用于运行车辆的方法与流程
1.本发明涉及根据权利要求1所述的用于运行车辆的方法,以及根据并列的权利要求6和10所述的车辆和用于车辆的转向操纵件。关于现有技术,例如可参考ep3429906b1和de102016225452a1。
背景技术:
2.从现有技术中已知许多高度自动化驾驶的方案和对此负责的驾驶员辅助系统。由此,例如已知如下驾驶员辅助系统,所述驾驶员辅助系统在驾驶任务中为驾驶员提供支持或甚至使车辆完全接管特定驾驶任务,如车辆的纵向引导和/或横向引导。在此,在驾驶员辅助系统的辅助功能不再足够的安全临界情况下,驾驶员辅助系统会要求驾驶员自己接管车辆引导。这种要求被称为所谓的接管要求。此外,驾驶员始终能够根据期望介入驾驶员辅助系统的高度自动化任务中并且因此手动接管驾驶任务。根据驾驶员辅助系统接管的驾驶任务,存在不同的接管方案,即驾驶者施加的方式或动作,以给出驾驶者想自己接管相应的驾驶任务的信号,并且因此停用在该时间点实施高度自动化驾驶任务的驾驶员辅助系统。在高度自动化的横向引导的情况下,接管方案是通过介入到方向盘中、即由驾驶员操作方向盘而已知。由此,例如从ep3429906b1中已知一种接管方案,其中,当车辆乘员接触到转向操纵件的特定区域时,则由驾驶员接管横向引导。在此,方向盘被划分为明确的区域,其中,仅接触特定区域才由驾驶员接管横向引导。由此,可以防止不自觉地从自主横向引导转变为由驾驶员进行手动横向引导,例如由于轻触或无意地转动方向盘,例如由于驾驶员的膝盖靠在方向盘上。
3.利用所提到的自主驾驶或高度自动化驾驶的方案得到尤其是在车辆内部空间内的空间利用的可能性方面新的和不同的几何设计。传统的和原来作为圆形方向盘已知的转向操纵件正越来越多地被更小、节省空间和符合人体工程学的转向操纵件方案所取代。例如由de102016225452a1描述了这样一种不具有圆形形状的转向操纵件。传统的转向圈在此被两个用作为手柄的转向元件所取代。手柄相互耦联并与转向角耦联,从而手柄总是同步运动。通过使手柄运动,导入围绕中心轴的转向运动。
4.这种非圆形构造的转向操纵件方案通常在零位置中,即在非转向的状态下这样构造,使得车辆乘员具有更多的腿部自由空间,因为传统的圆弧形的方向盘区段不再布置在下部的方向盘半部上。驾驶员在直线行驶时可以将这个空间用于其腿部。然而,例如在弯道行驶时当转向操纵件围绕其转动轴转动时,该自由空间被转向操纵件占用。如果在这样的弯道行驶中驾驶员的腿部仍总是处于这个自由空间内,则可能会导致舒适性损失或冲突,因为转向操纵件由于转向回转而占用了这个空间。例如,尽管车辆乘员没有为手动的车辆引导做好准备,但可能发生从自主驾驶模式意外地或无意地转变为手动驾驶模式。
5.通过将转向操纵件转动到已经被占用的自由空间,在一些情况下转向操纵件的转动运动可能受到阻碍,这可能例如导致转向操纵件与车辆乘员的身体一部分发生令人不快的碰撞。
技术实现要素:
6.因此,本发明的任务是表明一种用于运行车辆的方法,在该方法中可以防止所提及的缺点。
7.所述任务通过具有权利要求1的特征的用于运行车辆的方法以及借助根据并列的权利要求6和10的用于执行该方法的车辆和转向操纵件来解决。有利的实施例和扩展方案是从属权利要求的内容。
8.提出了一种用于运行车辆的方法,其中,车辆可以在具有自主横向引导的驾驶模式中以及在具有手动横向引导的驾驶模式中运行。
9.在自主横向引导期间,车辆驾驶员或乘员不接触转向操纵件,并且车辆完全接管转向任务。
10.在此,优选规定,在车辆的这种自主横向引导期间,转向操纵件与被转向的车辆车轮相耦联,使得当车辆被转向时,转向操纵件围绕其转动轴线执行实际的转动。在手动横向引导的情况下,车辆驾驶员或车辆乘员的任务是操作转向操纵件并且因此使车辆转向。
11.如前所述,所述车辆包括转向操纵件。该转向操纵件在此包括转向操纵件区域范围。在本发明的意义下,这样的向操纵件区域范围描述了一个三维空间,该空间通过多个在所述转向操纵件围绕其转向轴线转动360
°
时由转向操纵件几何形状所经过的虚拟的转动路径形成。如果转向操纵件围绕其转向轴线转动360
°
(转动一圈),则转向操纵件几何形状就经过一个虚拟的圆形对称的路径,该路径的虚拟展开部又形成上述空间,该空间是转向操纵件区域范围。因此,该空间至少与转向操纵件本身一样大地构造。因此,空间在其尺寸方面至少这样选择,使得在特定的转入位置中或在特定的转向操纵件转动角度下,转向操纵件的至少一部分占据这个空间。
12.特别优选的是,所述空间或转向操纵件区域范围在此甚至选择得更大一些,从而在转向操纵件本身旁边还存在更多的空间,即所谓的公差区域。该公差尤其是有益的,以便针对振动鲁棒地设计并且确保车辆乘员的手在任何时候以及在任何转向角度的情况下都能握住转向操纵件。
13.此外,在本发明的一个优选实施方案中,转向操纵件非圆形地构造。如果转向操纵件在其几何形状方面不再圆形地构造,而是例如以窄的长方形形式、以椭圆形形式或以条形形式等来构造,则根据转向操纵件的转动角度,在任何转动情况下,这个转向操纵件区域范围都不会被转向操纵件完全占据。所述空间的在转向操纵件的特定的转动情况下正好没有被转向操纵件本身占据的那部分在此是自由空间,该自由空间无缝过渡到车辆内部空间中。
14.在本发明的一个优选实施例中,转向操纵件构造为,使得在转向操纵件零位置期间、即在转向操纵件未被转动时(该转向操纵件零位置例如在车辆的直线行驶期间被调整到),所述自由空间是用于坐在驾驶员座椅上的车辆乘员的腿部或下半身的额外空间。
15.在针对所提出的方法的初始位置中,车辆处于具有自主横向引导的驾驶模式中。车辆或车辆的合适的驾驶员辅助系统在此接管车辆横向引导。驾驶员或车辆乘员的手在此没有放在转向操纵件上。优选的是,车辆还处于运行中,即处于行驶中。
16.如果在车辆的这种自主横向引导驾驶模式中现在检测到转向操纵件区域范围的上述自由空间至少部分被物体或车辆乘员的身体部分所占据或占用和/或如果物体或由车
辆乘员的身体部分低于与该自由空间的预定的距离,则这向车辆乘员发出信号。
17.例如,如果驾驶员的膝盖在车辆的直线行驶期间处在转向操纵件区域范围的自由空间中、即处在转向操纵件区域范围的在这个特定的转向情况下正好没有被转向操纵件占据的空间中,则规定,向车辆乘员发出警告或信号。
18.通过相应的警告,可以向车辆乘员发出信号而指示物体或车辆乘员的身体部分介入到自由空间中或者低于所述与自由空间的距离。由此,车辆乘员能够从自由空间中移开物体或身体部分。如果车辆乘员由于发出信号而从自由空间中移开物体或使身体部分从自由空间中运动出来,则可以有利地避免物体或身体部分将来可能与转入到自由空间中的转向操纵件发生意外碰撞。
19.例如,可以通过声学和/或视觉和/或触觉信号向车辆乘员发出这种警告或信号。特别优选的是,该信号冗余地构造,从而在一个信号途径发生故障时,就调整到另一个信号途径。
20.例如,视觉反馈或信号发出可以在汽车仪表盘中或在抬头显示器(hud)中或在其他可用的显示元件中进行。
21.在此,这种视觉反馈可以例如以静态图标、文字(例如“请将膝盖/物体从转向区域中移开”)、行动指示动画或类似的形式进行。这样的行动指示动画可以例如通过展示干扰性的物体或车辆乘员的身体部位的重新定位来实现。
22.例如,在声学信号发生的情况下,可以使用警告声音或语音输出来指示行动。
23.例如,作为触觉信号或警告,一个或多个车辆内部件、如车辆座椅或踏板或转向操纵件本身可以震动。
24.在本发明的一个优选实施方案中,上述方法步骤在预定的时间间隔内反复执行。如果在此识别到紧接着上文描述的信号发出或警告没有发生物体或乘员身体部分的移开,则可以例如通过控制单元导入另外的措施。尤其是,可以在这种(不成功的)警告之后,要求车辆乘员进行手动的车辆引导,尤其是手动的车辆横向引导和/或车辆纵向引导。
25.此外,可以使情况进一步升级,其方式为,直接在发出信号不成功之后或在要求接管车辆引导不成功之后使车辆停止。
26.在此,通过至少一个传感器单元检测到介入到所述自由空间中或低于与自由空间的所述距离。随后的信号输出以及可能的后期的接管要求或将车辆置于静止在此优选由一个或多个共同作用的控制单元进行。
27.该传感器单元在此可以是至少一个光学传感器或至少一个超声波传感器或至少一个电容传感器或至少一个雷达传感器或至少一个激光雷达传感器。
28.由于在要监测的区域中的部分艰难的光情况,在光学传感器的情况下,优选使用适当光强的摄像头,如红外摄像头或附加照明(可能也在uv范围内)。
29.例如,作为光学传感器可以使用一个或多个内部空间摄像头。在此,可以使用在车辆中已经存在的传感器单元以及尤其是内部空间摄像头。例如,这样的摄像头可以布置在车辆内部空间的顶部中或布置在车辆车顶中。
30.除此以外,这样的传感器单元可以布置在车辆乘员的脚部空间中或直接在转向操纵件的下方布置在车辆乘员的脚部空间区域中,尤其是布置在转向柱装饰件下方。
31.所提出的方法、用于执行所述方法的所提出的车辆和用于这种车辆的所提出的转
向操纵件使得能够在车辆的自主横向引导过程期间避免车辆乘员的舒适性损失。此外,能够以有利的方式解决冲突情况并且避免不愉快和不期望的情况。
32.除了权利要求和说明书外,这些和其他特征也从附图中得出,其中,各个特征可以在本发明的一个实施方式中分别单独地或以多个组合的形式实现,并且可以构成有利的且可本身可受保护的实施例,这些实施例在此要求保护。
附图说明
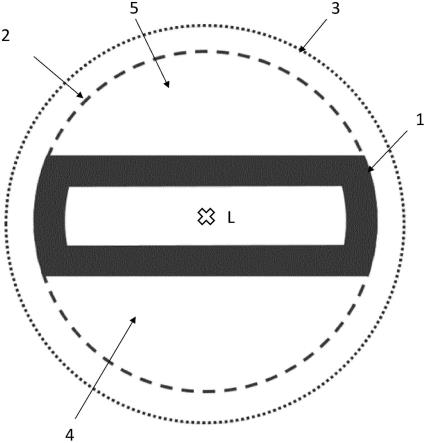
33.在下文中,根据一个实施例来进一步解释本发明。在唯一的图中,在此示意性地以前视图示出处于安装在未绘制的车辆中的状态下的转向操纵件1。在此,所有更详细描述的特征可以对于本发明是关键的。
具体实施方式
34.可以利用所示的转向操纵件1转向的车辆既可以在手动驾驶模式中运行,也可以在自主驾驶模式中运行。在手动驾驶模式中,车辆的横向引导、即车辆的转向通过操作转向操纵件1或通过围绕转向轴线l转动转向操纵件来进行。在车辆的自主驾驶模式中,车辆或驾驶员辅助系统接管车辆的横向引导。在这样的自主驾驶模式中,在这个具体的示例中规定,转向操纵件1与转向的车辆车轮耦联,使得转向操纵件1与车轮的实际转向角度同步地也一同转动。
35.在这种情况下,转向操纵件不像传统上已知的转向操纵件那样是圆形的,而是以窄的至少近似椭圆形的结构形式构造。安装到车辆中的转向操纵件1相对于转向轴线l的图中所示的位置是转向操纵件1的零位置或中性位置,在这个零位置或中性位置中,车辆的车轮没有经历转向回转。在安装在车辆中的状态下在转向操纵件1的零位置中,车辆因此处于直线行驶中。
36.在图中也可以看出呈第一虚线形式的转向操纵件区域范围2。该转向操纵件区域范围2是一个在该情况下圆盘形的空间,该空间通过在所述转向操纵件1围绕其转向轴线l转动360
°
时由转向操纵件几何形状所经过的虚拟的最外部的转动路径形成。
37.如果转向操纵件1围绕其转向轴线l转动,则该转向操纵件根据转动角度至少总是需要所述的空间或转向操纵件区域范围2的一部分。然而,由于转向操纵件1并不是相应于转向操纵件区域范围2圆形地构造并且构造为不完全占据该转向操纵件区域范围,因此在转向操纵件区域范围2内在任何时候都存在自由空间。在转向操纵件1的如图中所示的中性位置的情况下,转向操纵件区域范围2的下部分4和上部分5构造为自由空间。
38.在转向操纵件1的安装状态下,当转向操纵件1处于中性位置中时,位于驾驶员座椅上的车辆乘员的腿部位于转向操纵件1的下方。在此可能发生的是,在车辆的自主横向引导期间,该车辆乘员在这种情况下将其腿部放置在转向操纵件区域范围2的下部的自由空间4中。
39.如果现在在以自主横向引导行驶期间转向操纵件位置发生变化,并且转向操纵件1例如围绕转向轴线l向左或向右转动,则可能会发生车辆乘员的安放在下部的自由空间4中的腿部意外地与转向操纵件1的一部分碰撞。
40.在发生这种碰撞的情况下,可能出现不适或令人痛苦的驾驶情况。
41.为了避免这样的碰撞,因此规定,在具有自主横向引导的行驶期间检测到——例如由车辆乘员的腿部——介入到转向操纵件的自由空间4、5中或占用转向操纵件的自由空间。这种检测能以已经描述的方式进行,例如通过合适的摄像头系统或其他传感器进行。在这种检测的情况下则规定,以同样描述的方式警告或要求车辆乘员将腿部或干扰性的物体从自由空间中移开。
42.在这种情况下,转向操纵件区域范围2还设有公差区域3(也用虚线表示)。在这种情况下,当物体或车辆乘员的身体部分低于与公差区域3的特定距离或介入到公差区域3中时,车辆乘员已被警告。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1