折叠爬梯装置的制作方法
1.本实用新型属于农业领域,具体地说是一种折叠爬梯装置。
背景技术:
2.随着农业机械化的发展,收获机已经比较广泛的得到应用,并且车型上正在逐步向短小紧凑型发展。
3.收获机的车身侧面设置有用于操作者攀爬的爬梯,相关技术中,爬梯主要有旋转式和固定式:旋转式爬梯结构复杂、占用空间大,制造成本高,在紧凑型收获机上不容易实现;固定式爬梯一旦经过腐蚀或重物破坏,使爬梯产生变形而需更换时,只能通过切除、再焊,操作费时费力,并且影响整车宽度,在收获和行走过程中不易通过较窄路面,且由于踏板有伸出,在进行车辆检修时易擦伤,安全度低且更换不便,若为了控制车身宽度而减小爬梯踏板宽度,则操作人员攀爬或停留过程中易重心不稳,造成事故。
技术实现要素:
4.为解决现有技术中存在的以上不足,本实用新型旨在提供一种折叠爬梯装置,以达到在不使车身加宽的前提下设置爬梯的目的。
5.为实现上述目的,本实用新型所采用的技术方案如下:一种折叠爬梯装置,包括固定设置的梯架,和回转设置于梯架上的若干个踏板,所述各踏板之间均通过连杆依次相连,所述若干个踏板包括远离地面一端的主动踏板,和设置于主动踏板下方的若干个从动踏板,通过主动踏板的回转运动,带动从动踏板的回转运动,实现若干个踏板的折叠和展开,所述主动踏板连接有驱动杆,所述驱动杆的中部通过驱动轴与所述主动踏板相连,并在所述驱动杆的其中一个端部设置有拉簧,另一个端部设置有用于使驱动杆绕驱动轴转动的活动顶杆,通过活动顶杆使驱动杆转动,从而带动主动踏板做回转运动。
6.作为对本实用新型的限定:所述活动顶杆设置于固定设置的顶杆座上,所述顶杆座包括沿竖直方向设置的竖直部,和设置于竖直部两端的沿水平方向设置的水平部,所述顶杆贯穿水平部设置,并在所述两水平部之间设置有弹簧,所述弹簧的下端与下方的水平部相接触,所述顶杆上设置有限位凸起,所述弹簧的上端与顶杆的限位凸起相接触,通过弹簧的弹力使限位凸起与上方的水平部相接触。
7.作为对本实用新型的限定:所述主动踏板做回转运动的轴为主动轴,所述梯架上设置有用于定位主动踏板展开状态的定位部。
8.作为对本实用新型的限定:所述梯架包括相互平行设置的两个杆体,所述两个杆体之间通过连接部固定,主动踏板和从动踏板均设置于两个杆体之间,所述两个杆体均包括竖直杆和设置于竖直杆上端部的水平杆。
9.作为对本实用新型的进一步限定:所述主动踏板设置有驱动轴的一侧为固定侧,远离驱动轴的一侧为转动侧,所述驱动杆朝向主动踏板转动侧的一端设置有拉簧,远离主动踏板转动侧的一端设置有活动顶杆,且活动顶杆设置于驱动杆的上方。
10.作为对本实用新型的进一步限定:所述从动踏板靠近梯架一端与梯架转动连接,转动连接处为从动踏板做回转运动的轴,所述连杆连接于各从动踏板的中部,通过连杆带动从动踏板的中部运动,使从动踏板绕轴做回转运动。
11.作为对本实用新型的进一步限定:所述主动踏板转动设置于两水平杆之间,所述从动踏板转动设置于两竖直杆之间。
12.作为对本实用新型的再进一步限定:所述拉簧的其中一端连接于驱动杆朝向主动踏板转动侧的一端,所述拉簧的另一端固定设置,且与驱动轴的设置高度相同,使主动踏板为展开状态时,拉簧为拉紧受力状态。
13.由于采用了上述技术方案,本实用新型与现有技术相比,所取得的有益效果在于:
14.(1)本实用新型设置有主动踏板和从动踏板,主动踏板与从动踏板之间均通过连杆相连,通过控制主动踏板即可使若干个从动踏板随之转动,实现踏板的折叠和展开,当需要使用踏板时将其展开即可使用,当使用完毕后将踏板折叠,不会影响车身宽度,并且踏板之间可拆卸,便于更换,结构设计简单巧妙;
15.(2)本实用新型通过驱动杆控制主动踏板转动,驱动杆的转动由活动顶杆触发,活动顶杆在弹簧结构的作用下处于顶起状态,当操作人员沿爬梯爬至机身后需要将爬梯收起时,只需踩下顶杆,即可使顶杆下移,使驱动杆转动,进而收起主动踏板和从动踏板,该收起过程为全机械过程,操作简单,无需用电,运转可靠成本低;
16.(3)本实用新型驱动杆朝向主动踏板转动侧的一端设置有拉簧,当踏板为展开状态时,驱动杆沿水平方向设置,此时拉簧的受力方向与驱动杆的伸出方向几乎平行,不会影响踏板的展开状态,而当踩下顶杆使驱动杆转动一角度后,拉簧与驱动杆也呈一角度,在拉簧的拉力下使驱动杆继续旋转直至踏板全部收起折叠,在拉簧的作用下,使踏板只能保持展开和折叠状态。
17.综上所述,本实用新型在不影响车身宽度的前提下设置了爬梯,且操作简单无需用电,运转可靠成本低,适用于所有需要设置爬梯的收获机或结构。
附图说明
18.下面结合附图及具体实施例对本实用新型作更进一步详细说明。
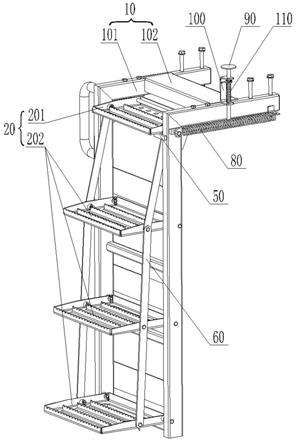
19.图1为本实用新型实施例展开状态的立体结构示意图;
20.图2为本实用新型实施例折叠状态的立体结构示意图;
21.图3为本实用新型实施例的翻转原理示意图;
22.图4为转轴固定板的立体结构示意图。
23.图中:10-梯架,101-杆体,102-连接部,20-踏板,201-主动踏板,202-从动踏板,30-驱动轴,40-转轴固定板,50-定位部,60-连杆,70-驱动杆,80-拉簧,90-活动顶杆,100-顶杆座,1001-竖直部,1002-水平部,110-弹簧。
具体实施方式
24.以下结合附图对本实用新型的优选实施例进行说明。应当理解,此处所描述的折叠爬梯装置为优选实施例,仅用于说明和解释本实用新型,并不构成对本实用新型的限制。
25.本实用新型所述的“上”“下”“左”“右”等方位用词或位置关系,是基于本实用新型
说明书附图的方位关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗指的装置或元件必须具有的特定的方位、为特定的方位构造和操作,因此不能理解为对本实用新型保护的内容的限制。
26.实施例折叠爬梯装置
27.本实施例如图1~图4所示,为一种折叠爬梯装置,包括梯架10和设置在梯架10上的若干个踏板20。
28.梯架10根据需要,可固定设置于收获机的机身一侧,或在收获机的两侧均固定设置,当然,梯架10也可固定设置于除收获机之外的其他需要爬梯的结构上,不以本实施例为限制。梯架10包括相互平行设置的两个杆体101,两个杆体101之间通过沿水平方向设置的连接部102固定,连接部102可以设置一个,也可以根据需要设置多个。两个杆体101均包括沿竖直方向的竖直杆和设置于竖直杆上端部的,沿水平方向设置的水平杆,使每个杆体101成为倒“l”形状,收获机的机身即设置于该倒“l”形状所呈的夹角中。
29.在两个杆体101之间设置有若干个踏板20,该若干个踏板20包括远离地面一端的主动踏板201,和设置于主动踏板201下方的若干个从动踏板202,本实施例中设置有一个主动踏板201,主动踏板201设置于两水平杆之间,还设置有三个从动踏板202,从动踏板202设置于两竖直杆之间。为了进一步减轻重量,降低成本,踏板20可以使用模具冲压成型。
30.主动踏板201和从动踏板202均转动设置于两个杆体101之间,即主动踏板201和从动踏板202均具有固定侧和转动侧。在主动踏板201靠近收获机的机身一侧设置有贯穿主动踏板201的驱动轴30,使主动踏板201能够绕驱动轴30旋转,驱动轴30通过转轴固定板40设置在两水平杆之间,设置有驱动轴30的一侧为主动踏板201的固定侧,在梯架10上与主动踏板201转动侧相对应的位置设置有定位部50,定位部50的高度与驱动轴30的高度相等,使主动踏板201旋转至定位部50后停止,并使主动踏板201在定位部50的作用下保持水平状态。在从动踏板202靠近收获机的机身一侧即靠近梯架10一端,设置有贯穿从动踏板202的转动轴,转动轴的端部与两杆体101相连,转动连接处为从动踏板202做回转运动的轴,使从动踏板202能够绕转动轴旋转。各踏板20之间均通过连杆60依次相连,连杆60设置于踏板20的两侧,连杆60的长度等于相应两踏板20之间的间距,主动踏板201和从动踏板202的连杆60均设置于靠近转动侧的一端或踏板20的中部,即当主动踏板201绕固定侧做回转运动时,从动踏板202在连杆60的作用下也做相应的回转运动,实现若干个踏板20的折叠和展开。并且当主动踏板201在定位部50的作用下保持水平时,从动踏板202也在连杆60的作用下不再旋转,保持水平,便于操作人员踩踏。
31.为了控制主动踏板201和从动踏板202的展开或收起,主动踏板201的驱动轴30一侧向外延伸,与设置在杆体101外的驱动杆70相连,通过驱动杆70的转动控制主动踏板201的驱动轴30转动,进而控制主动踏板201和从动踏板202的转动。
32.驱动杆70的中部通过驱动轴30与主动踏板201相连,该驱动杆70的中部即为驱动杆70的回转中心,在驱动杆70朝向主动踏板201转动侧的一端设置有拉簧80,拉簧80的另一端固定设置于相应的水平杆上,且与驱动轴30的设置高度相同,使主动踏板201为展开状态即驱动杆70为水平状态时,拉簧80为拉紧受力状态,此时拉簧80的受力方向与驱动杆70的伸出方向几乎平行,使踏板20保持展开状态。当驱动杆70转动一角度后,拉簧80与驱动杆70也呈一角度,在拉簧80的拉力下使驱动杆70继续旋转直至踏板20全部收起,使踏板20保持
折叠状态。
33.如图3所示(为了使相关的结构表达更加清楚,图3中省略了相应的梯架10结构),在驱动杆70的另一个端部即主动踏板201转动侧的一端,设置有用于使驱动杆70绕驱动轴30转动的活动顶杆90,通过活动顶杆90使驱动杆70发生转动。活动顶杆90为杆状,为了增大受力面积,活动顶杆90的顶端设置有圆形帽,活动顶杆90通过固设于相应水平杆上的顶杆座100,设置于驱动杆70的上方,顶杆座100包括沿竖直方向设置的竖直部1001,和设置于竖直部1001两端的沿水平方向设置的水平部1002,顶杆贯穿两水平部1002设置,并在两水平部1002之间设置有弹簧110,弹簧110的下端与下方的水平部1002相接触,顶杆上设置有限位凸起,弹簧110的上端与顶杆的限位凸起相接触,通过弹簧110的弹力使限位凸起与上方的水平部1002相接触,使顶杆处于顶起状态,此时的弹簧110为压缩状态。当操作人员沿爬梯爬至机身后需要将爬梯收起时,下压顶杆使顶杆下移,下移的顶杆触碰驱动杆70后向驱动杆70施加向下的力,使驱动杆70转动,当驱动杆70发生转动时,带动主动踏板201的驱动轴30转动,使主动踏板201旋转,进而收起主动踏板201和从动踏板202。
34.当需要使踏板20展开时,用手向下掰动主动踏板201或从动踏板202的转动侧,使主动踏板201和从动踏板202一起向下转动,当主动踏板201转动至定位部50时转动停止,主动踏板201和从动踏板202保持水平。当需要使踏板20收起时,下压下压顶杆使驱动杆70转动,带动主动踏板201转动,收起主动踏板201和从动踏板202。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1