还有未完成走动到工作位的情况。中间位置的伸缩机构还没完全走到工作位,而两端的行走装置在门架上已走到其最大移动位置,不能被再被拉动。这种方案会出现拉不动,拉动不到位,特别是对于中间部分存在没法拉动的情况。
5、3、张紧的接触线中只需要一个很小的力即可形成折弯点,所以采用上述的这种方式中整个接触网移动段中的接触线会形成一个大的弧形,整个弧形的宽度会超过受电弓的取电宽度范围,出现整个移动接触网无法使用的情况。
6、4、这种方式在滑块处设置重力平衡装置来拉升滑块,或者在滑块的下方设置弹簧来拖住,或者在滑块的上方设置弹簧来拉升滑动以便克服滑块固有的重量。这种方式在一定程度上减小驱动伸缩机构伸出时所需的力。但问题点在于,当两端的行走装置走到位时,接触线上已经不能再提供水平移动的拉力,特别是对于中间位置的立柱的伸缩机构来讲,即便是通过配重给予滑块向上的提升力,当接触线中不再提供或者没法再提供的伸展拉力时,移动接触网中间位置立柱上的伸缩机构将不能进一步的展开,不能有效的完成将接触线推送到工作位。
7、5、另一种方式是在整个移动接触网中立柱1一侧采用张紧的钢丝绳来拉动各个立柱1中移动机构3的滑动端,一根贯串整个移动接触网长度的张紧的钢丝绳上面,在各立柱1相对应处连接一分支拉绳,各分支在分别连接在滑动端,通过张紧钢丝绳的左右移动带动各个分支中的滑动端上滑或者下滑。这种做法同样存在不足:
8、6、因为只是通过一根张紧的钢丝绳去控制若干滑动块的移动,在受力移动的过程中,各个分支点由于自身滑动端的重量,每个分支点作用在钢丝绳上均会形成一个拉力点,这些拉力点不能保持在同一直线上,张紧的钢丝绳也会形成弧线和折弯点,这样导致最严重的后果是,每个立柱上对应的滑动端其滑动的形成量不相同,在通过伸缩机构的作用,承力索和/或接触线水平移动的形成就不相同,导致承力索8和或接线水平移动的行程不相等,使得承力索和或接触线出现弧线,严重的导致受电弓不能有效取电;另一个问题,滑动端行程不一致还会导致伸缩机构自由端各自的水平高度不一致,造成承力索和或接触线不能保持在同一水平高度,会出现受电弓取电是不能接触到接触线的问题。
9、7、钢丝绳在使用的过程中,两端长久的拉力容易导致钢丝绳的长度形变增长,离拉动电机越近的钢丝绳其承载的拉力越大,因为各个分支的重量均汇总到这里,其形变增量越多,那对各个分支中滑动端的拉动滑动量就会产生影响,出现滑动量不相当的问题,在通过伸缩机构的作用,在承力索和或接触线上反映出来的弧度或者折弯点就更明显了。
10、8、钢丝绳本身的热胀冷缩的问题,移动接触网需要能够在零下20多度,零上40多大的温差范围工作,按照普通接触网的长度800米,那钢丝绳的热胀冷缩问题也会导致立柱上移动端的移动量不相当。那若更长的接触网中会出现靠近拉动电机处的立柱上的移动端移动到位了,越远的立柱中的移动端还没移动到位的情况。
11、而在实际的工况中上述三点问题是共同存在的,在通过伸缩机构的放大,同样存在使得接触线和或承力索会有折弯点,会形成弧线,出现了拉不动,存在展不开的伸缩机构或者展开不到位情况。
技术实现思路
1、通过上文可知,造成其存在诸多缺陷的本质原因在于,利用行走装置带动接触线水平方向移动,两行走装置之间张紧的接触线,通过这个张紧的接触线来带动伸缩机构网铁路上方移动,行走装置能够驱动接触线组件移动,以使接触线组件能在水平方向上靠近或远离所述立柱,伸缩机构随接触线组件移动而伸缩并支撑所述接触线组件。
2、这种方案中,张紧的接触线上任意位置一个较小的力都可以形成折弯点,任意一个接触网组件的伸展的力是要从其侧方位伸展开的伸缩机构中得来,当第一根和最后一根立柱的伸缩机构不能再伸展开的时候,中间位置任意接触网组件将不能再从侧方位提供伸展开的拉力,会有折弯点,会形成弧线,出现了拉不动,存在展不开的伸缩机构情况。
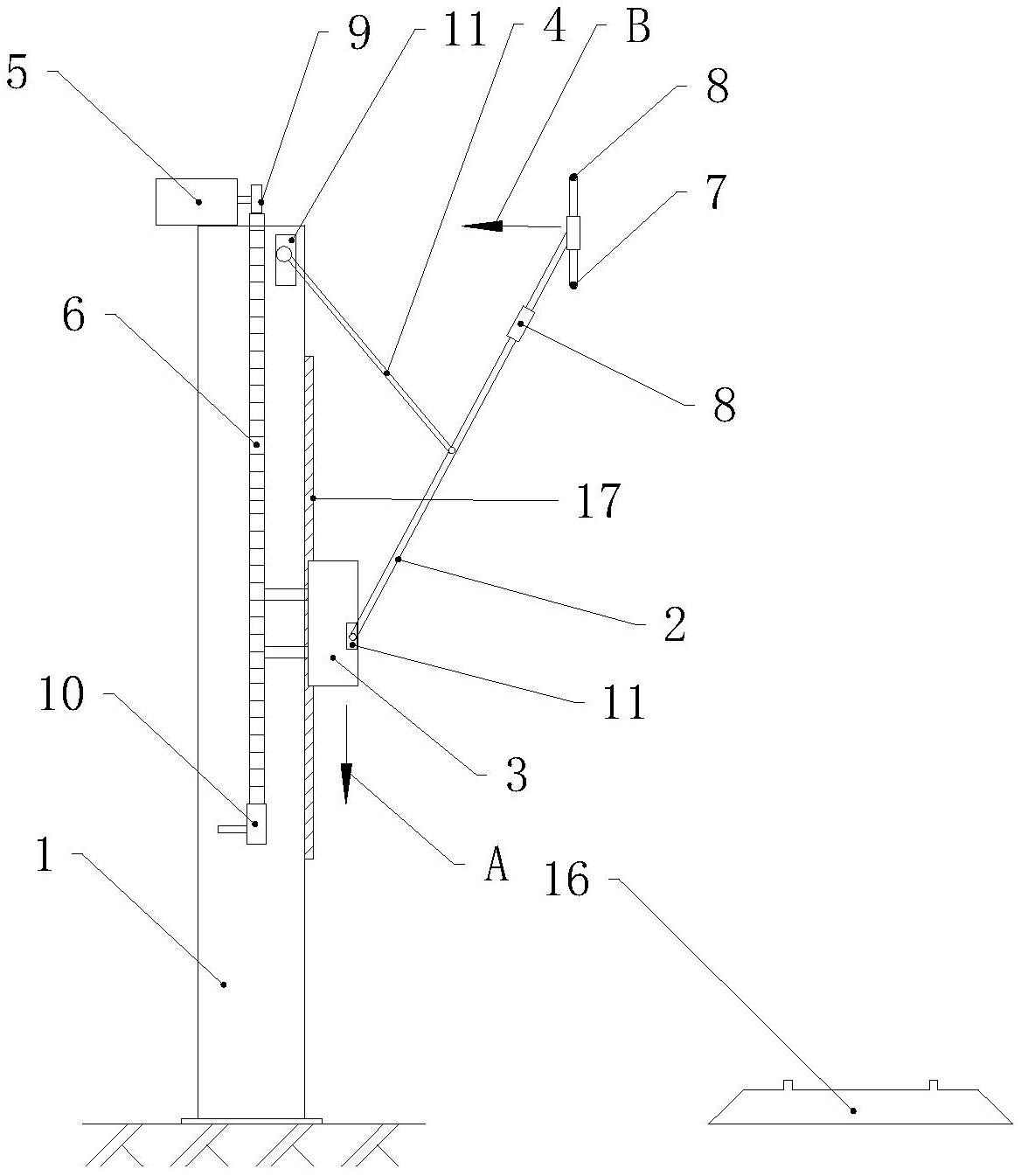
3、有鉴于此,本实用新型第一方面提供一种移动接触网主动驱动式伸缩支持装置,包括立柱、支持机构、移动机构、连接件、电机和链条,其中
4、所述移动机构能够沿立柱的长度方向移动,所述连接件的一端直接或者间接的与立柱连接,所述连接件的另一端直接或间接与支持机构连接;所述支持机构一端直接或间接与所述移动机构活动连接;所述电机驱动链条转动带动所述移动机构移动,以使所述支持机构的自由端带动接触线和/或承力索移动到工作位、非工作位或者在工作位与非工作位两者之间切换。
5、进一步的,电机直接或间接驱动链条转动带动移动机构上下移动,使得支持机构的自由端带动接触线和/或承力索往工作位移动或者往非工作位移动。
6、进一步的,还包括主动链轮,所述主动链轮设置在电机上,所述电机驱动主动链轮转动通过链条带动移动机构沿立柱的长度方向移动。。
7、进一步的,还包括从动链轮,所述主动链轮通过链条带动从动链轮,所述链条转动带动移动机构移动。
8、进一步的,还包括方向旋转机构,所述方向旋转机构直接或间接设置在移动机构或者立柱上,所述电机驱动移动机构上移或者下移,带动与方向旋转机构活动连接的支持机构移动,以使所述支持机构中的接触线和/或承力索移动到工作位、非工作位或者在工作位与非工作位之间切换。
9、进一步的,所述支持机构通过所述方向旋转机构能够实现整体的伸缩支持装置水平方向转动。
10、进一步的,所述方向旋转机构包括为支持机构提供水平方向转动的转动件和为支持机构提供收缩转动的转动件。
11、进一步的,所述方向旋转机构的设置方式有:
12、第一种:为支持结构提供水平方向转动的转动件包括转轴;为支持机构提供收缩转动的转动件包括铰接件,所述转轴直接或者间接的设置在移动机构上,所述铰接件设置在转轴上,所述支持结构的一端与铰接件铰接;
13、第二种:为支持结构提供水平方向转动的转动件包括铰接件;为支持机构提供收缩转动的转动件包括转轴,所述铰接件直接或者间接的设置在移动机构上,所述转轴直接或者间接的设置在铰接件上,所述支持结构的一端直接或者间接的与转轴活动连接;
14、第三种:为支持结构提供水平方向转动的转动件包括第一转动件;为支持机构提供收缩转动的转动件包括第二转动件,所述第一转动件直接或者间接的与移动机构相连,所述支持结构的一端直接或者间接的与第二转动件相连;
15、第四种:为支持结构提供水平方向转动的转动件包括第一环,为支持机构提供收缩转动的转动件包括第二环,所述第一环直接或者间接的与移动机构相连,所述支持结构的一端直接或者间接的第二环相连,所述第一环与第二环相扣;或者
16、第五种:采用万向铰接件,支持结构一端直接或者间接的通过万向铰接件设置在移动机构上。进一步的,所述方向旋转机构直接或间接设置在移动机构上和/或立柱上;
17、所述支持机构一端直接或间接通过方向旋转机构与所述移动机构活动连接,所述连接件的一端通过方向旋转机构与立柱活动连接;或者
18、所述支持机构一端直接或间接通过方向旋转机构与所述移动机构活动连接,所述连接件的另一端与支持机构活动连接。
19、进一步的,所述支持机构包括第一连杆和第二连杆,所述第一连杆的一端和第二连杆的一端均与所述方向旋转机构连接或者与移动机构活动连接,所述第一连杆的另一端和第二连杆的另一端活动连接有悬挂组件,所述悬挂组件上设置有承力索和/或接触线。
20、优选的,悬挂组件设置方式一:所述悬挂组件设置在支持机构另一端;所述悬挂组件上设置有承力索和/或接触线;或者
21、设置方式二:还包括绝缘子,所述绝缘子的一端与悬挂组件连接,所述绝缘子的另一端直接或者间接的设置有接触线。
22、进一步的,所述立柱上设置有用于辅助移动机构在竖直方向移动的限位结构;所述限位结构包括滑道、滑槽、滑轨、轨道或者限位架,所述移动机构在滑道、滑槽、滑轨、轨道或者限位架中沿立柱的长度方向移动。
23、本实用新型第二方面提供一种移动接触网,该移动接触网中采用两根以上上述的主动驱动式伸缩支持装置,若干主动驱动式伸缩支持装置中支持机构的另一端直接或间接的设置有承力索和/或接触线,通过立柱上各自电机使得支持机构自由端直接或者间接安装的承力索和或接触线保持在同一水平高度且基本形成一条直线。
24、进一步的,每一根主动驱动式伸缩支持装置中各自设置的电机驱动相对应的移动机构移动,每一个所述移动机构在各自对应立柱移动的行程相当,以使所述支持机构的自由端带动接触线和/或承力索移动到工作位或者非工作位。
25、进一步的,移动接触网中若干所述支持机构在工作位状态、或者非工作位状态或者在工作位与非工作位两者之间切换所述支持机构转动的过程中,所述支持机构通过所述方向旋转机构能够在水平方向转动。
26、第一种:移动接触网至少一端设置门架,门架上设置有移动小车和驱动装置,所述驱动装置用于驱动移动小车在门架的横梁上移动带动承力索和/或接触线移动;
27、第二种设置结构为:移动接触网至少一端设置重力补偿装置,承力索和/或接触线直接或者间接的作用在重力补偿装置上;
28、第三种设置结构为:移动接触网至少一端设置弹簧机构,承力索和/或接触线直接或者间接的作用在弹簧机构上;
29、第四种设置结构为:移动接触网至少一端设置拖拽机构,所述拖拽机构提供的拉力直接或者间接的作用在承力索和/或接触线上;或者
30、第五种设置机构为:移动接触网的两端采用第一种至第四种中任意两两组合。
31、相对于现有相关技术,本实用新型采用以上技术方案,具有如下有益效果:
32、1、相对于现有的技术方案,本实用新型中使用电机提供主体式的驱动,驱动移动机构能够沿立柱的长度方向移动,从而使得支持机构的另一端沿远离立柱的方向移动,带动接触线和/或承力索往工作位移动;或者使得支持机构的另一端沿靠近立柱的方向移动,带动接触线和/或承力索往非工作位移动。采用这种主动式的驱动方式,能够有效的避免现有技术存在折弯点情况,移动接触网中整体采用本实用新型提供的主动驱动式伸缩支持装置,不管是承力索和/或接触线从非工作位移动到工作位的过程,还是从工作位移动到非工作位的过程,整根承力索和/或接触线基本都可以保持在同一直线,避免了现有技术中出现弧线的技术缺陷;另一方面整个移动接触网中每一个立柱上均采用主动驱动式伸缩支持装置,避免了现有技术中出现拉不动,伸缩机构展不开不到位的情况。
33、2、本实用新型提供的方案,机构可靠,故障率低,能够有效的保证移动接触网的正常运行,特别是采用了如本方案提供的主动驱动式伸缩支持装置,可以有效增加移动接触网的长度,应用到万吨线货运线路上。
- 还没有人留言评论。精彩留言会获得点赞!