车辆控制装置、车辆控制方法、以及车辆控制系统与流程
1.本发明涉及车辆控制装置、车辆控制方法、以及车辆控制系统。
背景技术:
2.专利文献1所公开的车辆的转向控制装置,基于行驶车道信息和本车辆的行驶状态来设定前方注视点距离,基于该前方注视点距离和本车辆的行驶状态,计算用于使本车辆沿着行驶车道跟随行驶的第1反馈增益,基于第1反馈增益和稳定性参数,计算用于补正当前点中的本车辆的横向位移的第2反馈增益,使用第1反馈增益、第2反馈增益、前方注视点横向位移和当前点横向位移来计算目标偏航率,基于该目标偏航率来计算本车辆的转向角。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利特开2016-107658号公报
技术实现要素:
6.发明要解决的课题
7.然而,在认知以及判断车辆周围的状况等的认知判断部基于认知以及判断的结果来生成目标行驶轨道,控制车辆的运动的车辆控制部控制车辆的运动以使车辆沿着所述目标行驶轨道而行驶的系统的情况中,有由于目标行驶轨道有车辆的乘坐舒适度、舒适性受损的担忧。
8.本发明鉴于从前的实情,其目的为提供能实现车辆的乘坐舒适度、舒适性的提升的车辆控制装置、车辆控制方法、以及车辆控制系统。
9.用于解决课题的手段
10.根据本发明,在其1个方式中,作为具备基于输入的信息进行运算并输出运算结果的控制部的车辆控制装置,所述控制部取得由进行认知以及判断的认知判断部指示的目标指令,即车辆前方的第1行驶区域,并输出用于使所述车辆在所述第1行驶区域中,以基于与所述车辆的行驶有关的各要素的所述车辆的速度以及行驶轨道而行驶的控制指令,所述车辆在行驶于所述第1行驶区域中时,取得从所述认知判断部指示的目标指令,即在所述车辆前方具有与所述第1行驶区域部分重叠的区域的第2行驶区域,输出用于使所述车辆在所述第2行驶区域中,以基于与所述车辆的行驶有关的各要素的所述车辆的速度以及行驶轨道而行驶的控制指令。
11.发明效果
12.根据本发明,能实现车辆的乘坐舒适度、舒适性的提升。
附图说明
13.图1是表示车辆控制系统的框图。
14.图2是表示轨道跟随控制部的框图。
15.图3是表示目标指令的内容的一方式的图。
16.图4是表示目标指令的内容的一方式的图。
17.图5是表示目标行驶区域内的轨道加工的状态的图。
18.图6是表示基于路面信息的目标行驶轨迹以及目标车速的设定例的图。
19.图7是表示基于目标行驶区域的行驶轨道和车道中央的轨迹的区别的图。
20.图8是表示基于行驶轨道的曲率的区别的图。
21.图9是表示基于行驶轨道的偏航率的区别的图。
22.图10是表示基于行驶轨道的横向加速度的区别的图。
23.图11是表示基于行驶轨道的横向加加速度的区别的图。
24.图12是表示目标行驶区域的更新处理的图。
25.图13是表示目标行驶区域的基本设定的图。
26.图14是表示物体区域和目标行驶区域的相关的图。
27.图15是表示基于物体的状况变化的目标行驶区域的更新的图。
28.图16是表示物体的状况变化后的目标行驶区域的更新的图。
29.图17是表示超出车道而设定目标行驶区域的状态的图。
30.图18是表示碰撞风险区域(详细而言,闯出警戒区域)和目标行驶区域的相关的图。
31.图19是表示碰撞风险区域(详细而言,路肩的物体)和目标行驶区域的相关的图。
32.图20是表示目标行驶区域内存在多个物体的情况中的行驶轨道的设定的图。
33.图21是表示在目标行驶区域内存在物体和路面侧斜的情况中的行驶轨道的设定的图。
34.图22是表示在目标行驶区域内存在物体和低μ路面的情况中的行驶轨道的设定的图。
35.图23是表示将认知判断部所指示的推荐轨道设为行驶轨道的情况的图。
36.图24是表示认知判断部所指示的推荐轨道上的物体存在的情况的行驶轨道的图。
37.图25是表示在认知判断部所指示的推荐轨道上存在与乘坐舒适度等有关的恶化因素的情况的行驶轨道的图。
38.图26是用于说明作为包含车辆行驶的可能性的区域的目标行驶轨道的图。
39.图27是表示图26的地点i中的行驶可能性的设定状态的线图。
40.图28是表示图26的地点ii中的行驶可能性的设定状态的线图。
41.图29是表示图26的地点iii中的行驶可能性的设定状态的线图。
42.图30是具备搭载了2个微型计算机的1个控制单元的车辆控制系统的框图。
43.图31是在1个微型计算机中搭载了作为认知判断部的第1逻辑和作为控制部的第2逻辑的车辆控制系统的框图。
44.图32是表示针对2个微型计算机的功能分担的一方式的车辆控制系统的框图。
具体实施方式
45.以下,对本发明所涉及的车辆控制装置、车辆控制方法、以及车辆控制系统的实施
方式基于附图进行说明。
46.图1是表示车辆控制系统200的一方式的框图,车辆控制系统200是搭载于4轮汽车等车辆100并控制车辆100的运动的系统。
47.车辆控制系统200具备外界识别部300、车辆运动检测部400、自动驾驶控制单元500、车辆运动控制单元600、以及致动器部700。
48.另外,如后述,自动驾驶控制单元500是对车辆运动控制单元600赋予目标指令的上位单元,车辆运动控制单元600是从自动驾驶控制单元500取得目标指令的下位单元。
49.外界识别部300是用于取得车辆100的外界信息的装置。
50.外界识别部300具备例如gps(global positioning system,全球定位系统)接收部310、地图数据库320、路车间通信装置330、摄像机340、雷达350、lidar(light detection and ranging(光探测和测距)、laser imaging detection and ranging(激光图像探测和测距))360等。
51.gps接收部310通过从gps卫星接收信号来测量车辆100的位置的纬度以及经度。
52.地图数据库320形成于车辆100所搭载的存储装置内。
53.另外,地图数据库320的地图信息包含道路位置、道路形状、十字路口位置等信息。
54.路车间通信装置330将车辆100的信息发送给路侧单元,从路侧单元接收弯道、十字路口等道路交通信息。
55.另外,外界识别部300能具备从其他车辆取得道路交通信息、其他公司的行为信息等的通信装置。
56.摄像机340为立体摄像机、单目摄像机、全景摄像机等,拍摄车辆100的周围,取得车辆100周围的图像信息。
57.雷达350以及lidar360检测车辆100周围的物体,输出与检测的物体有关的信息。
58.车辆运动检测部400具备轮速传感器410、加速度传感器420等。
59.轮速传感器410是检测车辆100的各车轮的旋转速度的传感器,轮速传感器410的检测结果用于车辆100的速度的估计运算中。
60.另外,能够设置取代轮速传感器410或者与轮速传感器410一起检测车辆100的速度的车速传感器。
61.此外,加速度传感器420检测车辆100的前后加速度、横向加速度(换言之,左右加速度)、上下加速度、偏航率、俯仰率、侧倾率、横向加加速度等。
62.自动驾驶控制单元500以基于输入的信息进行运算并输出运算结果的微型计算机540为主体的电子控制装置,微型计算机540具备省略了图示的mpu(microprocessor unit,微处理器单元)、rom(read only memory,只读存储器)、ram(random access memory,随机访问存储器)等。
63.自动驾驶控制单元500的微型计算机540从外界识别部300取得车辆100的位置信息、道路形状信息、路面信息、物体信息等外界识别信号,此外,从车辆运动检测部400取得速度、加速度等车辆运动检测信号(换言之,车辆行为检测信号)。
64.然后,自动驾驶控制单元500的微型计算机540基于取得的信息计算目标指令,将计算的目标指令输出给车辆运动控制单元600。
65.自动驾驶控制单元500的微型计算机540具备作为软件的作为周边状况识别部
510、行动计划部520、目标生成部530的功能。
66.周边状况识别部510基于来自外界识别部300的外界识别信号以及来自车辆运动检测部400的车辆运动检测信号,识别本车辆周边的状况。
67.周边状况识别部510所识别的本车辆周边的状况包含例如道路的曲率、路面侧斜、路面坡度、路面的摩擦系数μ、左右的车道标记的位置、左右的路端位置、移动物体、以及静止物体等信息。
68.上述的移动物体是指例如、行人、自行车、摩托车、其他车辆等,上述的静止物体是指例如路上的掉落物、交通信号灯、护栏、路缘、道路标志、树木、招牌等。
69.行动计划部520取得周边状况识别部510中的识别结果,制作包含行驶车道的选择以及在十字路口、分支点的行进方向的选择等的、车辆100的行动计划。
70.然后,目标生成部530基于周边状况识别部510所识别、判断的本车辆周边的状况、以及行动计划部520制作的行动计划,来决定向车辆运动控制单元600输出的目标指令。
71.在这里,目标生成部530向车辆运动控制单元600指示的目标指令包含指示车辆100前方的行驶区域的指令。
72.即,自动驾驶控制单元500的微型计算机540基于外界识别部300取得的车辆100的外界信息对本车辆周边的状况进行认知和判断,输出作为目标指令的行驶区域的指示信息,相当于认知判断部。
73.车辆运动控制单元600与自动驾驶控制单元500相同地,是以基于输入的信息进行运算并输出运算结果的微型计算机630为主体的电子控制装置,微型计算机630具备省略了图示的mpu、rom、ram等。
74.车辆运动控制单元600的微型计算机630是具有作为控制部的功能的车辆控制装置。
75.控制部从自动驾驶控制单元500取得包含行驶区域的指示信息的目标指令,向致动器部700输出用于使车辆100以基于与车辆100的行驶有关的各要素的车辆100的速度以及行驶轨道行驶的控制指令。
76.在这里,与车辆的行驶有关的各要素是指使产生于车辆100的横向加速度或横向加加速度最小的物理量。
77.车辆运动控制单元600的微型计算机630具备作为软件的作为轨道加工部610、轨道跟随控制部620的功能。
78.轨道加工部610在由自动驾驶控制单元500指示的行驶区域内生成本车辆的目标行驶轨道,并且设定目标车速。
79.在这里,例如,轨道加工部610设定目标行驶轨道以及目标车速,作为在由自动驾驶控制单元500指示的行驶区域内使横向加速度或横向加加速度尽可能地小的(换言之,使横向加速度或横向加加速度最小的)行驶轨道、车速。
80.此外,轨道加工部610在由自动驾驶控制单元500指示的行驶区域内存在物体的情况下,求取车辆100避开物体而行驶的路线作为目标行驶轨道。
81.轨道跟随控制部620运算用于使车辆100跟随于轨道加工部610设定的目标行驶轨道以及目标车速的控制指令,即,转向指令、加速或减速指令,并将运算的控制指令输出给致动器部700。
82.致动器部700包含产生车辆100的驱动力的内燃机构710、电机720以及为车辆100赋予制动力的制动装置730、用于改变车辆100的行进方向的电子控制动力转向装置740、能调整阻尼力、车高的电子控制悬架750等。
83.另外,能够使电机720作为发电机运转而使制动力(换言之,再生制动力)作用于车辆100。
84.致动器部700基于来自轨道跟随控制部620的控制指令而产生驱动力、制动力、转向力等。
85.图2是表示轨道跟随控制部620的细节的框图。
86.轨道跟随控制部620具有自身位置估计部621、曲率运算部622、最近切点运算部623、姿态角运算部624、相对位置运算部625、致动器指令部626。
87.自身位置估计部621,例如,基于从车辆运动检测部400取得的轮速、偏航率、前后加速度、横向加速度等的积分值,通过所谓的航位推算来估计车辆100的位置。
88.曲率运算部622运算轨道加工部610所设定的目标行驶轨道的曲率以及曲率变化。
89.最近切点运算部623求取目标行驶轨道上离车辆100的位置最近的点,即最近切点。
90.姿态角运算部624基于通过曲率运算部622运算的目标行驶轨道的曲率以及曲率变化,运算为了在通过最近切点运算部623运算的最近切点中,使车辆100的行进方向与最近切点的偏航角、即目标轨道的切线方向一致而必要的车辆100的姿态角。
91.姿态角是车辆100的行进方向和车辆100的前后轴方向所成的角度。
92.相对位置运算部625,由最近切点运算部623所运算的最近切点相对于运算自身位置估计部621所估计的本车辆的位置的相对位置。
93.然后,致动器指令部626基于由姿态角运算部624运算的姿态角来补正最近切点的偏航角,生成用于以目标车速以及补正后的偏航角通过最近切点的转向指令和加速或减速指令,将生成的指令向致动器部700输出。
94.致动器指令部626输出的转向指令包含例如偏航率指令、左右位置指令、以及偏航角指令等。
95.自动驾驶控制单元500能够将对车辆运动控制单元600指示的行驶区域指示为道路中的左右的车道标记(换言之,白线)之间、或道路中的左右的路端之间。
96.换言之,自动驾驶控制单元500能够将从车道标记之间等识别的车道内的区域设为基本的行驶区域。
97.此外,自动驾驶控制单元500在从车道标记之间等识别到的车道内存在任意物体的情况下,能够将行驶区域指示作为除了该物体以外的区域。
98.上述的物体是指例如停车车辆、前行车、对面车、掉落物、设置物、树木、电线杆、行人、招牌等。
99.此外,例如,自动驾驶控制单元500,能够警戒从物体的阴影处的闯出等,并将物体的阴影处等设定为碰撞风险区域,将行驶区域指示作为除了有关碰撞风险区域以外的区域。
100.此外,自动驾驶控制单元500能够在车辆100的前方存在不能识别的区域的情况下,将行驶区域指示作为除了有关区域以外的区域。
101.进一步地,自动驾驶控制单元500能够使对车辆运动控制单元600输出的目标指令中包含路面信息、物体信息等。
102.在这里,路面信息是指路面摩擦系数μ、路面侧斜、路面倾斜、路面的起伏、路面的凸凹、减速带、坑洼等信息。
103.此外,物体信息是指位于行驶区域内的物体的信息,是与其他车辆、行人、障碍物、掉落物、招牌等物体有关的信息。
104.此外,自动驾驶控制单元500能够使对车辆运动控制单元600输出的目标指令中包含在行驶区域的规定位置处的车速、横向加速度、横向加加速度等的最大值或最小值的信息。
105.这种情况下,车辆运动控制单元600在由自动驾驶控制单元500指示的行驶区域内,求取使车辆100能够以由自动驾驶控制单元500指示的横向加速度、横向加加速度而行驶的目标行驶轨道。
106.图3是表示自动驾驶控制单元500向车辆运动控制单元600输出的目标指令的内容的一方式。
107.图3所例示的目标指令通过指示从车辆100的当前位置远离规定距离的位置的行驶区域的左端以及右端的位置信息的组合来指示行驶区域。
108.在这里,自动驾驶控制单元500将行驶区域的左端以及右端的位置信息的组合指示作为最低间隔或最低时间间隔的中的每个较长者的点,且将行驶区域的左端以及右端的位置信息的组合的总数确定作为与既定数、既定距离相当的数、或与既定时间相当的数。
109.此外,图3所示的例中,对指示行驶区域的左端以及右端的位置信息的每一个,附加有该位置信息所表示的地点的路面侧斜、路面倾斜、以及路面摩擦系数μ等路面信息。
110.然而,并不限定于行驶区域通过在同一位置的左端以及右端的位置信息来指示的结构,而是左端的位置信息和右端的位置信息能够作为互相不同的地点中的信息分别地被给予,换言之,行驶区域的指示信息能够设为左端的位置信息和右端的位置信息不同步的信息。
111.图4表示行驶区域的指示指令为左端的位置信息和右端的位置信息是互不相同的地点中的信息的情况下的目标指令的内容。
112.在这里,图4所示的目标指令,包含每个规定地点的最大速度、最低速度、最大横向加速度、最大横向加加速度等信息。
113.例如,最大速度为法定最高速度,最低速度为法定最低速度或用于不扰乱交通的流量的规定最低速度。
114.此外,例如,车辆100的最大横向加速度是基于车辆100的乘坐舒适度、在自动驾驶中容许的最大横向加速度等而设定的值,车辆100的最大横向加加速度是基于车辆100的乘坐舒适度等而设定的值。
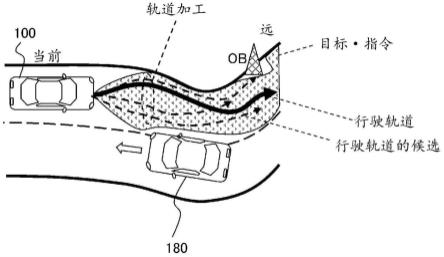
115.图5是例示在弯道道路中,自动驾驶控制单元500指示的行驶区域和车辆运动控制单元600设定的目标行驶轨道的图。
116.在图5中,斜线区域为自动驾驶控制单元500指示的行驶区域,自动驾驶控制单元500指示行驶区域作为从车道内开始,除了图中以三角表示的物体ob的区域以外的、还避开对面车180的区域。
117.在这里,车辆运动控制单元600在被指示的行驶区域内,使车辆100以基于与车辆100的行驶有关的各要素的车速和轨道来行驶。
118.从而,车辆运动控制单元600能够适当选定能够维持基于物体信息的安全性的轨道,且抑制了最大横向加加速度等的、乘坐舒适度高的速度、轨道。
119.此外,图6例示在自动驾驶控制单元500指示的行驶区域的信息中包含路面信息时,车辆运动控制单元600设定的目标车速、目标行驶轨道。
120.图6例示在直线道路中,在车辆100的前方的行驶区域中存在坑洼、减速带、起伏,且有关路面信息与行驶区域的指示一起从自动驾驶控制单元500被给与车辆运动控制单元600的情况中,基于车辆运动控制单元600的车辆行为的控制结果。
121.图6所示的例子的情况中,车辆运动控制单元600设定绕开坑洼的目标行驶轨道,此外,设定目标车速以使车辆100在减速带之前、以及在起伏之前减速,依据设定的目标行驶轨道以及目标车速来控制致动器部700。
122.若车辆100依据上述的目标行驶轨道以及目标车速而行驶,则能够防止在通过坑洼、减速带、起伏时产生很大的上下加速度(换言之,上下振动),可以改善车辆100的乘坐舒适度。
123.另外,车辆运动控制单元600,能够进行在坑洼前使车辆100加速的目标车速的设定来取代设定绕开坑洼的轨道。
124.通过在坑洼前使车辆100加速,能够防止车辆100的轮胎陷入坑洼中,抑制车辆100的上下加速度产生。
125.图7例示车辆运动控制单元600使车辆100在由自动驾驶控制单元500指示的行驶区域内,以让横向加速度或横向加加速度尽可能小的车速、轨道而行驶时的、弯道道路中的行驶轨道。
126.此外,图8-图11是表示使车辆100沿着跟随车道中央的目标行驶轨道而行驶时,以及使车辆100沿着使横向加加速度最小的目标行驶轨道而行驶时的行驶轨道的曲率、偏航率、横向加速度、横向加加速度的区别,即,表示车辆100的行为的区别的图。
127.为了使车辆100行驶在弯道道路时的横向加加速度变小,要求使车辆100的行驶轨道的曲率变小。
128.因此,车辆运动控制单元600在由自动驾驶控制单元500指示的行驶区域内设定使横向加加速度尽可能小的目标行驶轨道的情况下,在指示的行驶区域内设定目标行驶轨道以使行驶轨道的曲率尽量小,换言之,使车辆100行驶在更接近直线的线路上。
129.具体而言,在图7所示的左弯道的情况下,车辆运动控制单元600设定目标行驶轨道,以使车辆100从行驶区域的右边进入弯道,此后,以弯道的内侧为目标,在弯道的出口再次行驶在行驶区域的右边,换言之,成为外内外(out in out)的行驶线路。
130.通过有关目标行驶轨道的设定,如图8所示,与行驶在跟随车道中央的目标行驶轨道的情况相比,车辆100的行驶轨道的曲率(详细而言,曲率的最大值)变小。
131.然后,若行驶轨迹的曲率变小,则如图9所示,车辆100行驶在弯道道路时产生的偏航率变小,此外,如图10所示,车辆100行驶在弯道道路时产生的横向加速度变小,进一步地,如图11所示,车辆100行驶在弯道道路时产生的横向加加速度变小。
132.从而,在指示行驶区域的内设置使横向加速度或横向加加速度尽可能小的目标行
驶轨道的情况下,与车道中央被设定为目标行驶轨道的情况相比,实现车辆100的乘坐舒适度、舒适性的提升。
133.图12表示从自动驾驶控制单元500到车辆运动控制单元600的行驶区域的指示方法,换言之,表示行驶区域的指示信息的交接方法。
134.自动驾驶控制单元500在时刻t1的时间点对车辆运动控制单元600指示行驶区域(换言之,第1行驶区域),此后,在车辆100驶过指示的行驶区域之前,换言之,车辆100行驶在上一次指示的行驶区域中的时刻t2时,向车辆运动控制单元600指示下一个行驶区域(换言之,第2行驶区域)。
135.从而,自动驾驶控制单元500在时刻t2指示的行驶区域,具有与此前的时刻t1时指示的行驶区域部分重叠的区域。
136.进一步地,自动驾驶控制单元500在时刻t2的时间点指示了行驶区域后,在时刻t3指示下一个行驶区域,以后,相同地周期性地反复进行行驶区域的指示。
137.然后,车辆运动控制单元600依次取得来自自动驾驶控制单元500的行驶区域的信息,设定使横向加速度或横向加加速度尽可能小的目标行驶轨道,向致动器部700输出用于使车辆100沿着有关目标行驶轨道而行驶的控制指令。
138.在这里,自动驾驶控制单元500,车辆100在上一次指示的行驶区域行驶了规定时间后,对车辆运动控制单元600指示下一个行驶区域。
139.换言之,车辆运动控制单元600在车辆100在上一次指示的行驶区域行驶了规定时间后,取得具有与上一次指示的行驶区域部分重叠的区域的行驶区域。
140.另外,自动驾驶控制单元500在车辆100在上一次指示的行驶区域行驶了规定距离后,能够对车辆运动控制单元600指示下一个行驶区域。
141.此外,自动驾驶控制单元500运算基于时间的行驶区域的指示定时和基于行驶距离的行驶区域的指示定时,例如,能够在两者中更早的定时对车辆运动控制单元600指示新的行驶区域。
142.图13是表示基于自动驾驶控制单元500的基本行驶区域的制作方法的图。
143.自动驾驶控制单元500如图13所示,将车辆100的前方的道路中的左右的车道标记rl、rr之间,或车辆100的前方的道路中的左右的路端之间设定作为行驶区域。
144.图14是表示在作为左右的车道标记rl、rr而被设定的标准行驶区域内存在任意物体的情况下的、基于自动驾驶控制单元500的行驶区域的制作方法的图。
145.在标准行驶区域内存在任意物体的情况下,自动驾驶控制单元500将不包含该物体的区域,即,从标准行驶区域去掉物体区域的区域指示作为行驶区域。
146.图14所示的例子为其他车辆110从横道进入车辆100前方的车辆100要行驶的车道内(换言之,标准行驶区域内)的情况。
147.此时,自动驾驶控制单元500将从标准行驶区域去除存在其他车辆110的区域(即,物体区域)的区域作为行驶区域来对车辆运动控制单元600指示。
148.然后,车辆运动控制单元600通过在由自动驾驶控制单元500指示的行驶区域内设定目标行驶轨道,来使本车行驶在避开了其他车辆110的轨道中。
149.另外,自动驾驶控制单元500在物体正在移动的情况下,基于移动方向以及移动速度,能够变更从标准行驶区域去除的区域的大小。
150.此外,自动驾驶控制单元500在标准行驶区域内存在任意物体的情况下,能够对车辆运动控制单元600指示从标准行驶区域去除物体区域后的区域的信息,此外,能够指示标准行驶区域的信息、以及物体区域的信息(换言之,从标准行驶区域去除的区域的信息)。
151.图15以及图16是表示关于物体信息而规定的状况变化发生时的基于自动驾驶控制单元500的行驶区域的制作以及指示方法的图。
152.如图13所示,假定在标准行驶区域内不存在物体,自动驾驶控制单元500将标准行驶区域按原样作为最终的目标行驶区域而指示给车辆运动控制单元600后,如图15所示,其他车辆110从横道闯出到车辆100要行驶的车道内。
153.此时,自动驾驶控制单元500如图15所示,不等待设为基准的行驶区域的指示定时而迅速地向车辆运动控制单元600指示新的行驶区域,即从车辆100要行驶的车道去除了存在其他车辆110的物体区域后的行驶区域,从而设定避开了其他车辆110的目标行驶轨道。
154.另外,自动驾驶控制单元500基于如上述的突发性状况变化而指示新的行驶区域时,能够向车辆运动控制单元600指示行驶区域作为比标准更短的区域。
155.然后,自动驾驶控制单元500在基于突发性状况变化指示了比标准更短的行驶区域后,如图16所示,在车辆100驶过指示的行驶区域前,向车辆运动控制单元600指示新的行驶区域。
156.图15以及图16所示的例子,是产生物体信息中的状况变化的情况,但自动驾驶控制单元500在产生了与在上一次指示的行驶区域中未反映的路面信息有关的状况变化的情况中,也能够与从上一次的行驶区域的指示开始的经过时间(或行驶距离)无关地,指示反映了状况变化的新的行驶区域。
157.图17例示包含从标准行驶区域向左右超出的区域的行驶区域被指示的情况。
158.图17所示的例子为其他车辆110进入车辆100要行驶的车道内,且车辆100在同一车道内很难避开其他车辆110而行驶的情况。
159.此时,为了使本车回避其他车辆110而行驶,自动驾驶控制单元500指示超出车辆100所行驶的车道的、包含邻接的车道(详细而言,超车车道、对面车道等)的行驶区域。
160.即,自动驾驶控制单元500在本车道内存在其他车辆110等物体,且在本车道内难以使车辆100避开物体而行驶的情况下,若没有在邻接的车道上行驶的车辆等条件成立,则向车辆运动控制单元600指示从本车道超出到邻接的车道的行驶区域。
161.然后,车辆运动控制单元600通过在由自动驾驶控制单元500指示的行驶区域内设定目标行驶轨道,来使车辆100行驶在避开本车道内存在的物体的行驶轨道上。
162.另外,自动驾驶控制单元500在没有邻接车道的情况、其他车辆行驶在邻接车道的情况等不能指示超出到邻接的车道的行驶区域的情况下,向车辆运动控制单元600输出用于使车辆100停止于车道内存在的物体的跟前的制动指令。
163.图18作为从标准行驶区域去除碰撞风险区域后的行驶区域被指示的情况的一方式,表示将闯出的警戒区域设为碰撞风险区域的情况。
164.图18所示的例子为标准行驶区域(换言之,本车道)的左侧建有招牌120且行人从成为死角的招牌120的内侧向本车道内闯出等被忧虑的状况。
165.此时,自动驾驶控制单元500从成为死角的招牌120的内侧开始面向本车道内而设定碰撞风险区域(换言之,闯出的警戒区域),将从标准行驶区域除去碰撞风险区域的区域
作为行驶区域而向车辆运动控制单元600指示。
166.据此,车辆运动控制单元600使本车行驶在预先避开了碰撞风险区域(详细而言,闯出警戒区域)的轨道上,改善车辆100的行驶安全性。
167.图19作为从标准行驶区域去除碰撞风险区域后的行驶区域被指示的情况的一方式,表示将存在于路肩的物体的附近区域设为碰撞风险区域的情况。
168.图19所示的例子为右侧的路肩建有高墙130的情况,有关墙130并不直接成为行驶的障碍。
169.在这里,自动驾驶控制单元500能够将墙130的附近设定为碰撞风险区域,以使车辆100不行驶在墙130的附近,向车辆运动控制单元600指示避开了墙130的附近的行驶区域。
170.据此,车辆运动控制单元600使本车在避开了墙130等物体的附近的轨道上行驶。
171.图20-图22例示自动驾驶控制单元500向车辆运动控制单元600指示的目标指令除了行驶区域的指令以外还包含车辆100的前方的路面信息和/或物体信息的情况。
172.图20例示行驶区域内存在多个物体的情况的、车辆100前方的行驶区域内存在招牌120以及停车车辆140的情况。
173.在有关状况的情况下,自动驾驶控制单元500除了向车辆运动控制单元600指示行驶区域以外,还指令招牌120的位置、大小的信息、停车车辆140的位置、大小的信息作为物体信息。
174.与行驶区域一起还被指示了物体信息的车辆运动控制单元600设定被指示的行驶区域内的、且避开了存在于行驶区域内的招牌120、停车车辆140等物体的目标行驶轨道。
175.图21例示在行驶区域内存在作为物体的招牌120的同时,在行驶区域内部分地存在路面侧斜150的情况。
176.另外,路面侧斜150是指路面的左右方向的倾斜。
177.在这种情况下,自动驾驶控制单元500对车辆运动控制单元600指示行驶区域,并且还指令招牌120的位置、大小的信息作为物体信息,进一步,指令路面侧斜150的区域、倾斜角、倾斜方向等信息作为路面信息。
178.与行驶区域一起被指示了物体信息以及路面信息的车辆运动控制单元600在被指示的行驶区域内考虑物体信息以及路面信息来设定目标行驶轨道。
179.在这里,车辆运动控制单元600设定目标行驶轨道以避开行驶区域内的招牌120。
180.进一步,若能够避开路面侧斜150而行驶,则车辆运动控制单元600设定避开路面侧斜150的区域的目标行驶轨道,在难以避开路面侧斜150而行驶的情况下,在通过路面侧斜150的轨道中选定乘坐舒适度尽量好的轨道来作为目标行驶轨道。
181.图22例示在行驶区域内存在作为物体的招牌120,并且还在行驶区域内部分地存在摩擦系数μ低的路面160(以下称为低μ路面160。)的情况。
182.另外,低μ路面160为正产生水坑、结冰、积雪或者压雪等的路面,进而为被吹落了沙子、落叶等的路面等。
183.这种情况下,自动驾驶控制单元500对车辆运动控制单元600指示行驶区域,并且还指令招牌120的位置、大小的信息作为物体信息,进一步,指令低μ路面160的区域等信息作为路面信息。
184.与行驶区域一起被指示了物体信息以及路面信息的车辆运动控制单元600在被指示的行驶区域内考虑物体信息以及路面信息来设定目标行驶轨道。
185.在这里,车辆运动控制单元600设定目标行驶轨道以避开行驶区域内的招牌120。
186.进一步,车辆运动控制单元600若能够避开低μ路面160而行驶则设定避开了低μ路面160的区域的目标行驶轨道,在难以避开低μ路面160而行驶的情况下,则在通过低μ路面160的轨道中选定乘坐舒适度尽量好的轨道作为目标行驶轨道。
187.然而,自动驾驶控制单元500能够对车辆运动控制单元600指示行驶区域(以及路面信息、物体信息),并且还能够指示在行驶区域内推荐的行驶轨道,即推荐轨道。
188.然后,车辆运动控制单元600能够使车辆100沿着被指示的推荐轨道而行驶,且在判断为在推荐轨道上没有与乘坐舒适度、舒适性、晕车等有关的恶化因素时,输出用于使车辆100沿着推荐轨道而行驶的控制指令。
189.另一方面,车辆运动控制单元600在判断为不能使车辆100沿着被指示的推荐轨道而行驶的情况下,和/或在判断为在推荐轨道上有与乘坐舒适度、舒适性、晕车等有关的恶化因素时,单独求取与推荐轨道不同的目标行驶轨道。
190.即,车辆运动控制单元600在判断为无法使车辆100沿着由自动驾驶控制单元500指示的推荐轨道而行驶的情况下,取代推荐轨道,而新求取能够使车辆100跟随行驶的目标行驶轨道。
191.此外,车辆运动控制单元600在判断为还存在比由自动驾驶控制单元500指示的推荐轨道更能够改善乘坐舒适度等的行驶轨道的情况下,取代推荐轨道,求取乘坐舒适度等更好的目标行驶轨道。
192.然后,车辆运动控制单元600输出用于使车辆100沿着单独求取到的目标行驶轨道而行驶的控制指令。
193.图23-图25表示自动驾驶控制单元500指示推荐轨道的情况下的车辆运动控制单元600中的目标行驶轨道的设定。
194.图23表示在自动驾驶控制单元500指示的推荐轨道中能够行驶且在推荐轨道中没有与乘坐舒适度等有关的恶化因素的情况中的推荐轨道和目标行驶轨道。
195.这种情况下,车辆运动控制单元600将推荐轨道原样设定为目标行驶轨道,向致动器部700输出用于使车辆100沿着有关目标行驶轨道而行驶的控制指令。
196.图24表示在自动驾驶控制单元500指示的推荐轨道上存在掉落物等物体且不能够使车辆100沿着推荐轨道而行驶的情况中的推荐轨道和实际的行驶轨道。
197.此时,车辆运动控制单元600基于由自动驾驶控制单元500指示的行驶区域、推荐轨道、物体信息,判断推荐轨道上存在物体,并取代推荐轨道,在被指示的行驶区域内设定使车辆100避开物体而行驶的目标行驶轨道。
198.图25表示在自动驾驶控制单元500指示的推荐轨道上有与乘坐舒适度等有关的恶化因素的情况。
199.此时,车辆运动控制单元600估计在使车辆100行驶在推荐轨道中的情况下产生的横向加速度、横向加加速度等,将与使车辆100沿着推荐轨道而行驶的情况相比,更能够使对车辆100产生的横向加速度或横向加加速度变小的轨道设为目标行驶轨道。
200.然而,车辆运动控制单元600除了能够在由自动驾驶控制单元500指示的行驶区域
内确定作为线的行驶轨道以外,能够向致动器部700输出控制指令,以设定行驶轨道作为包含了车辆100行驶的可能性的区域,而使车辆100通过可能性的设定尽量高的区域,换言之,使车辆100通过与成为可能性极值的位置尽量近的位置。
201.图26-图29是用于说明作为包含了车辆100行驶的可能性的区域的目标行驶轨道的设定的图。
202.图26表示由自动驾驶控制单元500指示的行驶区域、车辆100实际行驶的轨道、车辆100行驶的可能性高的区域的一方式。
203.此外,图27-图29表示在由自动驾驶控制单元500指示的行驶区域中、从车辆100的当前位置起的距离不同的各地点i,ii,iii(参考图26)中的左右方向上的行驶可能性的设定状态。
204.车辆运动控制单元600在考虑车辆100的乘坐舒适度、舒适性、晕车等的同时,基于由自动驾驶控制单元500指示的行驶区域而设定行驶可能性。
205.另外,在图27-图29中,将车辆100的当前位置中的车辆100的前后方向设为基准线sl,通过从有关基准线sl开始到行驶区域的左右端为止的距离来表示各地点i,ii,iii中的左右方向的位置。
206.然后,如图26所示,将地点i中从基准线sl到行驶区域的左端的距离设为距离a,将地点ii中从基准线sl到行驶区域的左端的距离设为距离c,将地点iii中从基准线sl到行驶区域的左端的距离设为距离d。
207.在这里,在图26所示的例子中,距离c《距离a《距离d,此外,从基准线sl到行驶区域的右端的距离在各地点i,ii,iii中为距离b,进一步,设距离a=距离b。
208.由于距离a=距离b,在地点i中,基准线sl位于行驶区域的中央。
209.因此,车辆运动控制单元600如图27所示,车辆100的行驶可能性设定为在基准线sl的位置(即,行驶区域的中心)成为极值,以使车辆100在地点i中通过与基准线sl的位置尽量近的位置。
210.另一方面,在地点ii中,从基准线sl到行驶区域的左端的距离c比从基准线sl到行驶区域的右端的距离b更短,优选车辆100通过比基准线sl更靠右的路线。
211.因此,车辆运动控制单元600如图28所示,在地点ii中,将车辆100的行驶可能性设定为在比基准线sl更靠右处成为极值,以使车辆100通过比基准线sl更靠右的路线。
212.此外,在地点iii中,从基准线sl到行驶区域的左端的距离d比从基准线sl到行驶区域的左端的距离b更长,优选车辆100通过比基准线sl更靠左的路线。
213.因此,车辆运动控制单元600如图29所示,在地点iii中,将车辆100的行驶可能性设定为在比基准线sl更靠左处成为极值,以使车辆100通过比基准线sl更靠左的路线。
214.另外,车辆运动控制单元600将进行可能性设定以使车辆100行驶在行驶区域的中央附近作为基本,考虑车辆100的乘坐舒适度等而设定将可能性设为极值的位置。
215.然而,车辆控制系统200并不限定于图1所示的结构,即由具有作为认知判断部的功能的自动驾驶控制单元500以及具有作为基于行驶区域的指示信息而向致动器部700输出控制指令的控制部的功能的车辆运动控制单元600所构成的结构。
216.例如,车辆控制系统200能够具备兼备作为认知判断部的功能和作为控制部的功能的综合控制单元来取代图1所示的自动驾驶控制单元500以及车辆运动控制单元600。
217.图30所示的车辆控制系统200具备具有作为认知判断部的功能和作为控制部的功能的综合控制单元800来取代自动驾驶控制单元500以及车辆运动控制单元600。
218.另外,在图30中,对与图1相同的元素附以相同的标号,省略详细的说明。
219.综合控制单元800在相同框体内搭载2个微型计算机810、820而构成。
220.第1微型计算机810作为软件而具有作为认知判断部的功能,第2微型计算机820作为软件而具有作为基于由第1微型计算机810指示的行驶区域的指示信息而向致动器部700输出控制指令的控制部的功能。
221.在这里,第1微型计算机810作为软件而具备作为如图1所示的周边状况识别部510、行动计划部520、目标生成部530的功能,即,作为认知判断部的功能。
222.此外,第2微型计算机820作为软件而具备作为如图1所示的轨道加工部610、轨道跟随控制部620的功能,即,作为控制部的功能。
223.然后,第1微型计算机810通过基于来自外界识别部300的信息的识别以及判断来设定行驶区域,对第2微型计算机820指示行驶区域。
224.另一方面,第2微型计算机820向致动器部700输出用于使车辆100在从第1微型计算机810取得的行驶区域中,以基于与车辆100的行驶有关的各要素的车辆100的速度以及行驶轨道而行驶的控制指令。
225.图31表示在综合控制单元搭载了1个微型计算机的车辆控制系统。
226.另外,在图31中,对与图1相同的元素附以相同的标号,省略详细的说明。
227.图31所示的车辆控制系统200具备具有作为认知判断部的功能和作为控制部的功能的综合控制单元850,而综合控制单元850具备作为软件而具备作为认知判断部的功能以及作为控制部的功能的1个微型计算机860。
228.即,在微型计算机860中,不仅搭载了体现周边状况识别部510、行动计划部520、以及目标生成部530的第1逻辑861(换言之,上位单元逻辑、或认知判断逻辑),还搭载了体现轨道加工部610、轨道跟随控制部620的第2逻辑862(换言之,下位单元逻辑、或控制逻辑)。
229.然后,第1逻辑861基于来自外界识别部300的信息来设定行驶区域,向第2逻辑862指示行驶区域的信息。
230.第2逻辑862求取用于使车辆100在第1逻辑861指示的行驶区域中,以基于与车辆100的行驶有关的各要素的车辆100的速度以及行驶轨道而行驶的控制指令,并向致动器部700输出求取到的控制指令。
231.此外,如图30所示,在搭载了第1微型计算机以及第2微型计算机的综合控制单元中,各微型计算机的运算功能的分担并不限于图30所示的分担。
232.图32表示变更了各微型计算机的运算功能的分担的车辆控制系统200。另外,在图32中、对与图1相同的元素附以相同的标号,省略详细的说明。
233.图32所示的综合控制单元870搭载第1微型计算机880以及第2微型计算机890。
234.然后,第1微型计算机880作为软件而具备作为周边状况识别部510的功能,第2微型计算机890作为软件而具备作为行动计划部520、目标生成部530、轨道加工部610、轨道跟随控制部620的功能。
235.即,第1微型计算机880中搭载了作为认知判断部的功能的一部分,第2微型计算机890中搭载了作为认知判断部的功能的剩余部分以及作为控制部的功能。
236.另外,第1微型计算机880中能够搭载作为认知判断部的功能和作为控制部的功能的一部分,第2微型计算机890中能够搭载作为控制部的功能的剩余部分。
237.上述实施方式中说明的各技术思想在不产生矛盾的范围内能够适当组合使用。
238.此外,参考优选实施方式而具体说明了本发明的内容,但基于本发明的基本技术思想以及启示,本领域技术人员可以采取各种各样的变形方式是不言而喻的。
239.例如,车辆控制系统200的认知判断部在发生突发性状况变化时,能够向控制部指示与状况变化有关的路面信息、物体信息,来取代向控制部指示基于状况变化的新的行驶区域。
240.此外,车辆控制系统200的认知判断部能够基于车辆100的速度、与前行车的时间间隔、前行车的有无等条件而变更对控制部指示的行驶区域的车辆行进方向的长度和/或行驶区域的指示周期。
241.此外,车辆控制系统200的认知判断部能够取得车辆100周边中的气象信息(风向、风速、降雨量、积雪量等),并基于这些气象信息而变更行驶区域的指示。
242.例如,车辆控制系统200的认知判断部在行驶区域的指示中,在横向风强时或由于大型车的接近等而有受到横向风的可能性时,或使左右方向的宽度与横向风的影响小时相比变窄并指示行驶区域,或指示比车道中央更偏迎风方向的行驶区域。
243.此外,控制部能够基于从认知判断部取得的起伏、坑洼等路面信息,控制电子控制悬架750来调整阻尼力、车高。
244.此外,车辆控制系统200的认知判断部在向控制部指示推荐轨道时,能够将避开物体的路线作为推荐轨道而求取。
245.此外,可以构成为车辆控制系统200中的乘坐舒适度的优先程度(具体而言,最大容许横向加速度或最大容许横向加加速度)能够通过车辆100的乘员操作模式设定切换等而任意地选择。
246.此外,可以设为将认知判断部设置于车辆100的外部,搭载于车辆100的控制部能够使用路车间通信装置330等而从外部通过无线而收取包含行驶区域的目标指令的系统。
247.此外,可以设为在基于碰撞风险区域而设定行驶区域时,使碰撞风险区域的信息包含风险程度的信息,并基于风险程度而变更目标车速和/或目标行驶轨道的结构。
248.例如,可以设为在风险程度比规定更低的情况下,降低目标车速并容许通过碰撞风险区域的行驶轨道的设定的结构。
249.附图标记说明
250.100
…
车辆、200
…
车辆控制系统、300
…
外界识别部、400
…
车辆运动检测部、500
…
自动驾驶控制单元(第1控制单元)、510
…
周边状况识别部、520
…
行动计划部、530
…
目标生成部、540
…
微型计算机(认知判断部)、600
…
车辆运动控制单元(第2控制单元、车辆控制装置)、610
…
轨道加工部、620
…
轨道跟随控制部、630
…
微型计算机(控制部)、700
…
致动器部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1