用于机动车辆的电驱动装置的制作方法
1.本实用新型涉及一种用于机动车辆的电驱动装置,更具体地,本实用新型涉及一种具有两挡变速的电驱动装置。
背景技术:
2.纯电动汽车指以车载电源为动力,用电机驱动车轮行驶的车辆。由于对环境影响相对内燃机汽车较小,前景被广泛看好,并且,考虑到电机功率密度和布置空间的要求,电驱动装置正在朝着集成化、多档位的方向发展。
3.现有技术的具有两挡变速的电驱动装置一般使用同步器来实现两挡变速。然而,这样的布置占用空间较大,不能实现紧凑的结构,不符合电驱动装置小型化的趋势。
技术实现要素:
4.本实用新型提供了解决上述问题的用于机动车辆的电驱动装置,该电驱动装置包括主壳体、电机、减速机构、切换机构和差速机构,其中,所述电机包括相对于所述主壳体固定的定子和可旋转的转子,所述转子固定连接有转子轴;所述转子轴联接到所述减速机构并且联接到所述切换机构;所述减速机构联接到所述切换机构;所述切换机构被构造成选择性地与所述减速机构或所述转子轴接合;并且所述切换机构与所述差速机构联接以将动力传递到所述差速机构。
5.利用该电驱动装置,能够以紧凑的布置实现两挡变速。
附图说明
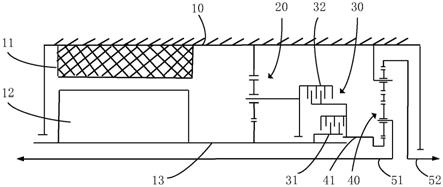
6.图1是根据本实用新型的一个实施例的电驱动装置的示意图;并且
7.图2是根据本实用新型的另一个实施例的电驱动装置的示意图。
具体实施方式
8.下面根据本实用新型的实施例结合附图来进一步说明。
9.图1示出了根据本实用新型的一个实施例的用于机动车辆的电驱动装置。该电驱动装置包括主壳体10、电机、减速机构20、切换机构30和差速机构40。
10.电机包括定子11和转子12,其中定子11相对于主壳体10固定,而转子12相对于定子11可旋转地设置,转子12固定连接到转子轴13。转子轴13与减速机构20以及切换机构30联接。
11.在图1中示出的实施例中,减速机构20为行星齿轮机构,其联接到切换机构30。该行星齿轮机构20包括太阳轮、行星轮、承载行星轮的行星载架和齿圈。具体地,行星齿轮机构20的太阳轮与电机的转子轴13联接,齿圈相对于主壳体10固定,而行星载架联接到切换机构30。
12.切换机构30被构造成可选择地与转子轴13或减速机构20接合。切换机构30还与差
速机构40联接。具体地,切换机构30与差速机构40的输入轴41联接。因为切换机构30可选择地与转子轴13或减速机构20接合,所以切换机构30可以选择性地将来自转子轴13或减速机构20的动力传递到差速机构40。差速机构40则将动力分配到与其联接的两个输出轴51、52。
13.在图1所示的实施例中,切换机构30为离合器对,并且包括第一离合器31和第二离合器32。转子轴13联接到第一离合器31,行星齿轮机构20的行星载架联接到第二离合器32。第一离合器31和第二离合器32均与差速机构40联接,更具体地,与差速机构40的输入轴41联接。当第一离合器31接合,第二离合器32分离时,来自转子轴13的动力被直接传递到差速机构40。当第一离合器31分离,第二离合器32接合时,来自转子轴13的动力经由减速机构20,即行星齿轮机构,传递到差速机构40。
14.需要说明的是,在本公开中,联接到行星齿轮机构的行星载架还包括联接到行星齿轮机构的行星轮轴。
15.在图1所示的实施例中,差速机构40为周转差速器(也叫周转行星齿轮组)。与常规的锥齿轮差速器相比,周转差速器具有更高的传动效率,结构更紧凑,成本更低,并且其壳体也更容易制造。该周转差速器40为两级行星齿轮差速器,其包括第一级行星齿轮组和第二级行星齿轮组。第一级行星齿轮组包括太阳轮、行星轮、承载行星轮的行星载架和齿圈。第一级行星齿轮组的太阳轮经由输入轴41与切换机构30联接,行星载架与输出轴51联接,齿圈用作第二级行星齿轮组的太阳轮。第二级行星齿轮组包括太阳轮(即,第一级行星齿轮组的齿圈)、行星轮、承载行星轮的行星载架和齿圈。第二级行星齿轮组的行星载架相对于电驱动装置的主壳体10固定,齿圈与输出轴52联接。通过设定第一级行星齿轮组和第二级行星齿轮组中的各部件的传动比,能够实现差速功能。
16.根据图1的电驱动装置,减速机构20的传动比可以被设定为i1=1+α=2.5,其中α=zr/zs,zr为齿圈的齿数,zs为太阳轮的齿数,周转差速器40的传动比以被设定为i
indi
=5.5~7。
17.根据图1的电驱动装置能够实现两挡变速,具体如下文所解释。
18.一挡时,第一离合器31分离,第二离合器32接合,行星载架联接到差速器40的输入轴41,来自电机的动力经由减速机构20、第二离合器32和差速机构40传递到输出轴51、52。因此,一挡时的总传动比为:
19.i=i1*i
indi
=14~17.5
20.二挡时,第一离合器31接合,第二离合器32分离,转子轴13与第一离合器31直接联接,来自电机的动力经由第一离合器31和差速机构40传递到输出轴51、52。因此,二挡时的总传动比为:
21.i=i
indi
=5.5~7。
22.图2示出了根据本实用新型的另一个实施例的用于机动车辆的电驱动装置。图2示出的实施例与图1示出的实施例的不同之处在于,在图2示出的实施例中,行星齿轮机构20的齿圈与转子轴13联接,太阳轮相对于主壳体10固定,并且载架联接到切换机构30。
23.根据图2的电驱动装置,减速机构20的传动比可以被设定为i1=(1+α)/α=1.25~1.75,其中α=zr/zs,zr为齿圈的齿数,zs为太阳轮的齿数,周转差速器40的传动比被设定为i
indi
=5.5~9.6。
24.根据图2的电驱动装置能够实现两挡变速,具体如下文所解释:
25.一挡时:第一离合器31分离,第二离合器32接合,行星载架联接到差速器40的输入轴41,来自电机的动力经由减速机构20、第二离合器32和差速机构40传递到输出轴51、52。因此,一挡时的总传动比为:
26.i=i1*i
indi
=6.9~17
27.二挡时:第一离合器31接合,第二离合器32分离,转子轴13与第一离合器31直接联接,来自电机的动力经由第一离合器31和差速机构40传递到输出轴51、52。因此,二挡时的总传动比为:
28.i=i
indi
=5.5~9.6
29.与图1的实施例相比,图2中的实施例在一挡时,即,来自电机的动力经由减速机构20、第二离合器32和差速机构40传递到输出轴51、52时,整个装置的总传动比为i=i1*i
indi
=6.9~17。该总传动比更加宽,变速范围更大。
30.另外,由于动力经由行星齿轮机构20的齿圈输入,经由行星载架输出,所以行星齿轮机构20的传动比被设定为较小,即i1=1.25~1.75,这使得周转差速器40的传动比可以被设定为较大,即i
indi
=5.5~9.6。因此,行星齿轮机构20可以被设计成与周转差速器40共用相同的部件,即行星齿轮机构与周转差速器40共用相同规格的行星轮。这使得整个电驱动装置节省材料成本。
31.在以上描述的实施例中,差速机构40被布置成使得差速机构40的两个输出轴51、52与转子轴13同轴布置,即输出轴中的一个输出轴51延伸穿过中空的转子轴13。然而,本实用新型不限于此,差速机构40可以被布置成使得差速机构40的两个输出轴51、52与转子轴13平行但是不同轴。
32.在以上描述的实施例中,切换机构30与差速机构40的输入轴41联接。然而,本实用新型不限于此,切换机构30可以通过本领域技术人员熟知的其它方式将动力传递到差速机构40。
33.在以上描述的实施例中,差速机构40被示出为周转差速器,然而本实用新型的差速机构40不限于周转差速器,差速机构40也可以是常规的圆锥齿轮式差速器。
34.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1