一种两栖三模态飞行吸附爬壁机器人
1.本发明属于特种机器人领域,具体涉及一种两栖三模态飞行吸附爬壁机器人,能够完成空中和壁面两栖运动,具有空中飞行、壁面爬行、壁面吸附三种模态的飞行吸附爬壁机器人。
背景技术:
2.在现代军事国防领域和公共安全领域,越来越多的机器人执行侦察、监视、探测等较为危险的特殊任务,对于能够在空中、地面和建筑物外表面进行多维复杂空间运动的飞行吸附爬壁机器人也有了更为广泛的需求。
3.美国斯坦福大学的morgan t.pope团队研制成功了一种可以在空中飞行和垂直壁面爬行的机器人scamp(参见参考文献[1]pope m,kimes c,jiang h,et al.a multimodal robot for perching and climbing on vertical outdoor surfaces[j].ieee transactions on robotics:a publication of the ieee robotics and automation society,2017,33(1):38-48.)。利用仿生微棘结构攀附在粗糙的建筑物外墙上,通过微电机驱动足部伸缩实现壁面的爬行。然而其爬行不够灵活,爬行过程无法转弯,同时对壁面的适应性也不够强。
[0004]
中国专利cn111591095a公开了一种可栖息的多旋翼飞行爬壁机器人,既可以实现爬壁功能又可以实现飞行功能,并且可以在两者之间进行快速转换。利用四旋翼实现空间的自由飞行,爬壁时利用旋翼方向的倾转提供使机器人紧贴壁面的吸附力。然而其在垂直壁面的爬行过程中,旋翼始终需要保持高速运转以提供足够的吸附力,需要消耗较多的能量,并不能提供较长的运行时间;且该申请中是采用吸盘进行墙面吸附,需要通过真空泵实现真空吸盘的吸附,附加组件多且吸附和分离时的控制繁杂。
[0005]
中国专利cn105799805b公开了一种模块化的飞行爬壁机器人,通过飞行模块、吸附模块、爬壁行走模块和控制模块之间的组合实现空中飞行和不同壁面的爬行运动能力。但多种模块之间的组合会使得机器人的系统复杂程度变高,不利于实现很高的稳定性和可靠性,同时对于不同的壁面应用不同的吸附爬行方式和模块,也会带来模块更换的问题,使机器人对于复杂场景应用的适应性变差。且该申请中是真空吸盘或电磁铁进行墙面吸附,附加组件多且吸附和分离时的控制繁杂。
技术实现要素:
[0006]
要解决的技术问题:
[0007]
基于现有的关于飞行吸附爬壁机器人的研究和发明,存在对壁面环境的适应性不强或者壁面运行时间相比于空中飞行没有有效延长的缺点,本发明提出一种两栖三模态飞行吸附爬壁机器人,目的在于研制出一种能够适应复杂空中和壁面环境的运行,并且壁面运行的功率远低于空中飞行的功率,可以有效延长机器人续航时间的两栖三模态飞行吸附爬壁机器人。主要应用于城市复杂环境狭小空间的隐蔽侦察监视和对敌精准打击的任务,
应对城市反恐和作战的需要。
[0008]
本发明的技术方案是:一种两栖三模态飞行吸附爬壁机器人,包括飞行系统、壁面吸附系统、壁面爬行系统、控制系统和机载任务系统;壁面吸附系统、壁面爬行系统、控制系统和机载任务系统均固定于飞行系统的机架底板上,控制系统用于控制机器人在空中飞行、壁面吸附和壁面爬行的三个模态,机载任务系统通过摄像头和信号发射器将侦察内容传输到地面控制中心;其特征在于:所述飞行系统包括机架底板、动力电池、无刷电子调速器、无刷电机和螺旋桨;四个无刷电机相互对称安装于机架底板上,其输出轴上均安装有螺旋桨,产生的拉力方向垂直于机架底板向下;各无刷电机均通过无刷电子调速器与控制系统连接,实现对无刷电机启、停和转速的控制;动力电池连接到电子调速器的输入端为整个机器人的飞行系统提供能源;
[0009]
所述壁面吸附系统包括螺旋桨和设置于螺旋桨外围的吸盘,所述螺旋桨是与飞行系统共用的四个螺旋桨;所述吸盘为类涵道结构,其周壁沿轴向从底端到唇口为扩张结构,唇口外翻的轴向截面为圆心位于吸盘周壁外侧的凸圆弧段;吸盘的唇口表面设置有缝隙限定结构,用于限制吸盘与壁面的距离;所述吸盘的底端通过连接座与机架底板连接;通过螺旋桨运转在吸盘内形成低于大气压的负压空间,由于内外的压强差,在吸盘外表面形成垂直于壁面的压力,即使得机器人贴紧壁面;
[0010]
所述壁面爬行系统包括能够360
°
旋转的伺服舵机和爬行轮,两个伺服舵机对称安装于机架底板上,其输出轴分别安装有爬行轮;两个伺服舵机均与控制系统相连,通过控制系统控制两个伺服舵机的差速旋转,实现机器人在壁面的前进、后退和转向。
[0011]
本发明的进一步技术方案是:所述四个无刷电机采用x型四旋翼的布置方式配置位置和转向,横向和纵向的相邻无刷电机之间的轴距分别为螺旋桨直径的2.2倍和2.36倍,成对角的螺旋桨之间轴距为螺旋桨直径的3.23倍。
[0012]
本发明的进一步技术方案是:所述壁面吸附系统中,螺旋桨桨尖与吸盘之间的最小间隙控制为2.33%螺旋桨直径,吸盘的轴向高度为51%的螺旋桨直径,吸盘底端到桨盘的轴向距离为螺旋桨直径的30%,桨盘到吸盘唇口顶点的轴向距离为螺旋桨直径的21%.
[0013]
本发明的进一步技术方案是:所述吸盘的唇口轴向截面的凸圆弧半径为桨盘半径的0.3倍。
[0014]
本发明的进一步技术方案是:所述缝隙限定结构为半球形凸起,其轴向高度为浆盘直径的5%;壁面爬行模态下,两个爬行轮和四个吸盘的半球形凸起与爬行壁面相接触,能够控制机器人整体与壁面之间的间隙。
[0015]
本发明的进一步技术方案是:所述爬行轮由胎面和轮毂构成,胎面为橡胶材料,用于提供机器人在壁面运动时克服重力的摩擦力,并且在内层设置有海绵,用于壁面吸附和爬行过程中机器人的缓冲和减震;所述轮毂由木制层合板制成,并且固接在伺服舵机的舵盘上。
[0016]
本发明的进一步技术方案是:所述爬行轮与吸盘位于机架底板的同侧,爬行轮的直径为吸盘轴向高度的85%;且两个爬行轮之间的距离与成对角的两个螺旋桨的轴距相同。
[0017]
本发明的进一步技术方案是:所述控制系统包括飞行控制器、信号发射器和遥控信号接收器;飞行控制器用于控制机器人空中飞行模态下的飞行状态;信号发射器用于传
输机器人在运行过程中产生的关键数据;遥控信号接收器用于控制机器人的壁面爬行过程,控制信号由地面控制中心和飞行控制器共同给出;机器人运行过程中所需的传感器均集成在飞行控制器当中。
[0018]
本发明的进一步技术方案是:所述机载任务系统包括微型摄像头和无线图像传输发射器;微型摄像机安装在飞行系统的机架底板上,在空中飞行和壁面任务过程中采集对应目标的图像数据,再通过无线图像传输发射器将图像数据传输到地面控制中心,实现机器人的侦察任务。
[0019]
有益效果
[0020]
本发明的有益效果在于:本发明可以实现机器人空中飞行、壁面吸附和壁面爬行三种模态运动,并且由于本机器人的吸附系统不需要与壁面之间形成完全密闭的环境,因此可以适应玻璃、大理石、水泥等不同材质的建筑物外表面,可以在不同材质的壁面稳定的吸附,对复杂环境的适应能力强,应用范围广。
[0021]
本发明的机器人将四旋翼机器人的飞行能力与吸盘的壁面吸附能力集成在一个飞行平台上,使机器人可以实现空中和壁面两栖运动,并且空中和壁面运动使用同一套动力系统,机器人系统复杂程度低、可靠性高、壁面运动时间长。
[0022]
其中,壁面吸附系统中螺旋桨既提供飞行系统的飞行动力,同时也提供壁面吸附系统的吸附力,实现了一物多用,降低了系统复杂程度,减轻了机器人的总体重量。吸盘使用3d打印的方法制成,截面形状经过理论优化设计,扩大了唇口投影面积和截面外翻程度,在产生应有的附加升力的同时,大幅度提升了唇口在接近壁面情况下的附加吸附力。壁面吸附系统的吸附原理为基于负压和推力的复合吸附方式吸附,在机器人处于壁面吸附模态时,通过螺旋桨运转在吸盘内形成低于大气压的负压空间,由于内外的压强差,在吸盘外表面形成垂直于壁面的压力,即为使机器人贴紧壁面的主要吸附力。吸盘唇口还可以在机器人空中飞行时提供附加升力,进而提高飞行时的气动效率。
[0023]
本发明的机器人的壁面吸附系统使用负压吸附的方式,并且吸盘与壁面不需要完全接触和密闭,吸盘与壁面之间的间隙通过爬行轮和吸盘上的凸起限制在5%螺旋桨直径,这个缝隙的存在可以提高吸盘内气体流动的速度,进而提高机器人壁面吸附时的吸附力;同时使机器人与壁面的接触面积很小,壁面运动不受壁面材料和壁面平整度等的限制,系统鲁棒性强,使机器人有更多的应用环境。
[0024]
本发明的机器人壁面爬行过程使用两轮爬行的方式,两个爬行轮差动控制,并且轮距大于左右旋翼之间的距离,使机器人的壁面移动不会出现倾覆不可控的现象,两轮差速运动灵活,最大爬行速度为0.5m/s,两轮运动控制上简单可靠,爬行能力强。具体的为了保证伺服舵机的扭矩足够提供机器人壁面运动的动力,爬行轮的直径设计为85%的吸盘竖直安装高度;为了保证机器人在模态转换过程和壁面爬行过程中姿态的稳定,两个爬行轮之间的距离与对角旋翼的轴距相同。
[0025]
本发明的机器人样例经过仿真分析得到空中飞行时消耗的功率约为600瓦、壁面吸附时消耗的功率约为40瓦,壁面吸附过程消耗的功率仅为空中飞行过程的1/15,说明利用本发明的壁面吸附系统吸附方式可以降低壁面吸附过程的运行功率,有效的延长机器人执行任务的时间,克服了多旋翼无人机在续航时间方面的不足。
[0026]
本发明的机器人空中飞行采用四旋翼的构型方式,飞行运动灵活,结构紧凑,适合
在狭小空间中应用,同时结构和系统简单可靠,易于实现。
[0027]
本发明的机器人将四旋翼飞行器与特殊截面形状的吸盘相结合,设计出了可以实现两栖运动、三种模态的空中壁面多用途机器人,具有较强的可实现性和实用性。
[0028]
本发明的飞行吸附爬壁机器人,克服了现有研究和发明适应性不强或续航时间短的缺点,可以实现空中和壁面多种复杂环境的灵活运动,任务时间得到有效延长,同时系统简单可靠,应用范围广。
附图说明
[0029]
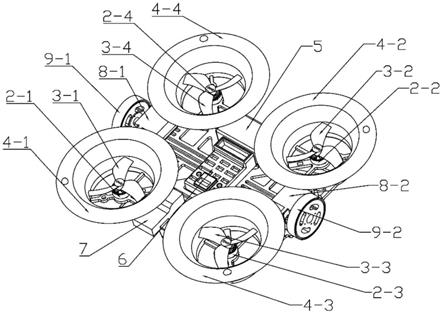
图1为本发明整体结构正面示意图;
[0030]
图2为本发明整体结构背面示意图;
[0031]
图3为本发明飞行系统组成示意图;
[0032]
图4为本发明壁面吸附系统组成示意图;
[0033]
图5为本发明壁面吸附系统的结构尺寸图;
[0034]
图6为本发明壁面爬行系统组成示意图;
[0035]
图7为本发明控制系统组成示意图;
[0036]
图8为本发明机器人的飞行系统的构型示意图;
[0037]
图9为本发明机器人的壁面吸附模态转换过程示意图;
[0038]
图10为本发明机器人的壁面爬行过程模型简化示意图;
[0039]
附图标记说明:1.机架底板,2-1、2-2、2-3、2-4.无刷电机,3-1、3-2、3-3、3-4.螺旋桨,4-1、4-2、4-3、4-4.吸盘,5.动力电池,6.飞行控制器,7.遥控信号接收器,8-1、8-2.伺服舵机,9-1、9-2.爬行轮,10.四合一无刷电子调速器,11-1、11-2、11-3、11-4.机架支撑腿,12.微型摄像头,13.无线图像传输发射器,14.吸盘表面凸起,15.伺服舵机固定底板16.伺服舵机安装片17.伺服舵机安装片,18.伺服舵机安装顶板,19.伺服舵机舵盘,20.爬行轮轮毂,21.爬行轮胎面。
具体实施方式
[0040]
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0041]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0042]
下面结合附图1-9和具体实施方式对本发明的样例进行详细说明。
[0043]
参考图1、图2,本发明一种两栖三模态飞行吸附爬壁机器人,包括飞行系统、壁面吸附系统、壁面爬行系统、控制系统和机载任务系统;壁面吸附系统、壁面爬行系统、控制系统和机载任务系统均固定于飞行系统的机架底板上,控制系统用于控制机器人在空中飞行、壁面吸附和壁面爬行的三个模态,机载任务系统通过摄像头和信号发射器将侦察内容传输到地面控制中心;
[0044]
所述飞行系统包括机架底板1、动力电池6、无刷电子调速器10、无刷电机2-1、2-2、2-3、2-4和螺旋桨3-1、3-2、3-3、3-4;四个无刷电机相互对称安装于机架底板1上,其输出轴上均安装有螺旋桨,产生的拉力方向垂直于机架底板向下;四个无刷电机采用x型四旋翼的布置方式配置位置和转向,横向和纵向的相邻无刷电机之间的轴距分别为螺旋桨直径的2.2倍和2.36倍,成对角的螺旋桨之间轴距为螺旋桨直径的3.23倍。无刷电机出线端的三根线按顺序分别焊接在无刷电子调速器的输出端,使用四合一的无刷电子调速器,体积小、质量轻、结构紧凑;四合一无刷电子调速器的四个信号线连接到控制系统,实现对无刷电机启、停和转速的控制;动力电池连接到电子调速器的输入端为整个机器人的飞行系统提供能源;
[0045]
参照图3、4所示,所述壁面吸附系统包括螺旋桨和设置于螺旋桨外围的吸盘,所述螺旋桨是与飞行系统共用的四个螺旋桨,螺旋桨既提供飞行系统的飞行动力,同时也提供壁面吸附系统的吸附力,实现了一物多用,降低了系统复杂程度,减轻了机器人的总体重量。所述吸盘为类涵道结构,其周壁沿轴向从底端到唇口为扩张结构,唇口外翻的轴向截面为圆心位于吸盘周壁外侧的凸圆弧段;吸盘使用3d打印的方法制成,截面形状经过理论优化设计,扩大了唇口投影面积和截面外翻程度,在产生应有的附加升力的同时,大幅度提升了唇口在接近壁面情况下的附加吸附力。
[0046]
参照图5所示,吸盘的唇口表面设置有缝隙限定结构,用于限制吸盘与壁面的距离;所述吸盘的底端通过连接座与机架底板连接;通过螺旋桨运转在吸盘内形成低于大气压的负压空间,由于内外的压强差,在吸盘外表面形成垂直于壁面的压力,即使得机器人贴紧壁面;所述缝隙限定结构为半球形凸起,其轴向高度为浆盘直径的5%;壁面爬行模态下,两个爬行轮和四个吸盘的半球形凸起与爬行壁面相接触,能够控制机器人整体与壁面之间的间隙。
[0047]
所述壁面爬行系统包括能够360
°
旋转的伺服舵机8-1、8-2和爬行轮9-1、9-2,两个伺服舵机对称安装于机架底板1上,其输出轴分别安装有爬行轮;两个伺服舵机均与控制系统相连,通过控制系统控制两个伺服舵机的差速旋转,实现机器人在壁面的前进、后退和转向。
[0048]
所述爬行轮与吸盘位于机架底板1的同侧,爬行轮的直径为吸盘轴向高度的85%;且两个爬行轮之间的距离与成对角的两个螺旋桨的轴距相同。所述爬行轮由胎面和轮毂构成,胎面为橡胶材料,用于提供机器人在壁面运动时克服重力的摩擦力,并且在内层设置有海绵,用于壁面吸附和爬行过程中机器人的缓冲和减震;所述轮毂由木制层合板制成,并且固接在伺服舵机的舵盘上。
[0049]
所述控制系统包括飞行控制器、信号发射器和遥控信号接收器。飞行控制器用于控制机器人空中飞行模态下的飞行状态;信号发射器用于传输机器人在运行过程中产生的关键数据;遥控信号接收器用于控制机器人的壁面爬行过程,控制信号由地面控制中心和飞行控制器共同给出;机器人运行过程中所需的传感器均集成在飞行控制器当中。
[0050]
所述机载任务系统包括微型摄像头和无线图像传输发射器。微型摄像机安装在飞行系统的机架底板上,在空中飞行和壁面任务过程中采集对应目标的图像数据,再通过无线图像传输发射器将图像数据传输到地面控制中心,实现机器人的侦察任务。
[0051]
实施例:
[0052]
参考图3,本发明的飞行系统中,四旋翼机架为x型构型,机架底板可以使用环氧树脂基碳纤维复合材料层合板制成,四个无刷电机通过螺钉分别安装在机架底板的对应位置,对应的螺旋桨通过螺钉固定在无刷电机的转子上,无刷电机的电源线穿过机架底板对应的孔位焊接在无刷电子调速器上,无刷电子调速器通过胶接的方式固定在机架底板的背面,正负极输入电源线穿过机架底板的减重孔与动力电池相连,动力电池安置在机架底板的正面,并通过轧带固定。
[0053]
参考图4,本发明的壁面吸附系统中,吸盘在3d打印时预留的开槽与机架底板加强筋的位置相对应,通过开槽与机架底板的配合限制吸盘与无刷电机的相对位置,以确保吸盘内壁面与螺旋桨桨尖的间隙符合2.33%螺旋桨直径的设计要求,吸盘通过胶接的方式固定在机架底板上,吸盘的上表面设计有一个半球形的高度为5%螺旋桨直径的半球形凸起14,通过该半球形凸起可以控制吸盘上表面与吸附壁面之间的缝隙,使得吸盘的吸附效率保持在最佳。
[0054]
参考图5,本发明的吸盘和螺旋桨的尺寸和位置相对关系如图所示,螺旋桨直径为d,螺旋桨与涵道内壁之间的间隙s为2.33%d,螺旋桨桨盘截面与吸盘底面的高度差h1为21%d,吸盘的全高h为51%d,吸盘唇口位置的半球形凸起高度h为5%d,吸盘的收缩段和扩张段的长度分别为21%d和30%d,吸盘唇口的最大半径r为92.5%d,吸盘出口的最小半径r为48.5%d。
[0055]
参考图6,本发明的壁面爬行系统中,伺服舵机固定底板15,伺服舵机安装片16、17、18通过螺钉将伺服舵机固定在机架底板上,伺服舵机舵盘19与轮毂20通过自攻螺钉固联并利用螺钉连接在伺服舵机的对应位置,胎面21通过胶接的方式粘接在轮毂表面。
[0056]
参考图7,本发明的控制系统中,飞行控制器粘接固定在机架底板正中间的位置,即机器人几何中心的位置上,并通过信号线与无刷电子调速器和遥控信号接收器之间传输数据,遥控信号接收器粘接在机架底板的前侧位置上。
[0057]
具体的根据以上的设计情况,利用基本的四旋翼构型完成本发明的机器人的空中飞行、壁面吸附、壁面爬行的三种模态的运动,所需的具体控制方法如下:
[0058]
参考图8,本发明的机器人的飞行系统使用“x”型四旋翼的构型,其中对角线的两个旋翼顺时针旋转,另外两个旋翼逆时针旋翼,通过四个旋翼转速的改变实现对机器人空中稳定飞行的控制。
[0059]
参考图9,本发明的机器人的壁面吸附模态转换过程通过机器人的大机动动作实现,利用类似多旋翼飞行器大角度前飞的运动实现机器人的姿态由水平状态转变为平行于壁面的垂直状态,实现机器人的壁面吸附过程。
[0060]
参考图10,本发明的机器人的壁面爬行过程通过机器人左右爬行轮的差动旋转运动实现,通过遥控信号接收器接收到的混合控制信号控制伺服舵机的旋转。
[0061]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1